 盲人触觉手套DIY图解
盲人触觉手套DIY图解
步骤1:耗材列表
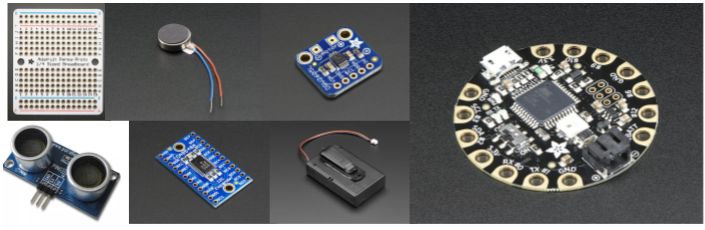
电子:
-#1201:振动微型电机盘-ERM(x4)[$ 1.95 ea。]
- #2305:Adafruit DRV2605L触觉电机控制器(x4)[每个$ 7.95]
-#659:FLORA-可穿戴电子平台-Arduino兼容[$ 14.95]
-HC-SR04超声波距离传感器(x2)[每件$ 2.99]
-#2717:TCA9548A I2C多路复用器[$ 6.95]
-#3287:3节AA电池座,带JST连接器[$ 2.95]
-#1608:Adafruit Perma-Proto四分之一面包板PCB-单[$ 2.95]
-带状电缆
-200和220欧姆电阻器
制造:
-魔术贴[$ 2.98]
-#615:针组-3/9尺寸-20针[$ 1.95]
-氯丁橡胶或其他任何耐用的面料
总费用:78.31美元
大多数组件ts是从Adafruit.com购买的
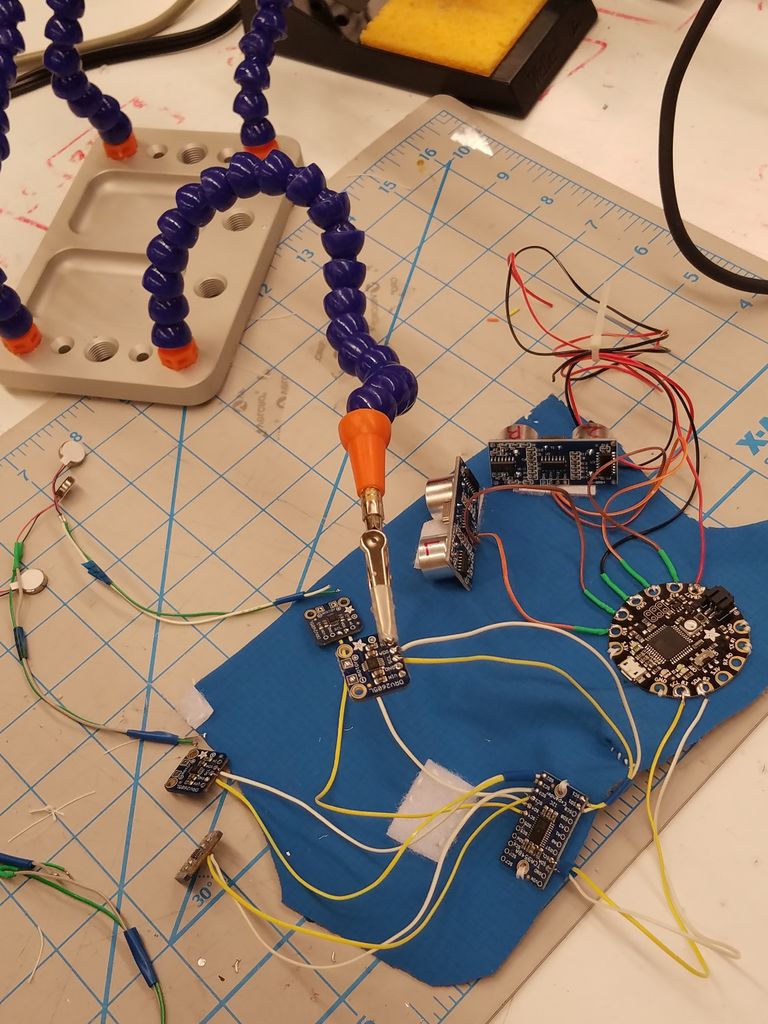
步骤2:试验板
