 风速传感器的工作原理_风速传感器安装位置
风速传感器的工作原理_风速传感器安装位置
风速传感器的工作原理
风速传感器是一种可以连续测量风速和风量(风量=风速x横截面积)大小的常见传感器。风速传感器大体上分为机械式(主要有螺旋桨式、风杯式)风速传感器、热风式风速传感器、皮托管风速传感器和基于声学原理的超声波风速传感器。
一、螺旋桨式风速传感器工作原理
我们知道电扇由电动机带动风扇叶片旋转,在叶片前后产生一个压力差,推动气流流动。螺旋浆式风速计的工作原理恰好与此相反,对准气流的叶片系统受到风压的作用,产生一定的扭力矩使叶片系统旋转。通常螺旋桨式速传感器通过一组三叶或四叶螺旋桨绕水平轴旋转来测量风速,螺旋桨一般装在一个风标的前部,使其旋转平面始终正对风的来向,它的转速正比于风速。
二、风杯式风速传感器工作原理
风杯式风速传感器,是一种十分常见的风速传感器,最早由英国鲁宾孙发明。感应部分是由三个或四个圆锥形或半球形的空杯组成。空心杯壳固定在互成120°的三叉星形支架上或互成90°的十字形支架上,杯的凹面顺着一个方向排列,整个横臂架则固定在一根垂直的旋转轴上。
当风从左方吹来时,风杯1与风向平行,风对风杯1的压力在最直于风杯轴方向上的分力近似为零。风杯2与3同风向成60度角相交,对风杯2而言,其凹面迎着风,承受的风压最大;风杯3其凸面迎风,风的绕流作用使其所受风压比风杯2小,由于风杯2与风杯3在垂直于风杯轴方向上的压力差,而使风杯开始顺时针方向旋转,风速越大,起始的压力差越大,产生的加速度越大,风杯转动越快。
风杯开始转动后,由于杯2顺着风的方向转动,受风的压力相对减小,而杯3迎着风以同样的速度转动,所受风压相对增大,风压差不断减小,经过一段时间后(风速不变时),作用在三个风杯上的分压差为零时,风杯就变作匀速转动。这样根据风杯的转速(每秒钟转的圈数)就可以确定风速的大小。
当风杯转动时,带动同轴的多齿截光盘或磁棒转动,通过电路得到与风杯转速成正比的脉冲信号,该脉冲信号由计数器计数,经换算后就能得出实际风速值。目前新型转杯风速表均是采用三杯的,并且锥形杯的性能比半球形的好,当风速增加时转杯能迅速增加转速,以适应气流速度,风速减小时,由于惯性影响,转速却不能立即下降,旋转式风速表在阵性风里指示的风速一般是偏高的成为过高效应(产生的平均误差约为10%)
三、热式风速传感器工作原理
热式风速传感器以热丝(钨丝或铂丝) 或是以热膜(铂或铬制成薄膜) 为探头,裸露在被测空气,并将它接入惠斯顿电桥,通过惠斯顿电桥的电阻或电流的平衡关系,检测出被测截面空气的流速。热膜式风速传感器的热膜外涂有极薄 的石英膜绝缘层,以便和流体绝缘,并可防止污染,可在带有颗粒的气流中工作,其强度比金属热线丝高。
当空气温度稳定不变时,热丝上的耗电功率等于热丝在空气中瞬时耗去的热量。热丝电阻随温度而变化,热线的电阻和热线温度在通常温度范围(0~300 ℃) 之内,表现为线性关系。放热系数与气流速度有关,流速越大,对应的放热系数也越大,即散热快;流速小,则散热慢。
热式风速传感器所测气流速度是电流与电阻的函数。将电流(或电阻) 保持不变,所测气流速度仅与电阻(或电流) 一一对应。
热线式风速传感器有恒流与恒温两种设计电路。恒温式热线风速传感器较为常用。恒温法原理是测量过程中保持热丝温度恒定,使电桥平衡,此时热丝电阻保持不变,气流速度只是电流的单值函数,根据已知的气流速度与电流的关系可求得通过末端装置的气流速度。恒流式热线风速传感器在测量过程中保持流经热丝的电流值不变。当电流值不变时,气流速度仅仅与热丝电阻有关。根据已知的气流速度与热丝电阻的关系可求得通过风速传感器的气流速度。
