 2轮自平衡机器人的制作
2轮自平衡机器人的制作
步骤1:购物清单
乐高(兼容)零件
直流电动机
Arduino Clone
MPU-6050
Motor Shield L298N
电池
跳线20cm母对公
JST连接器
*车轮
*(其中一个我以前建立的配置中,我设法烧掉了其中一个电动机,
因此我放弃了电动机,保持了车轮的位置)
2个扎带
步骤2:使用一些乐高(兼容)零件构建框架



这是一个非常简单的任务。我相信,如果乐高(Lego)开始制造套件(像这样),将砖块与最新的电子产品混合在一起,它们的销售(现在正在做)会做得更好。
无论如何,请注意,我将Arduino Uno的Lego平台移到了更高的位置,以改善反摆的效果。
要安装马达,请在底座上开4个孔,并用一条扎带(每个马达)
我加了一点胶水,以确保电机不会移动。
第3步:接线图和编码
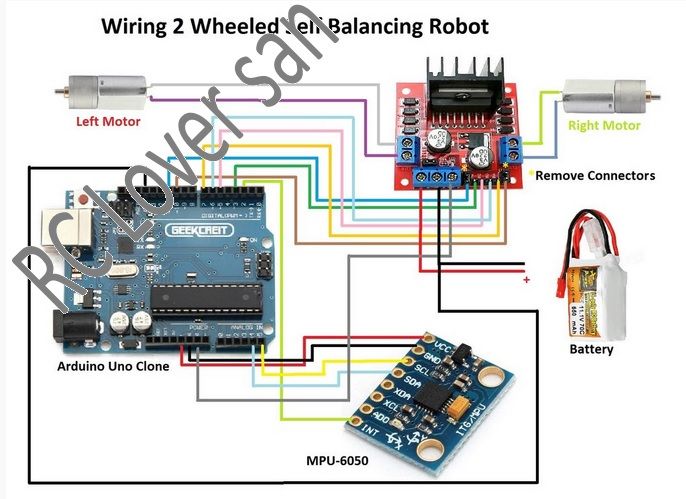
按照上面的示意图,连接到Arduino Uno克隆,电动机屏蔽罩L298N,MPU-6050和电池。
关于编码,您得益于Kalman滤波器和PID(比例,积分和微分)控制,可以轻松地在Internet上找到该项目的代码,从而提高了机器人的稳定性。
如果找不到它, ,请订阅我的YouTube频道,我会立即发送给您。
步骤4:
恭喜,您已经构建了两轮自平衡机器人!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28466浏览量
207308
发布评论请先 登录
相关推荐
人形机器人“造车”,车企扎堆布局!
人形机器人率先落地于汽车制造应用已被看好,这将加速人形机器人的商用进程。 图源:广汽集团 广汽 GoMate 多项零部件自研 GoMate是一款全尺寸的轮足人形

【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大模型存在
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
重要。
书中还详细介绍了支持具身智能机器人的核心技术系统,包括自主机器人计算系统、感知系统、定位系统及规划和控制系统。
本书共分5个部分。
第1部分(第1章和第2章)介绍具身智能机器人
发表于 12-28 21:12
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
学习并优化自己的行为,以更好地服务家庭成员。
具身智能的发展如何?
近年来,具身智能机器人的发展呈现出强劲势头,尤其是在智能化和自主决策能力方面。
自 2010 年以来,具身智能机器人已经从简单模仿人类
发表于 11-11 10:20
七腾机器人:防爆轮式机器人-四轮八驱全新上线
今日,七腾机器人有限公司(以下简称“七腾机器人”)推出全新产品:防爆轮式机器人-四轮八驱。该款产品是七腾轮式巡检机器人产品系列的最新成员,防

开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50
维顶机器人获得B轮融资
维顶机器人,一家深耕智能装备制造领域,以机器人应用为核心,致力于为客户提供全方位自动化解决方案的高新技术企业,近日宣布成功完成B轮融资。本轮融资的具体金额虽未对外披露,但吸引了包括沈阳科投在内的多家知名投资机构参与,彰显了资本市
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
钛虎机器人获Pre-A轮融资,加速人形机器人技术研发
高性能一体化旋转电驱领域的创新先锋——钛虎机器人科技(上海)有限公司(简称“钛虎机器人”),近日宣布成功完成数千万元的Pre-A轮融资。本轮融资由知名投资机构经纬创投领投,方富创投和梅花创投共同跟投,标志着钛虎
大象机器人完成Pre-B轮融资,致力打造全新机器人生态!
近日,深圳市大象机器人科技有限公司(以下简称「大象机器人」)近日完成Pre-B轮融资,本轮融资由清辉投资领投、云卓资本跟投,资金将用于人形机器人产线升级及持续研发迭代。义柏资本担任长期
珞石机器人近期宣布成功完成了超5亿元的战略+轮融资
继 2022 年战略轮融资后,新一代智能机器人专家「珞石机器人」近期宣布成功完成了超 5 亿元的战略+轮融资。
「喜报」迈步机器人荣获机器人应用典型案例奖
,荣获机器人应用典型案例奖!第八届深圳机器人年度评选于2023年11月启动,先后经由大众投票,《机器人与智能系统》专业媒体、行业及学界专家多轮评选,从创新技术,商

工业机器人厂商九众九完成天使轮融资
近日,高工机器人获悉,九众九机器人有限公司(下文简称“九众九”)已完成天使轮融资。九众九在接受高工机器人调研时表示,此轮融资资金将主要用于以





 工商网监
工商网监
评论