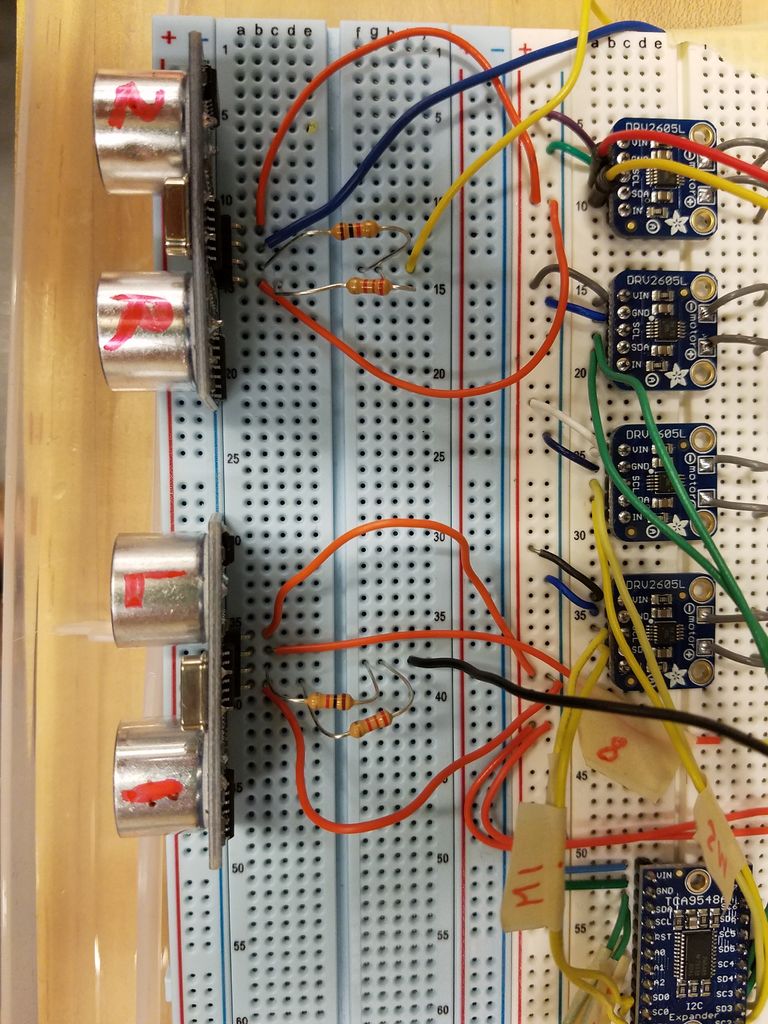
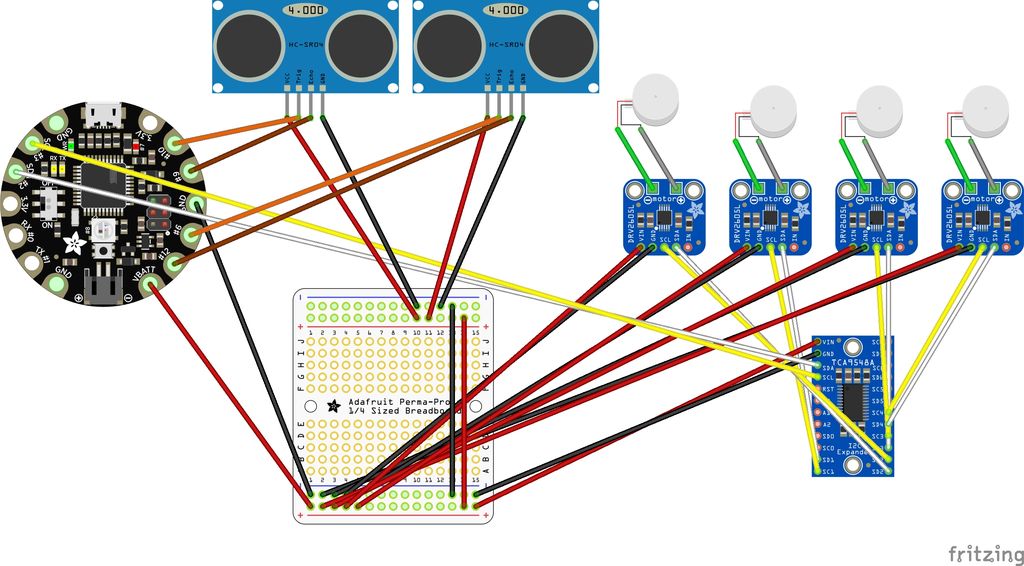
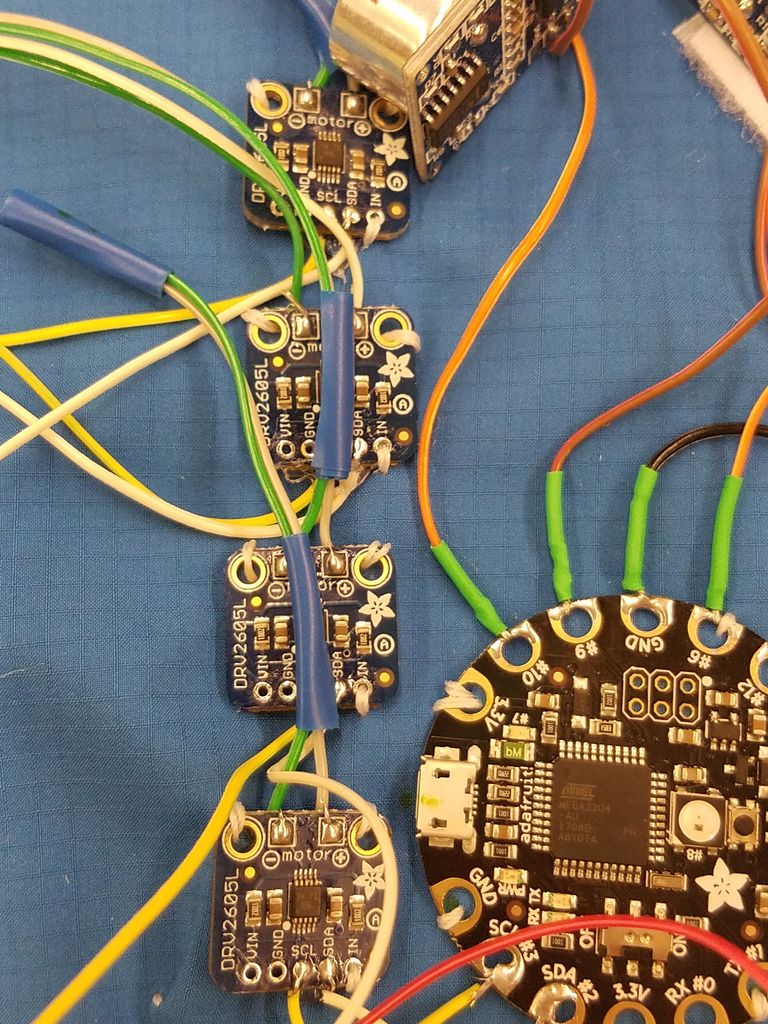
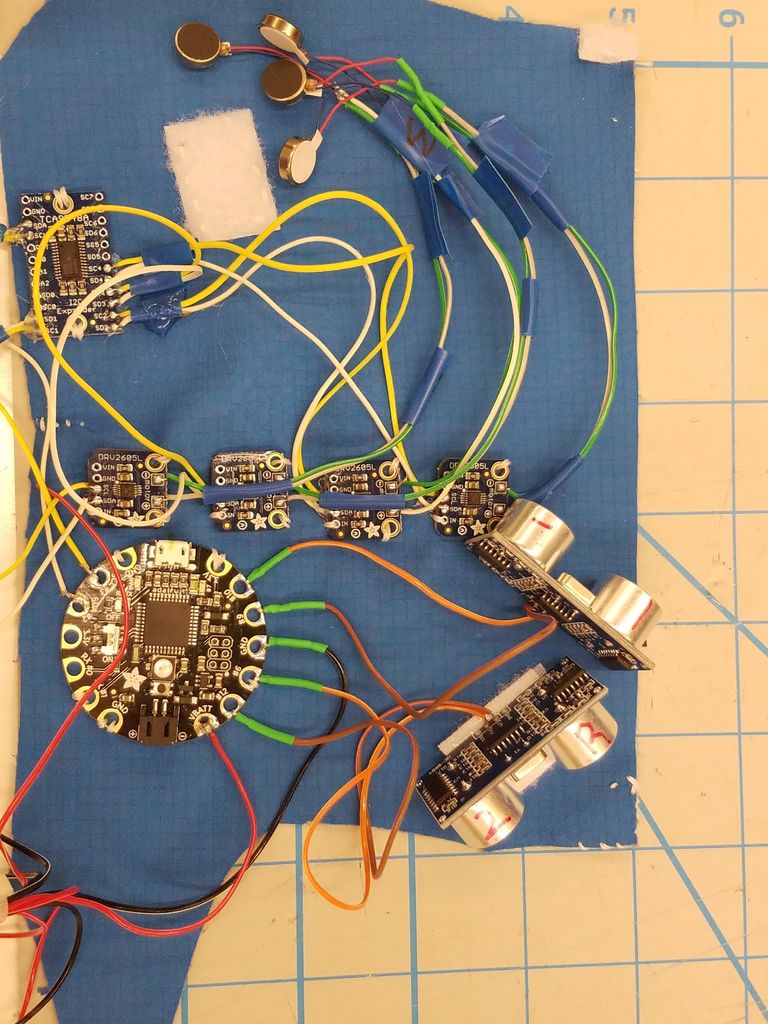
第一步是连接所有组件都使用面包板,以便在将它们固定到最终产品上之前确保它们均正常工作。以下电路图和图像可让您大致了解所有连接位置。以下是每个组件的功能细分:
Arduino Uno/FLORA
这是微控制器,它是可编程的部分。它还从电池为所有组件供电。最初,我将所有东西都连接到Arduino Uno,因为它有5v的电源,但是后来用FLORA和3节AA电池(4.5v)代替了它。
触觉电机控制器
这些控制器直接连接到每个振动电机,并允许您彼此独立地编程每个振动电机,同时还具有包括预先确定的振动效果库的优点。这些对于手套的功能并不重要,但是由于您无需从头开始编程自己的振动模式,因此使编程变得容易得多。
多工器
