 四轴飞行器制作图解
四轴飞行器制作图解
第1步:零件
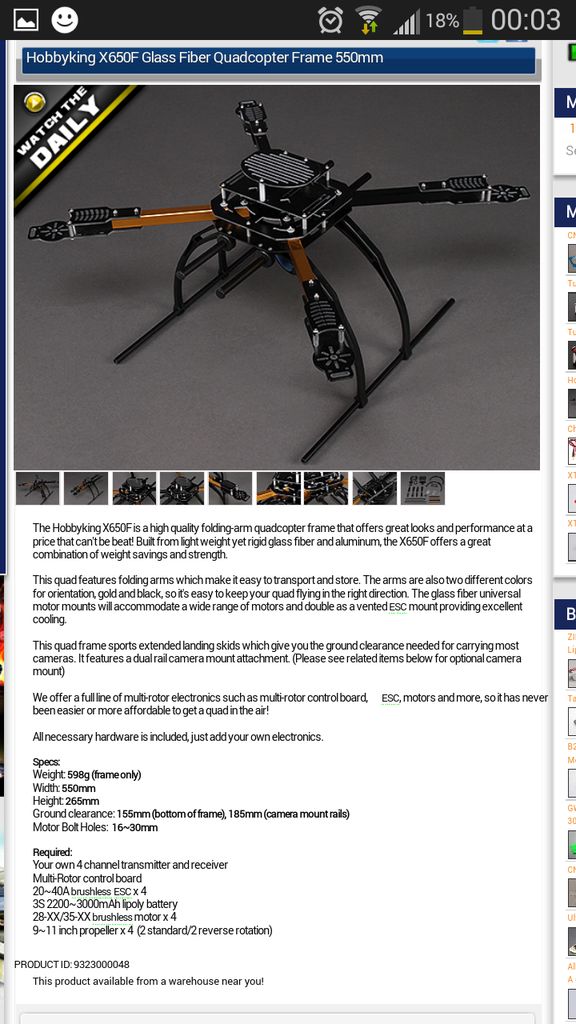
1。 x650f四轴飞行器框架-32.39美元
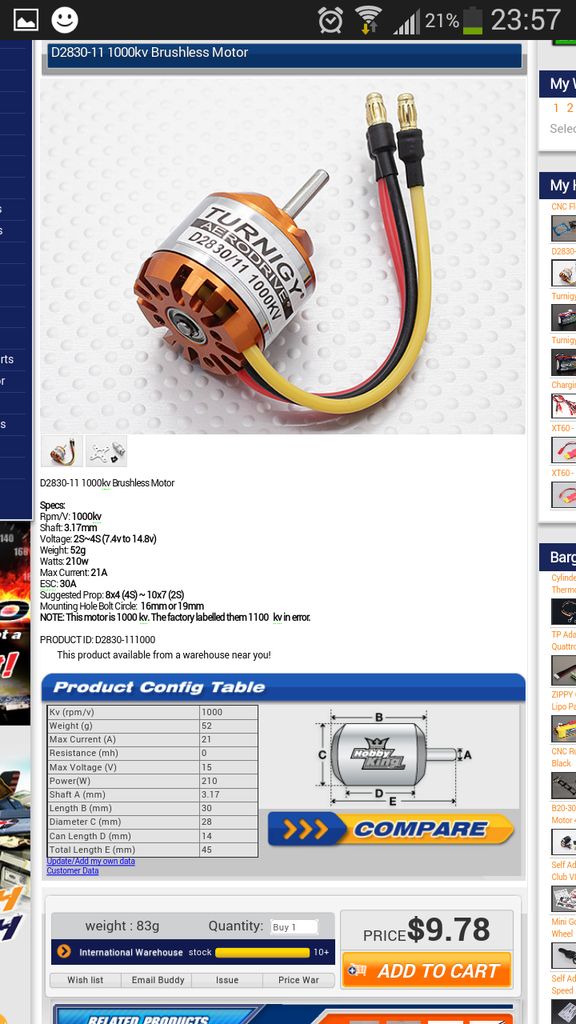
2。 (4)D2830 1000千瓦-9.93美元
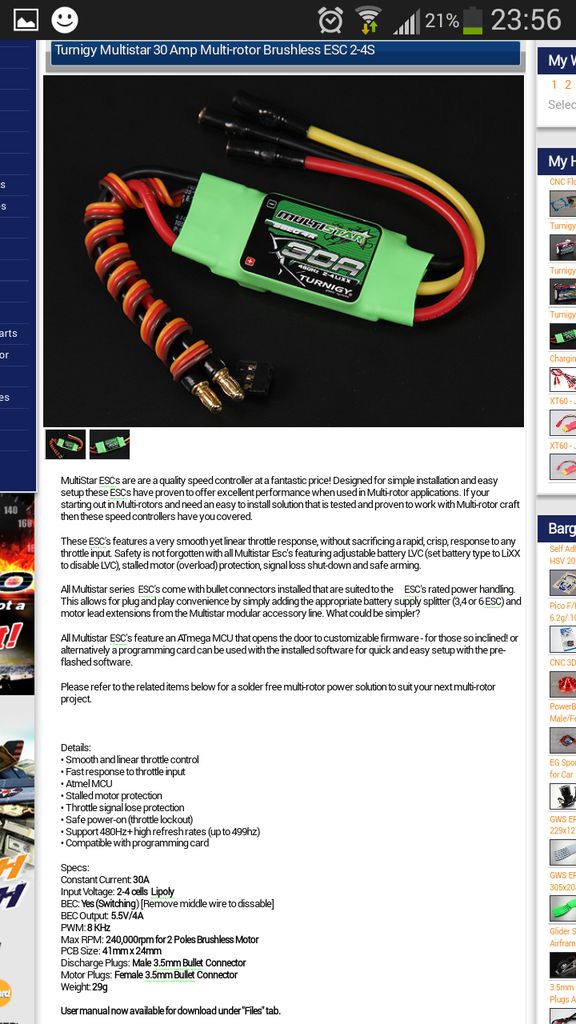
