 自制扫描仪DIY图解
自制扫描仪DIY图解
步骤1:获取材料
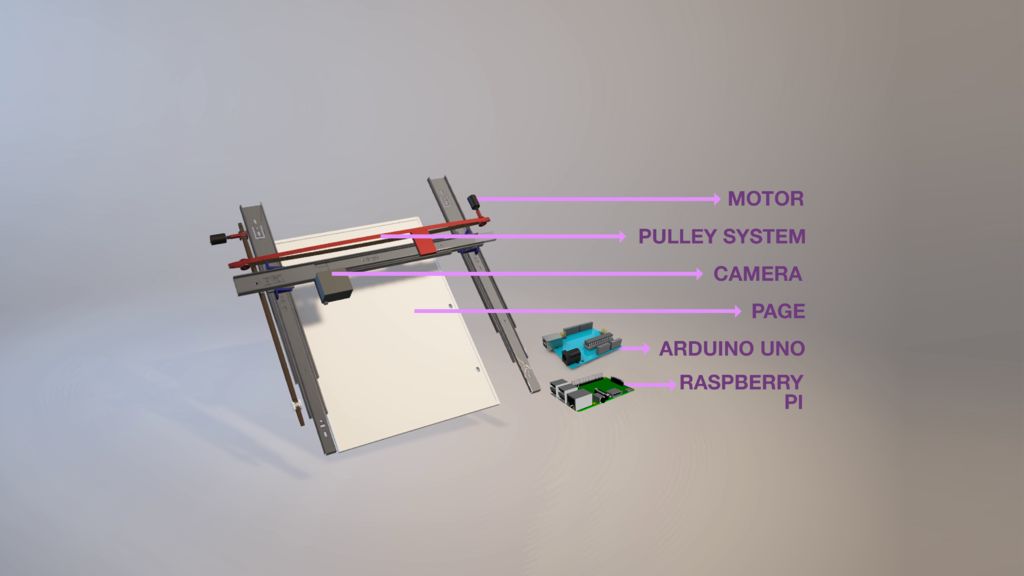
我们使用的材料在市场上都很容易获得。最难获得的是最后由我们管理的单滑轮系统。该项目所需的材料是:
两个360度伺服器或一个伺服器和一个直流电动机
3个滑架
滑轮系统
MDF板
Arduino Uno
Raspberry Pi
网络摄像头或RPI摄像头模块
跳线
面包板
步骤2:组装硬件
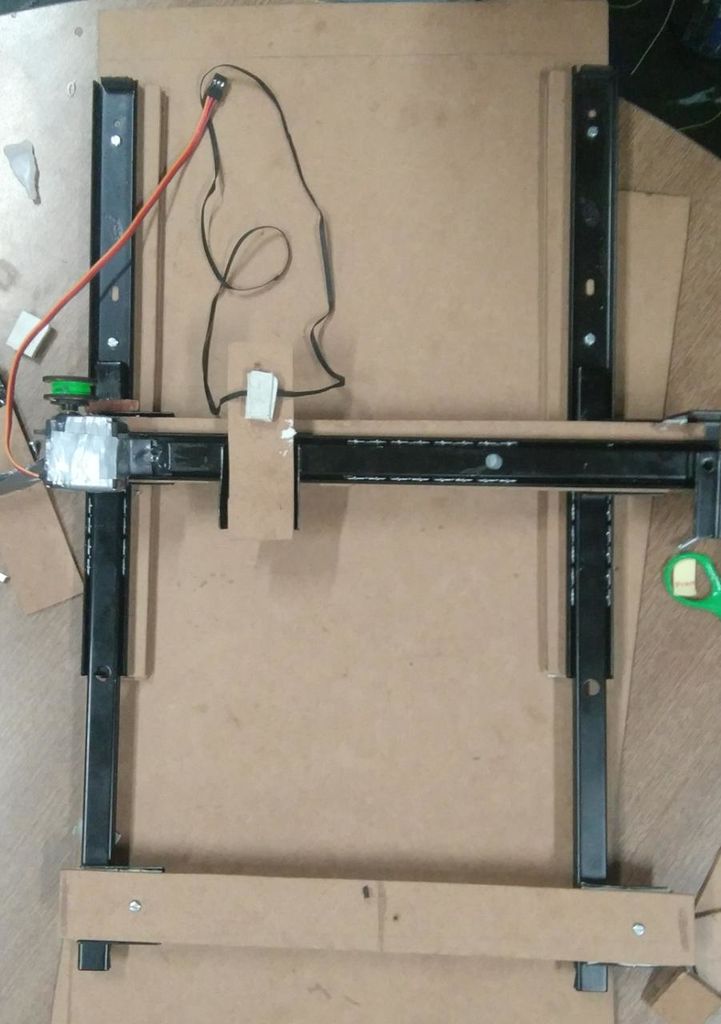
要组装硬件,请拧紧两个滑翔机彼此平行,其间隙大约等于MDF板上A4纸的宽度。
接下来,将最后一个滑翔器螺栓固定在此设置的顶部,以使其垂直于其他两个滑翔器并在它们旁边移动。
此初始设置足以开始查看设置的外观。平行滑翔机应上下移动,顶部滑翔机应允许左右移动。为了稳定设置,请在平行滑翔机之间安装另一个MDF板条,距离垂直滑翔机约10英寸。如果您还使用直流电动机代替第二个伺服器,则将有帮助。
步骤3:设置电动机
如果您使用两个伺服电机,则需要两个皮带轮系统。
对于两个伺服电机,将一个皮带轮安装在每个这些皮带轮的顶部
设置一个这些平行于平行滑翔机,然后在滑翔机底座附近安装另一个滑轮。
使用滑轮设置,将其连接到其中一个平行滑翔机上。当皮带轮旋转时,两个平行滑翔机应一起移动。
通过在滑翔机顶部安装MDF条并在其中设置皮带轮系统,对垂直滑翔机重复此设置。
如上所述,仅在垂直部分安装
》
将直流电动机的A4长度加到滑翔机底座的5英寸处。确保直流电动机如下面视频中所示为侧面
将滑轮电缆条从该电动机连接到上一步中连接的第二个MDF板上
PS确保所有组件都受到保护,否则将在随后的步骤中使APART掉落。
步骤4:设置相机
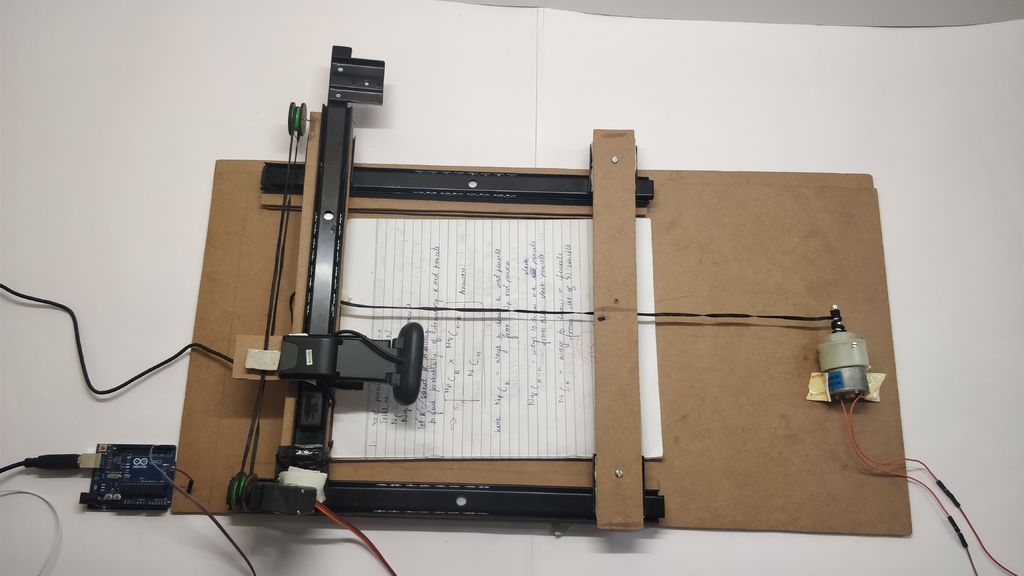
按照此步骤中显示的视频和图片所示,将相机安装到垂直滑翔机上。相机将被提升得更高,并且设置不应出现在图像中。这将需要反复试验,但是很容易做到。为了获得更好的分辨率,请使用更高分辨率的相机!
确保镜头与页面平行以获取最大的拉伸图像。
步骤5:设置Arduino