这只是一种扩展器,因为FLORA上没有足够的SCL/SDA引脚来容纳所有触觉电机控制器。通过为每个触觉电机控制器分配一个唯一的地址,它还允许您独立地与每个触觉电机控制器进行通信。
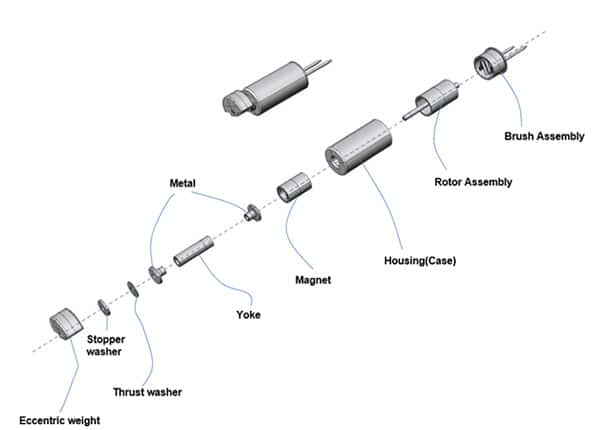
振动电机
这些为用户提供了触觉反馈。它们以某些模式振动,具体取决于您如何编程。有关它们在这里如何工作的更多信息。
超声波传感器
这些传感器用于测量物体前方的距离。他们通过发出“触发”信号来做到这一点,该信号从附近的任何物体弹起并作为“回波”信号返回。然后,程序可以解释延迟时间并计算近似距离。确保将它们分别标记为“左”和“右”,以免日后混淆。
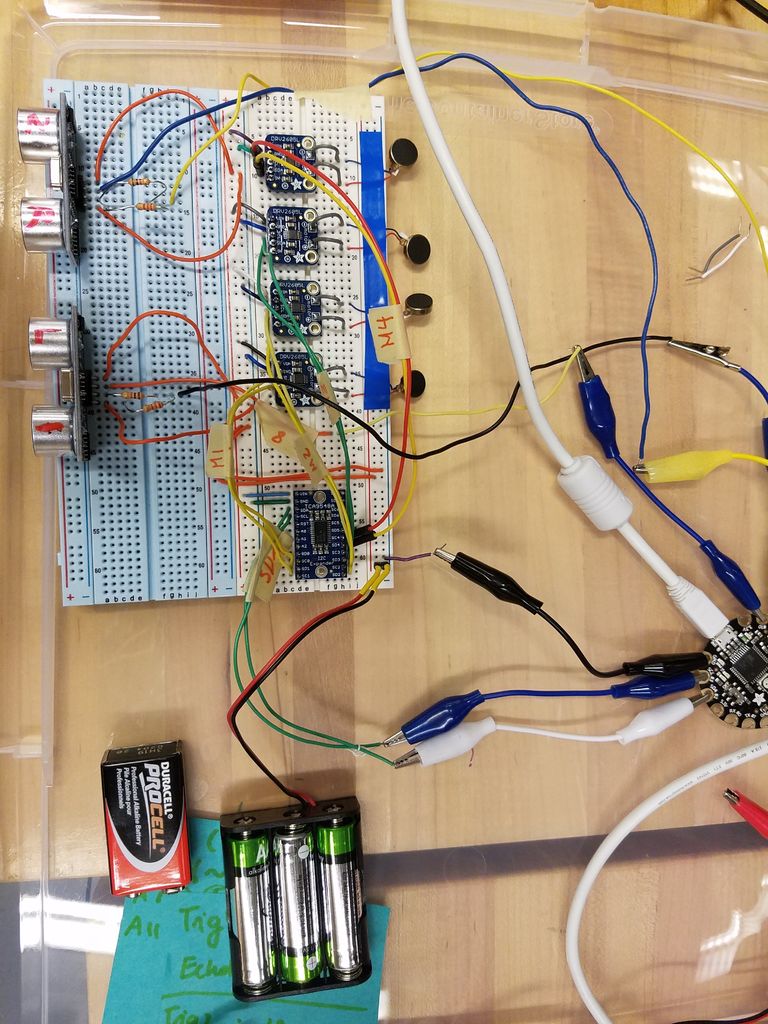
第3步:编码
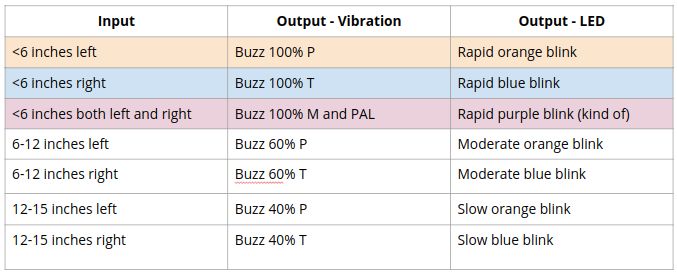
现在,一切都已连接,您可以将代码下载到您的FLORA并进行测试。下载下面的文件和必要的库(在下面链接)。该示例代码具有上表中列出的功能。
要测试该代码,请在距离右侧超声波传感器不到6英寸的地方放置一个大的扁平物体。板载RBG应该快速闪烁蓝色。当您将对象移到更远的位置时,闪烁的速度会变慢。