3。 (4)30安培Turnigy esc-12.03美元
4。 APM 2.5.2控制板
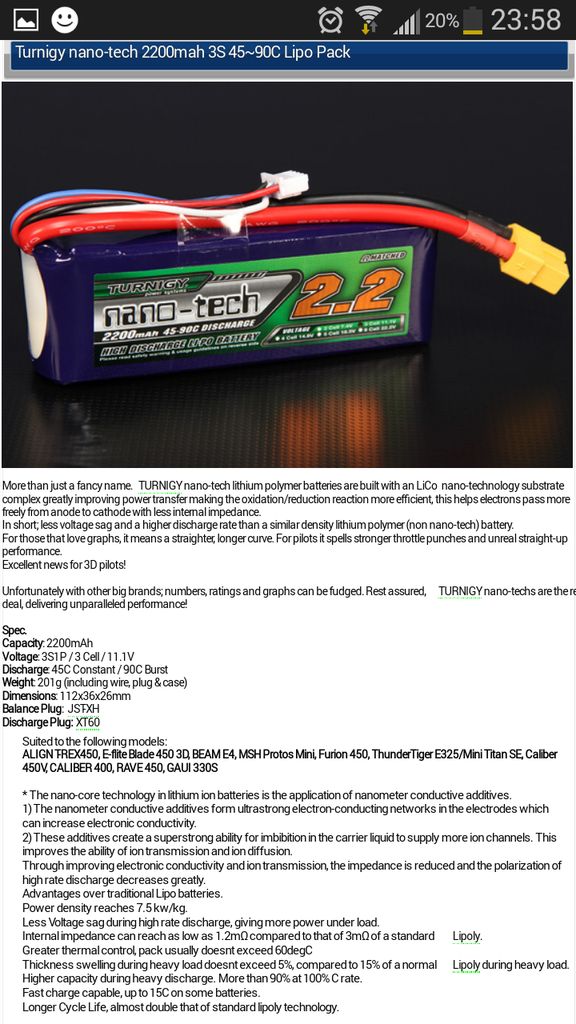
5。 (2或4)3s 2200mah应急电池-$ 19.99
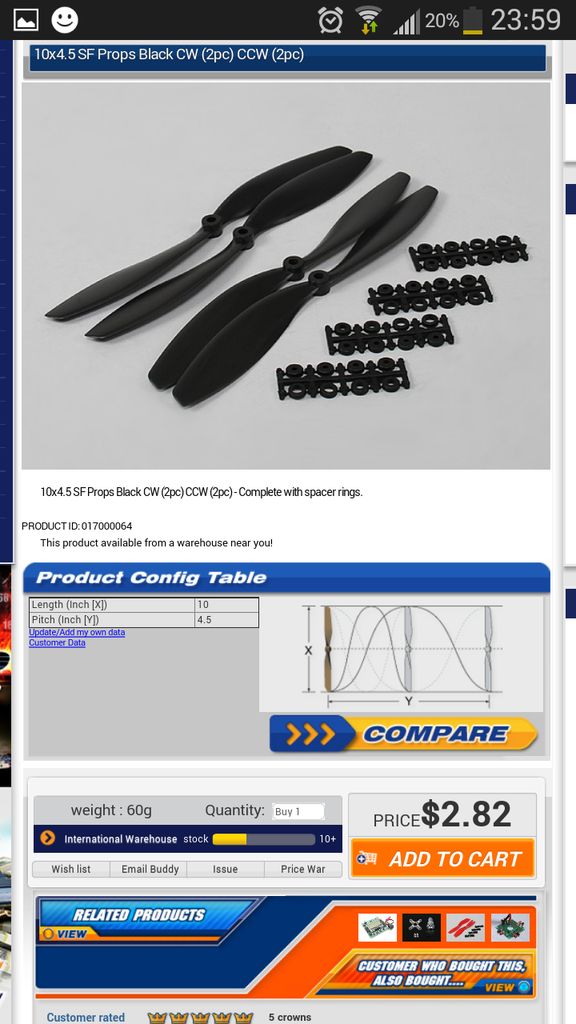
6。 11x4.5黑色道具-$ 3.15
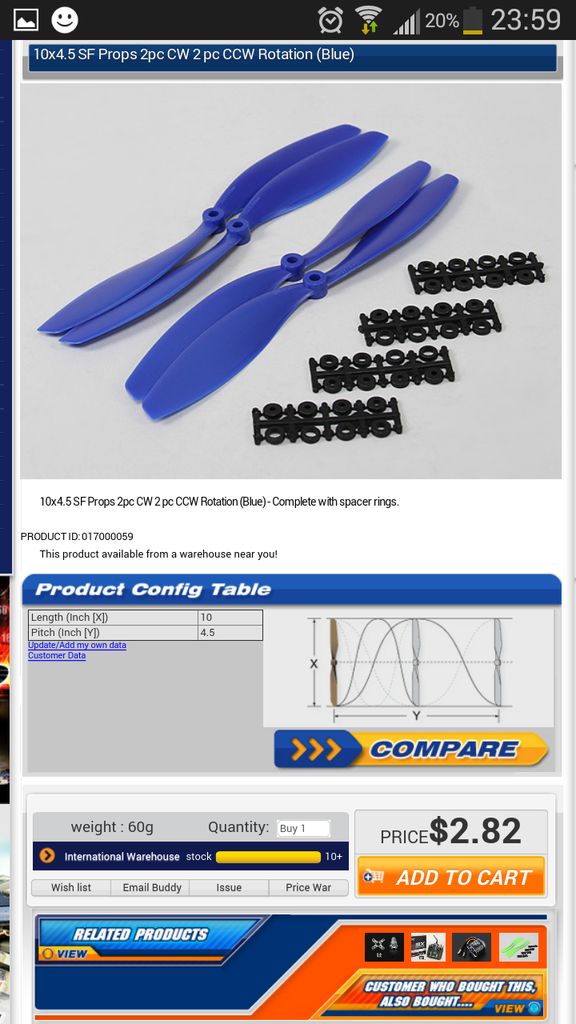