由于所有电机都将连接到Arduino,因此需要进行一些设置。为此,请参阅有关如何使用步进电机和直流电机设置Arduino的教程。与之关联的功能有:
对于垂直滑翔机:
滑轮系统必须根据图片的宽度将其移动到3个或更多不同的位置可以通过相机实现。摄像机的高度也可以据此调节,以减轻电机负载。
电机到达页面末尾后,应恢复到其原始位置
对于平行滑行器:
伺服:
皮带轮系统应与电机配合使用,如上所示。每次完成一行时,系统都应根据相机所拍摄图像的高度向下移动页面
使用直流电动机:
应将滑翔机拉下与图像高度相同的长度。为此,请使用按钮系统,因为直流电动机可以在一段时间内减少电池电量
步骤6:设置Raspberry Pi

将相机连接到Raspberry Pi。在线查找以了解如何编写代码,使您可以从Raspberry Pi拍摄图像。这仅仅是从终端查看Camera代码并编写启动循环的问题。
步骤7:连接Raspberry Pi和Arduino
将Arduino引脚的高/低输出引脚连接到Raspberry Pi的输入引脚。
将此部分添加到图片循环中,并对Arduino进行编程,以便仅在电机不移动且相机位于页面应拍摄图像的部分上时,该引脚才发送高信号。确保所有这些图像都已发送到计算机或存储在Raspberry Pi中。
步骤8:图像重建
到确保图像已重建,请查看python中的PIL和Numpy库。
现在,扫描仪已完成!
步骤9:想象力
现在,请随便使用扫描仪!传统上还是惊人的!玩得开心!
-
扫描仪
+关注
关注
2文章
424浏览量
67880
发布评论请先 登录
相关推荐
微软已修复扫描仪USB连接问题
如何将三维激光扫描仪与BIM结合使用
三维激光扫描仪在工程测量中的优势
三维激光扫描仪与无人机结合的应用
三维激光扫描仪使用技巧 三维激光扫描仪测量精度分析
三维激光扫描仪应用领域 三维激光扫描仪与传统测量工具比较
大幅扫描仪扫描地图怎么操作
蔡司激光三维扫描仪有效扫描金属材料

何为电磁干扰(EMI)扫描仪,哪里需要它?
如何选择电磁干扰(EMI)扫描仪,看看这几点
lidar激光雷达扫描仪有什么用


泰来三维|如何轻松玩转三维扫描仪中手持快速扫描模式






 工商网监
工商网监
评论