同时,当距离物体不到6英寸时,其中一个振动电机(稍后将放在拇指上)将迅速振动,并随着您将物体移开的距离越来越小而开始振动。左超声波传感器应该保持相同的模式,只是橙色而不是蓝色
我添加了一个附加功能,即RBG应该闪烁粉红色,而中指和手掌振动传感器应该闪烁当两个传感器都检测到距离小于6英寸的物体时,振动。但是,此功能不是很可靠。我将中指和手掌振动电机保留在最终设计中,以防人们想为它们提供更具创造性的功能。
*请勿* 插入FLORA板在仍然连接外部电池的情况下,通过usb进入计算机!始终先从外部电池上拔下它。
*之前* 下载此处提供的示例代码,您将需要下载以下库/驱动程序:
HTTPS://learn.adafruit.com/adafruit-arduino-ide-se 。..
HTTPS://github.com/adafruit/Adafruit_DRV2605_Libra 。..
HTTPS ://github.com/adafruit/Adafruit_NeoPixel
如果代码似乎未在运行或者您的传感器/电机没有响应:
-确保已选择
-确保振动马达已完全连接到面包板/触觉马达控制器。连接它们的电线很细,很容易松动。
-再次检查您是否没有混用SCL/SDA电线(多路复用器)或ECHO和TRIG电线(超声波传感器)。
-如果通过USB插入时一切正常,但在连接到外部电池时出现故障,则可能是时候更换新电池了。
- p》
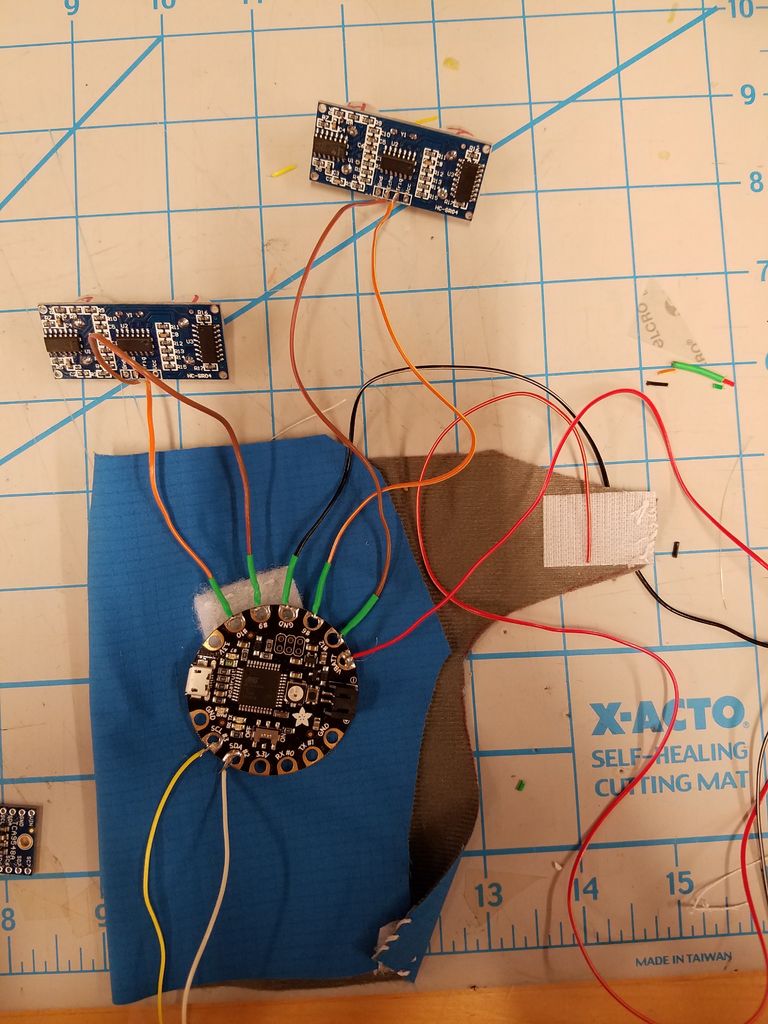
第4步:焊接数据连接
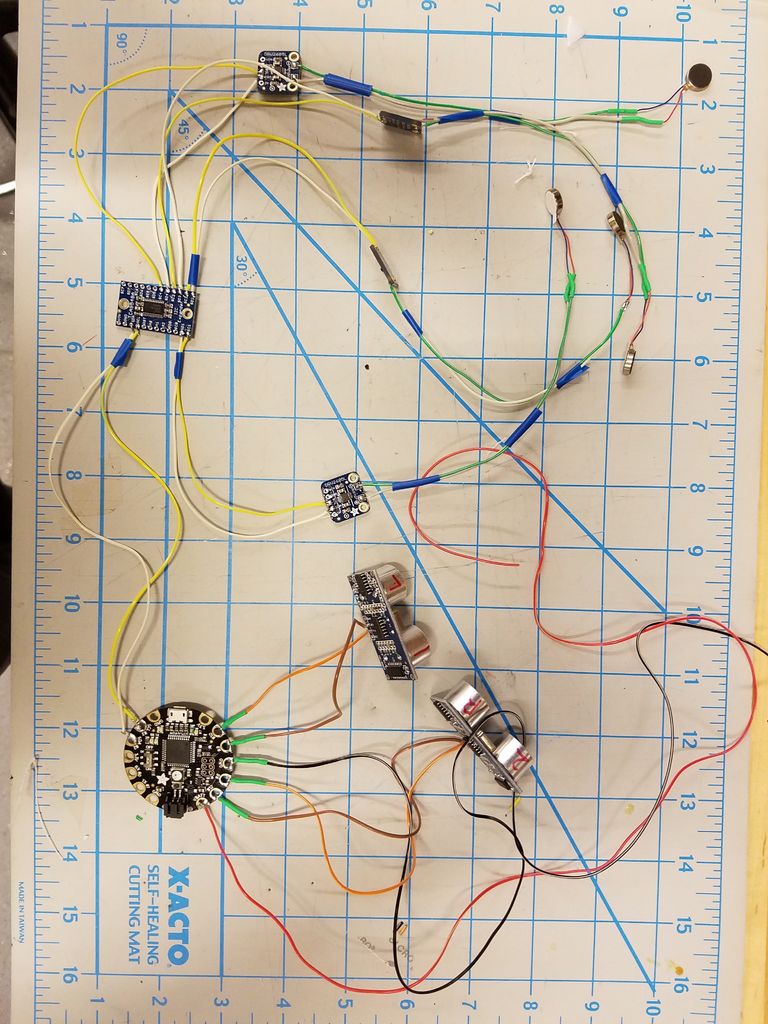
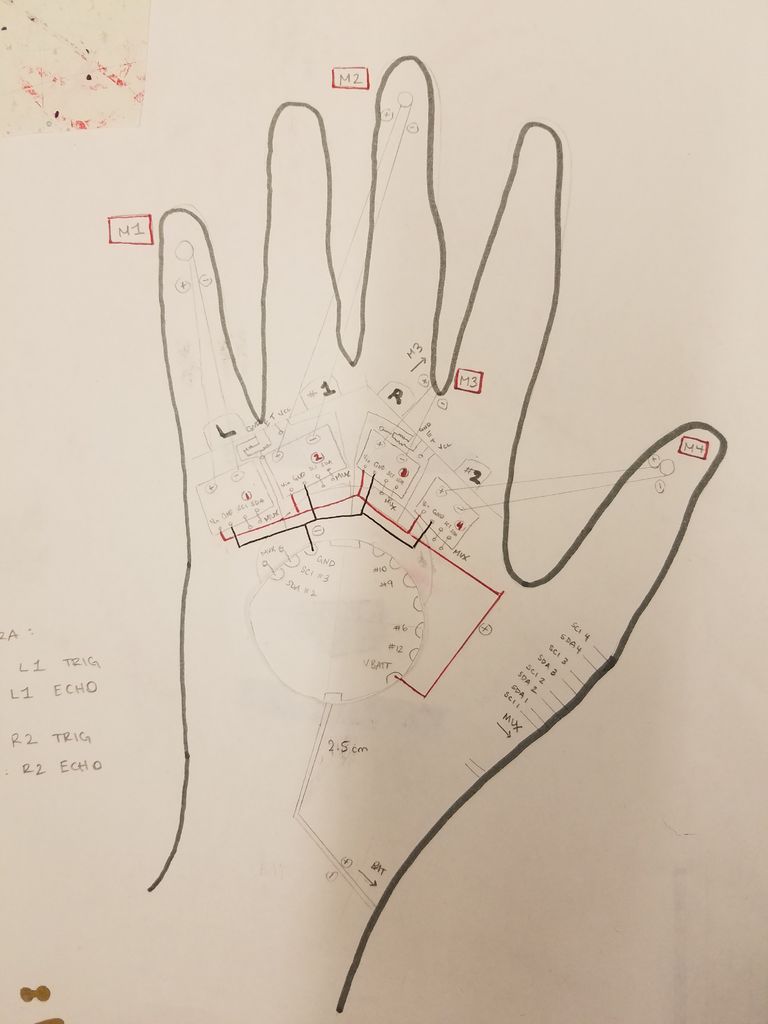
现在确认该代码为开始工作后,您就可以开始组装最终产品了。首先,我要在一只手的轮廓上绘制所有连接,以可视化所有最终连接。我首先关注所有数据连接,然后最后连接电源线和地线。同样在这个阶段,我忘了将电阻器焊接到超声波传感器(oops)的ECHO和GND引脚上,因此它们不在图像中。当我将超声波传感器连接到手套中央的电源“集线器”时,我最终添加了它们。
我首先将所有连接焊接到FLORA,然后逐步通过多路复用器,触觉电机控制器和振动电机。我用热胶,热缩管和电工胶带加强了连接。
在所有图像中,电线颜色对应于以下连接:
红色:电源
黑色:接地