7。 11x4.5蓝色道具-3.15美元
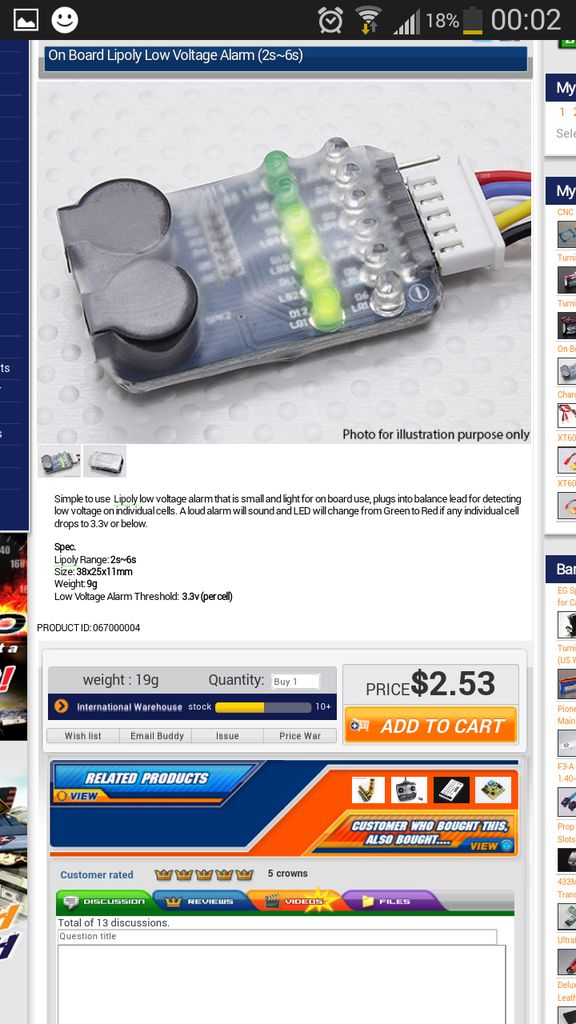
8。电池电压警报-2.66美元
9。 xt60充电线-2.99美元
10。 10x10厘米伺服引线-$ 4.75
11。 xt60到4个3.5毫米子弹-2.90美元
步骤2:放在一起
假设您已经购买了所有零件进行此构建。..
第1步。将所有部件放在没有地毯的桌子上。使用