热线式风速传感器可测量脉动风速。恒流式风速传感器热惯性较大,恒温式风速传感器的热惯性相对较小,具有较高的速度响应。热线式风速传感器的测量精度均不很高, 使用时要注意温度补偿。
四、皮托管风速传感器工作原理
皮托管,又名“空速管”,“风速管”,是测量气流总压和静压以确定气流速度的一种管状装置,由法国H.皮托发明而得名。
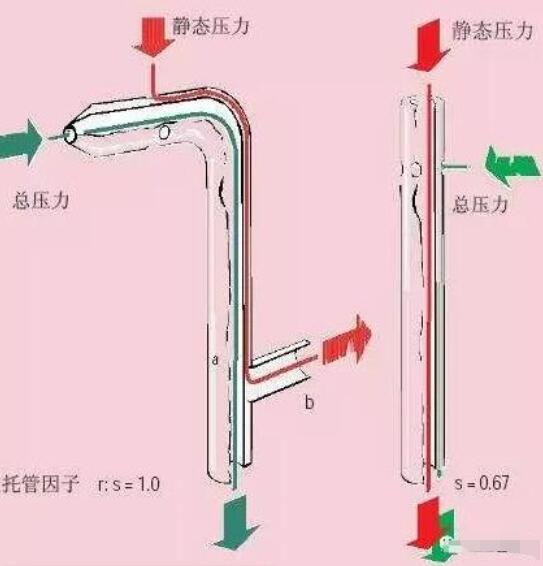
用实验方法直接测量气流的速度比较困难,但气流的压力则可以用测压计方便地测出。它主要是用来测量飞机速度的,同时还兼具其他多种功能。因此,可用皮托管测量压力,再应用伯努利定理算出气流的速度。皮托管由一个圆头的双层套管组成(见图),外套管直径为D,在圆头中心O处开一与内套管相连的总压孔,联接测压计的一头,孔的直径为0.3~0.6D。在外套管侧表面距O约3~8D的C处沿周向均匀地开一排与外管壁垂直的静压孔,联接测压计另一头,将皮托管安放在欲测速度的定常气流中,使管轴与气流的方向一致,管子前缘对着来流。当气流接近O点处,其流速逐渐减低,流至O点滞止为零。所以O点测出的是总压P。其次,由于管子很细,C点距O点充分远,因此C点处的速度和压力已经基本上恢复到同来流速度V和压力P相等的数值,因而在C点测出的是静压。对于低速流动(流体可近似地认为是不可压缩的),由伯努利定理得确定流速的公式为:
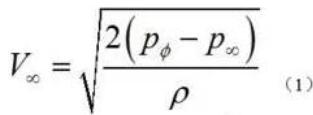
根据测压计测出的总压和静压差P-P,以及流体的密 度ρ,可以按照式(1)求出气流的速度。
五、超声波风速传感器工作原理
超声波风速传感器的工作原理是利用超声波时差法来实现风速的测量。由于声音在空气中的传播速度,会和风向上的气流速度叠加。假如超声波的传播方向与风向相同,那么它的速度会加快;反之,若超声波的传播方向若与风向相反,那么它的速度会变慢。所以,在固定的检测条件下,超声波在空气中传播的速度可以和风速函数对应。 通过计算即可得到精确的风速和风向。由于声波在空气中传播时,它的速度受温度的影响很大;风速传感器检测两个通道上的两个相反方向,因此温度对声波速度产生的影响可以忽略不计。
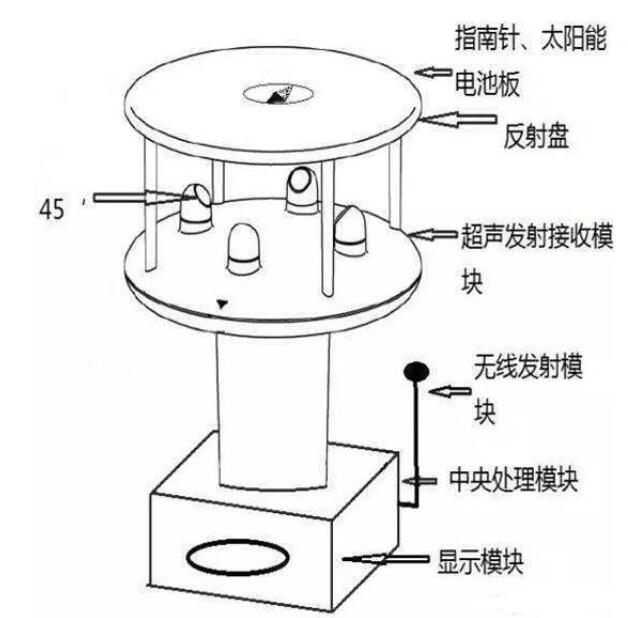
超声波风速传感器它具有重量轻、没有任何移动部件、坚固耐用的特点, 而且不需维护和现场校准,能同时输出风速和风向。客户可根据需要选择风速单位、 输出频率及输出格式。也可根据需要选择加热装置(在冰冷环境下推荐使用)或模拟输出。可以与电脑、数据采集器或其它具有RS485或模拟输出相符合的采集设备连用。如果需要,也可以多台组成一个网络进行使用。
超声波风速风向仪是一种较为先进的测量风速风向的仪器。 由于它很好地克服了机械式风速风向仪固有的缺陷, 因而能全天候地、长久地正常工作,越来越广泛地得到使用。它将是机械式风速仪的强有力替代品。
风速传感器安装位置
风速传感器需需要固定在横臂上并安装在气杆上。存在许多类型的风撑杆,并且通常操作可通过连接三个金属管放置的普通类型的可跌落测试杆。安装在横臂两端的气缸上方的七芯跟十二针插头分别用于连接风速传感器跟风速传感器。在十字臂一端的气缸下方放置一个十二芯电缆插头,用于连接集电极的十二芯风向电缆。
-
传感器
+关注
关注
2557文章
51728浏览量
758787 -
风速传感器
+关注
关注
2文章
72浏览量
21581
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论