黄色:scl
白色:sda
绿色:电机(-)
灰色:电机( +)
棕色:超声传感器回声
橙色:超声传感器trig
步骤5:制作手套
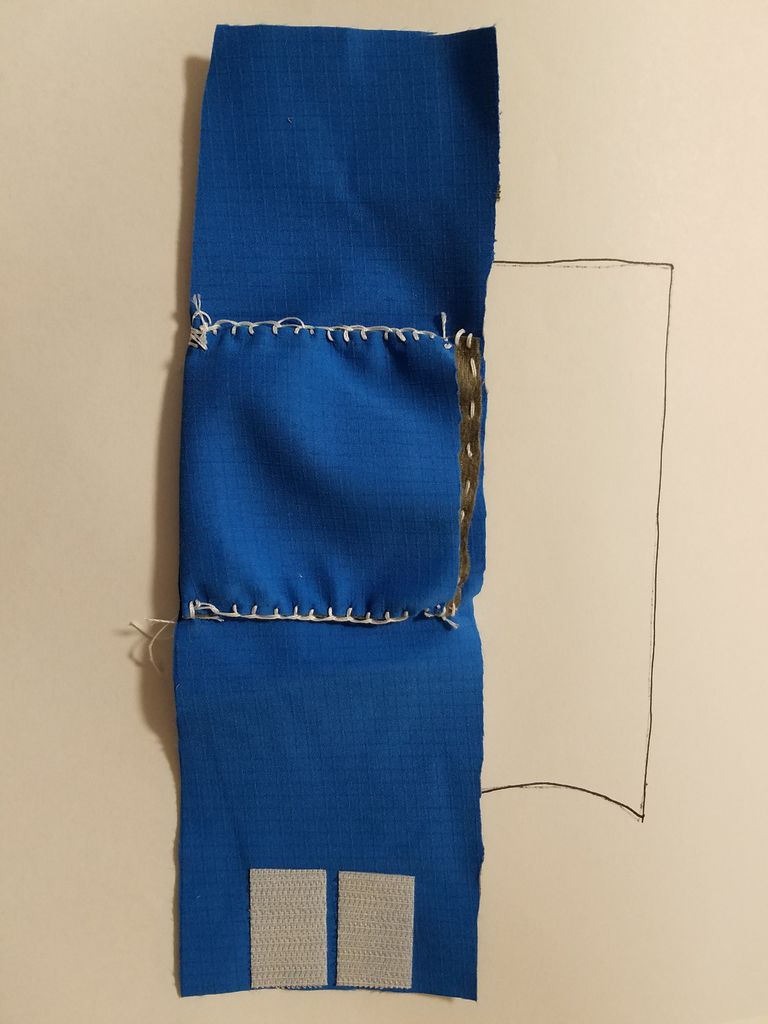
手套由以下组件组成:
-手套主体(其中
-握住手掌的振动)
-3条手指带(细,中,拇指),其中3条振动电机用于握住
-臂带以固定电池组
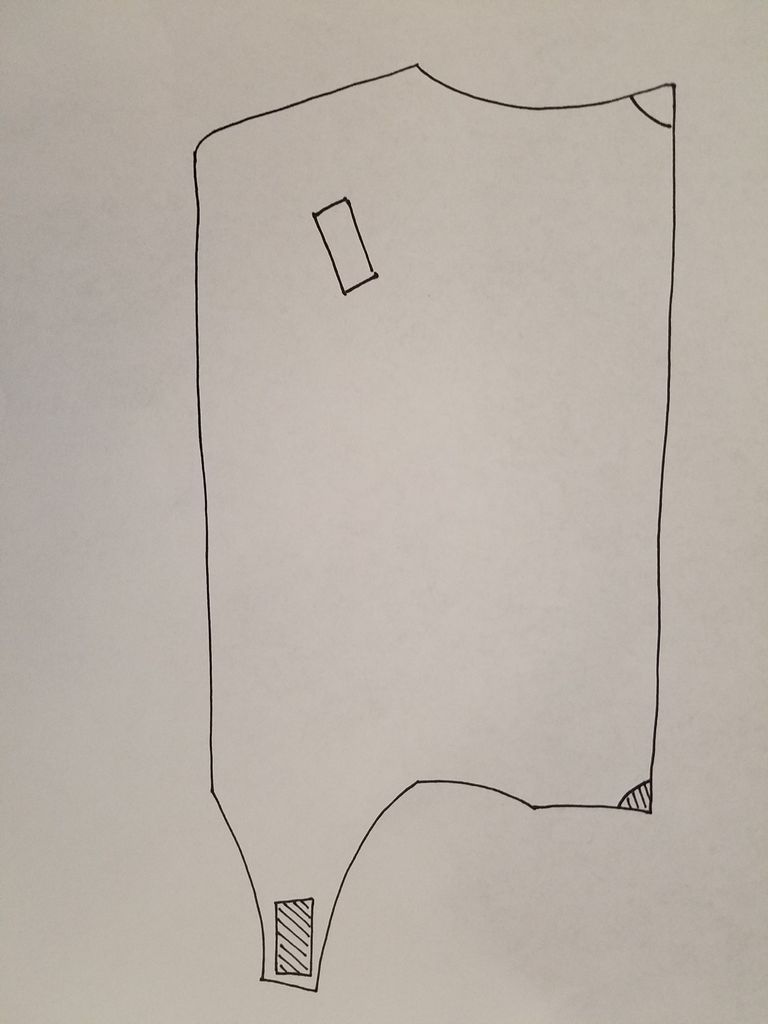
为简单起见,我决定采用无指手套设计,您可以在上面看到常规模板。该草图未按比例绘制,您可能必须调整尺寸以适合您的手。它应该戴在左手上。我首先在某种织物的底面上找出设计,然后用Xacto刀将其剪下。我通过切出足够长的织物条来包裹手指,然后缝上魔术贴皮带以将其固定到位,从而形成手指片。然后,我制作了一些小袋来存放振动电机,并将它们缝在手指带和手套主体下侧中间(手掌附近)的位置。
这种设计需要最少的缝制,并且我只在以下情况下缝制:
-在织物上粘合/加固魔术贴条。
-将振动电机套缝在指带和手套主体上。
-在腕带上构造电池袋。
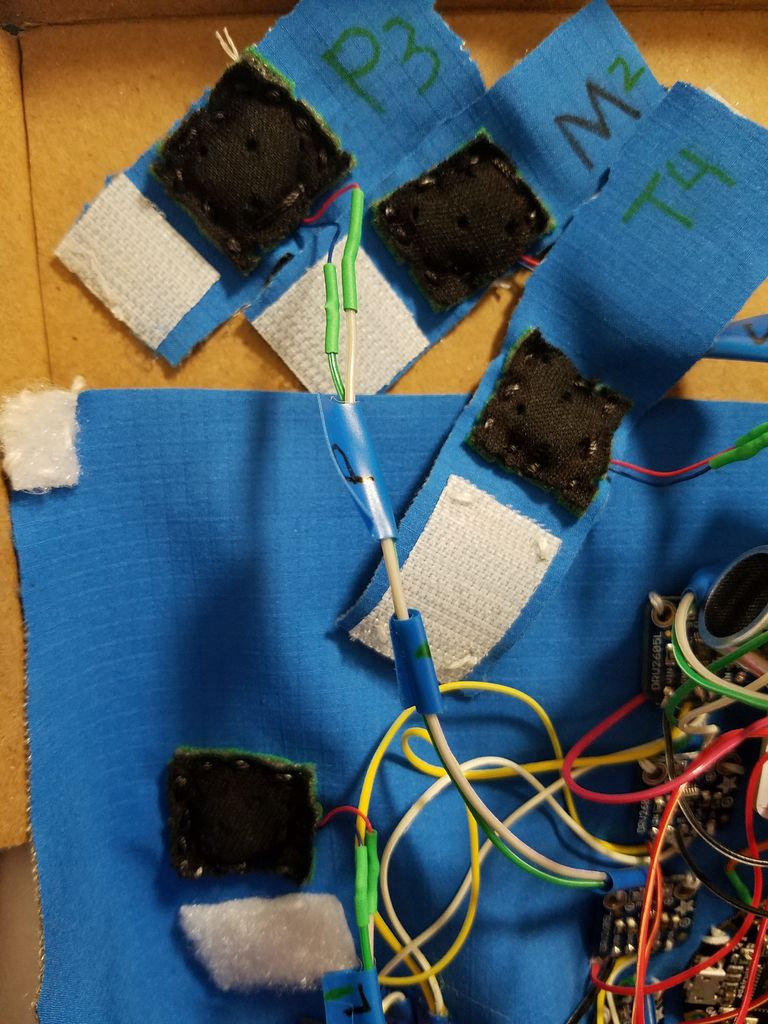