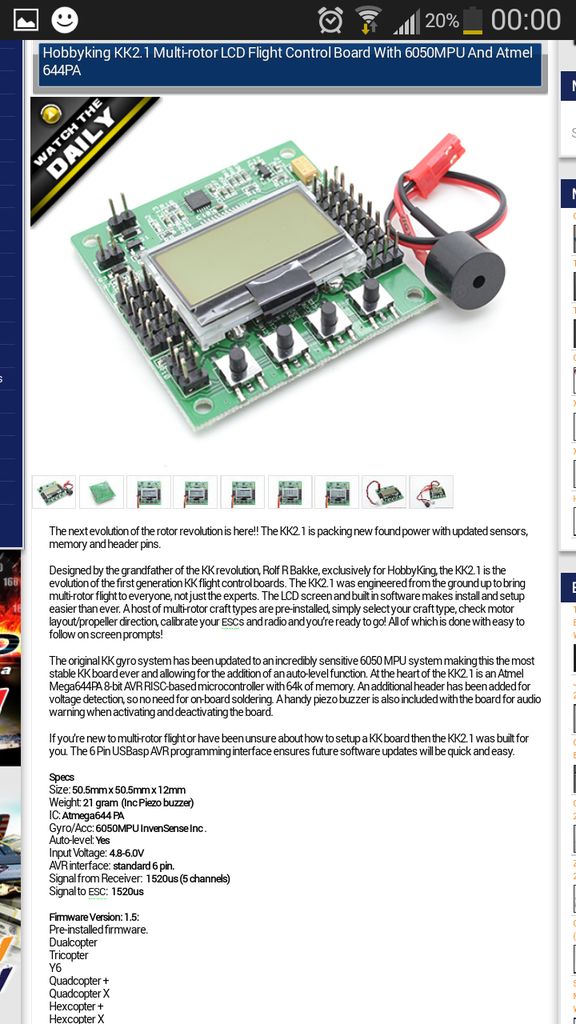
将框架放在一起第3步:更换Kk2.1板
此步骤将需要一些耐心和时间。在kk2.1板上,您将需要进入菜单并更改我上面图片中的所有值。完成后,您将需要对其进行微调。例如,如果四轴飞行器在振荡,则您将需要更改P增益或I增益。正确设置所有值后,您可以返回到面板菜单。每当您准备飞行时,只需打开接收机和四轴飞行器即可。然后将左摇杆移到右下角的位置,并且板上应显示“武装”。您现在可以飞行了!