步骤6:Assemby(第1部分)
现在,组装好手套并完成所有布线后,我开始将电气部件粘附到手套上。在这一步中,我遵循了之前制作的图纸并布置了所有零件。然后我开始用麻线缝制它们。我最终将触觉电机控制器放在手套的左侧而不是顶部,因为一旦我开始组装,这种方式就更有意义了。
步骤7:组装(第2部分- PWR + GND)
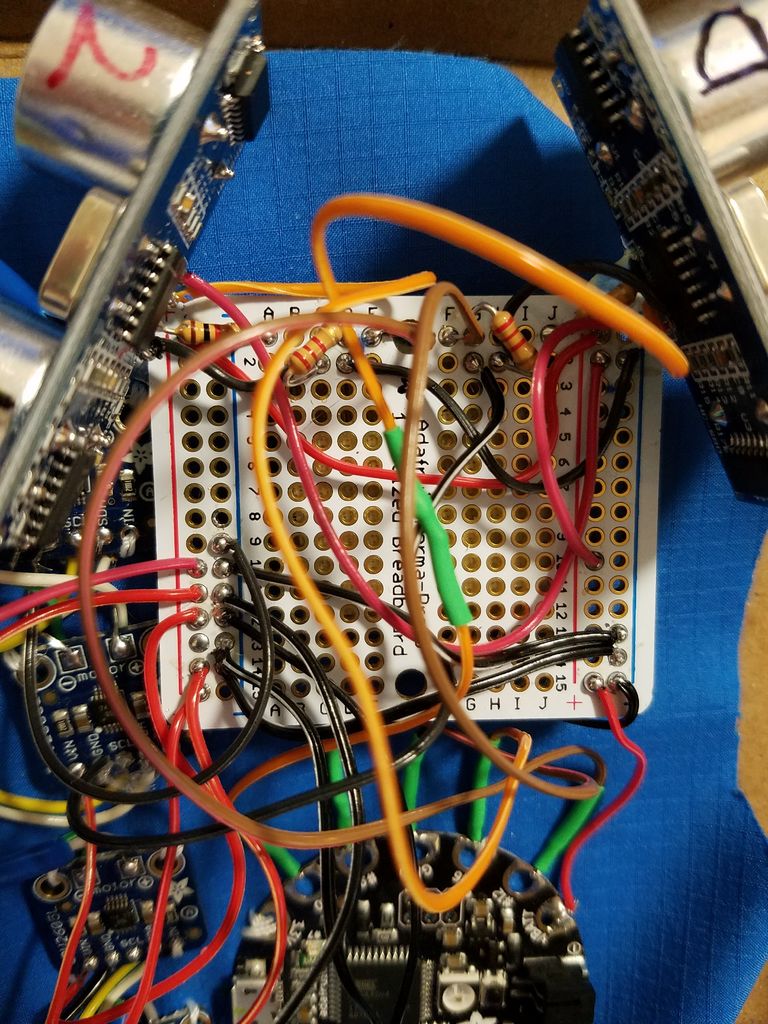
最后,我将所有组件都连接到电源和地。为此,我将小型面包板上的接地和电源导轨连接到了FLORA的gnd和pwr。我将触觉电机控制器和多路复用器连接到这些导轨。然后,我将超声波传感器连接到pwr和gnd,但是还利用了面包板上的额外空间来添加我之前忘记的电阻器。这些电阻是必不可少的,因为它们会产生一个分压器,以降低ECHO信号的电压,该电压会回落到FLORA。
在缝合完所有部件之后,焊接gnd和pwr连接有点不稳定,因此您可能需要先进行所有焊接。我之所以等待,是因为我仍然不确定所有组件的最终布局将是什么。
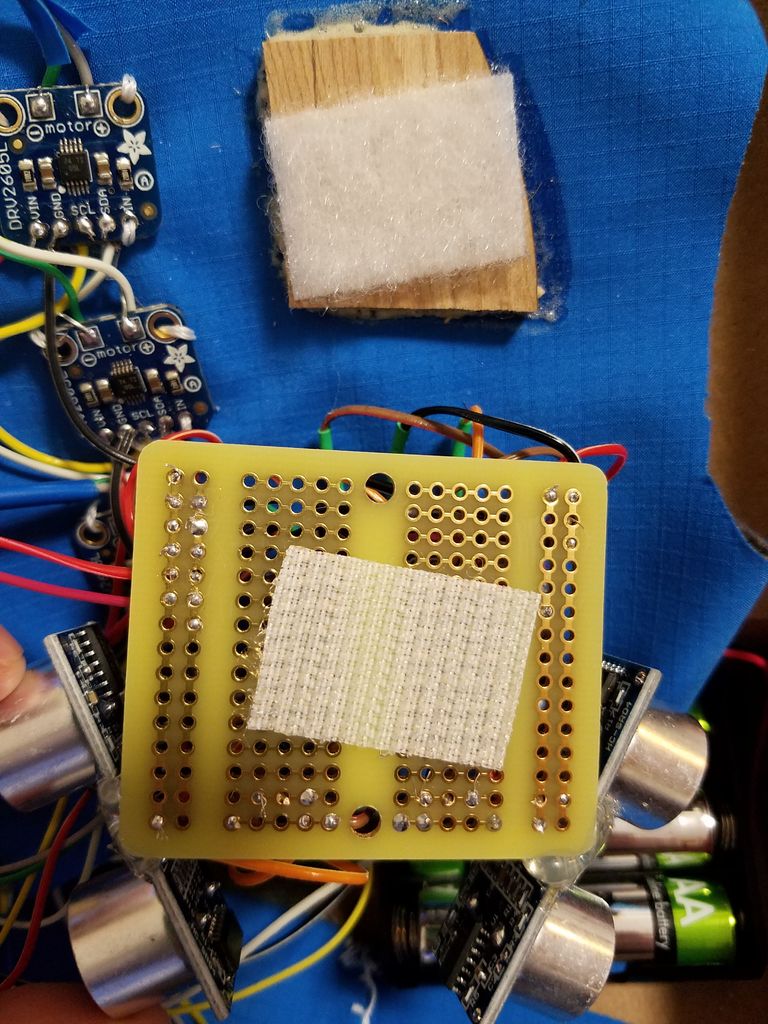
我用一些大猩猩胶将一小块木头粘在手套上来提升面包板,并添加了维可牢尼龙搭扣将面包板粘附到木头上(参见上图)。我这样做是为了可以轻松提起并检查短裤。
最后一步是将超声传感器热粘合到凸起的面包板的任一侧。
然后您就完成了!
-
可穿戴设备
+关注
关注
55文章
3816浏览量
167102
发布评论请先 登录
相关推荐
TITAN Haptics推出DRAKE LFi触觉马达,助力紧凑型设备提升用户体验
触觉传感重磅《Nature》!无线、低功耗、多刺激模式触觉电子皮肤(附原论文)
触觉技术:重塑行业体验与商业价值的创新驱动力
两款氧气传感器在手套箱中的应用


一种HDJS全自动绝缘靴(手套)耐压试验装置使用方法
HDJS-6智能绝缘手套(靴)耐压试验装置的使用手册

HDJS-6绝缘手套(靴)试验装置之安装与使用
如何给多个X+Y(12pin),pitch0.5mm的接口的触觉传感器设计电路板?
支持触觉反馈的产品设计实践
工业机器人的触觉传感器有哪些?传感器作用是什么?
触觉智能正式成为吉林大学实习实践基地

触觉反馈执行器:业内首款应用于智能手机的触觉固态按钮惊艳CES






 工商网监
工商网监
评论