我现在有一个带有gps的apm 2.5.2主板。这样,我可以将坐标输入到板上,它将飞向它们。
步骤4:添加云台
一旦获得了云台,就需要将云台控制器插入计算机并更改值,否则云台会不断振动。一旦正确设置所有值,云台将非常平滑。
责任编辑:wv
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
四轴飞行器
+关注
关注
55文章
206浏览量
51206
发布评论请先 登录
相关推荐
飞行汽车兴起,连接器/线缆将面临哪些挑战?
在科技飞速迭代的当下,飞行汽车与 eVTOL(电动垂直起降飞行器)作为创新型交通载具备受瞩目,承载着人们对未来出行的美好愿景。 虽然二者都致力于突破传统交通模式的限制,但在各方面存在明显差异。连接器
MATLAB在低空飞行器中的应用
在当今科技飞速发展的时代,低空飞行器领域正经历着前所未有的变革与发展。从私人和公共服务到城市和区域空中交通,从观光旅游到大件货物运输,低空飞行器的应用场景日益广泛。随着低空经济向无人化、智能化、协同化、绿色化方向迈进,对低空飞行器

传感器在低空经济中的应用
低空经济的崛起为传感器技术带来了巨大的发展机遇。传感器作为低空飞行器的“眼睛”和“耳朵”,负责收集外部环境的信息,是实现飞行器自主导航、避障、状态监测和数据采集等功能的关键元器件。在低

欣旺达:已具备低空飞行器电池研发生产能力
近日,欣旺达电子股份有限公司(以下简称“欣旺达”)明确表示,公司已经具备了研发和生产低空飞行器电池的能力,并且正在积极与相关的厂商进行对接。 欣旺达作为一家在电池领域具有深厚技术积累的企业,一直
嵌入式学习-飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
身上,用于实时监控机器人的运动和姿态,帮助机器人进行自主导航和姿态控制。2.智能手机和智能手表:六轴传感器可以用于智能手机和智能手表中的计步、运动追踪、手势识别、游戏控制等功能。3.飞行器和无人机:六
发表于 12-02 09:47
飞凌嵌入式ElfBoard ELF 1板卡-运动追踪之六轴传感器使用场景
身上,用于实时监控机器人的运动和姿态,帮助机器人进行自主导航和姿态控制。2.智能手机和智能手表:六轴传感器可以用于智能手机和智能手表中的计步、运动追踪、手势识别、游戏控制等功能。3.飞行器和无人机:六
发表于 11-29 08:57
开源项目!DIY了一台无人机,用全志T113芯片
这款使用全志T113-S3处理器制作的PX4飞控整体硬件设计并不复杂,飞控板载主控、IMU、磁力计、气压计以及其它常见的元件,并由T113直接输出PWM控制飞行器,并使用1路ADC来采集电池的电压
发表于 10-22 13:50
利用图像处理板避障 让小型飞行器像昆虫一样灵巧
许多小型化的飞行器类似于昆虫,凭借其机动、灵活、体积小的特点能够在复杂的环境中执行飞行任务。但是再精细化的操控,也难以做到完全避免障碍物的阻碍,因此可以采用AI图像处理板来辅助避障。AI避障中很重

中科宇航研发太空旅行飞行器,预计2028年开展太空边缘载人旅游
据南方+、金羊网报道,近日中科宇航宣布,已启动太空旅游飞行器研究工作,预计于2027年首次试飞,2028年正式开展载人太空边缘旅游项目。
上海峰飞航空领先全球低空飞行器领域,展望2040年
eVTOL(Electric Vertical Take-Off and Landing)是一种电力驱动的垂直起降飞行器,常被誉为“飞行汽车”,主要满足城市内、城市间的短途飞行需求。
基于非线性自适应学习控制器的四轴飞行器避障方案
这篇文章的基本原理是通过设计一种新颖的非线性自适应学习控制器,用于快递四轴飞行器的障碍物避免轨迹控制问题。该控制器结合了非线性可变增益(NL
发表于 04-10 12:39
•487次阅读
传感器融合的工作原理
你怎么知道你在哪里?什么是真实的?这是传感器融合应该回答的问题。不是以哲学的方式,而是字面上的“我会自动撞入白宫吗?因为我被告知不要这样做”,这种方式内置于商业四轴飞行器的固件中。
发表于 04-04 13:11
•718次阅读
什么是姿态传感器MPU6050
MPU6050是6轴运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。使用它就是为了
发表于 02-15 10:53
•3874次阅读





 工商网监
工商网监
评论