 如何制作红外传感器模块
如何制作红外传感器模块
硬件连接:
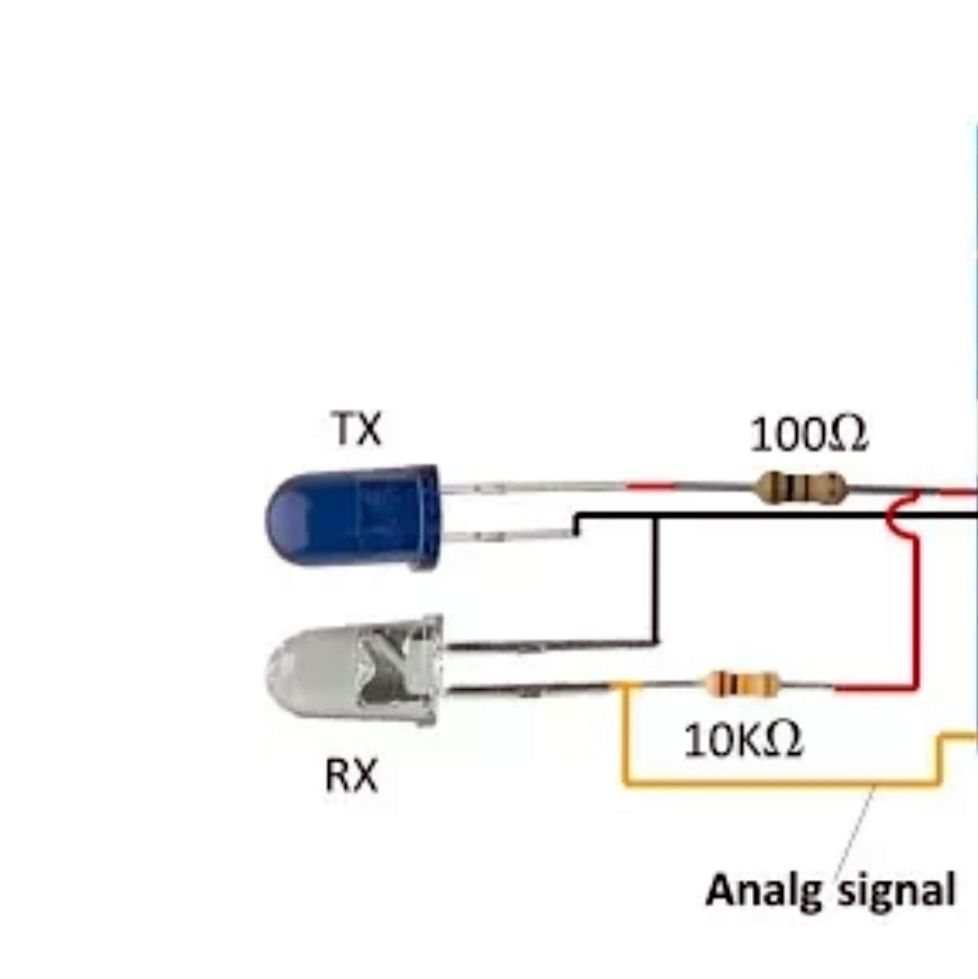
连接红外灯已给出
将红外发射器的阳极连接到100欧姆电阻
将红外接收器的负极连接到10k电阻
将10k和100ohm电阻的两端连接(这是+ ve引脚,将其连接到5v)
将红外接收器和红外发射器的阳极和阴极连接在一起(这是-ve引脚,将其接地)
将另一根导线连接到接收器的阳极(这是信号引脚) )
您可以通过在引脚上的lookind来识别led的阳极和阴极,较长的引脚是阳极,而较短的是阴极
您还可以通过观察led的边缘(平板)来识别阳极和阴极led id阴极的边缘。
如果找不到像我一样的100 ohm电阻,则可以使用任何其他接近100 ohm的电阻。
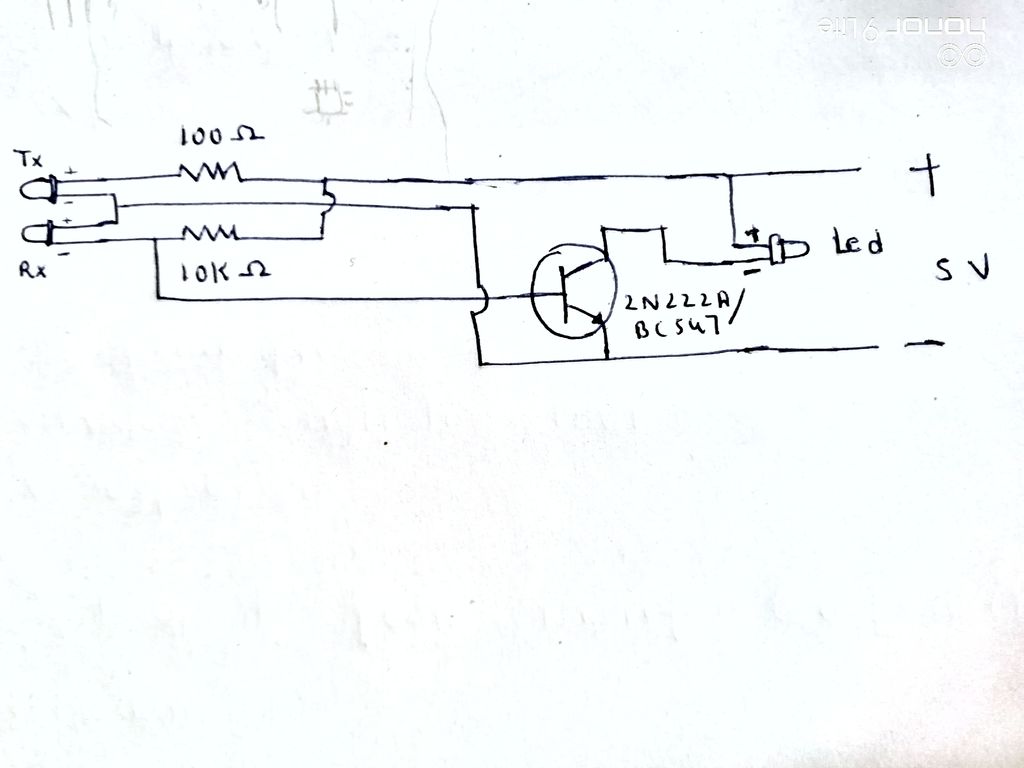
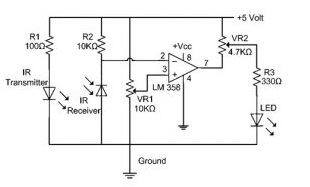
没有arduino的障碍物传感器电路:
按上述电路中所示连接组件,以制作障碍物传感器。
采用上面构建的红外传感器,将ir的信号引脚连接到2n222a/bc547晶体管的基极(如果需要,可以在基极上增加电阻)
将晶体管的发射极接地并将ir传感器的gnd引脚接地
将晶体管的集电极连接到led的阴极
将led的阳极和ir传感器连接到5v
如果您可以在头上放置任何物体,就可以看到led发光了,也可以使用蜂鸣器代替led进行指示
第3步:使用Arduino进行障碍检测:
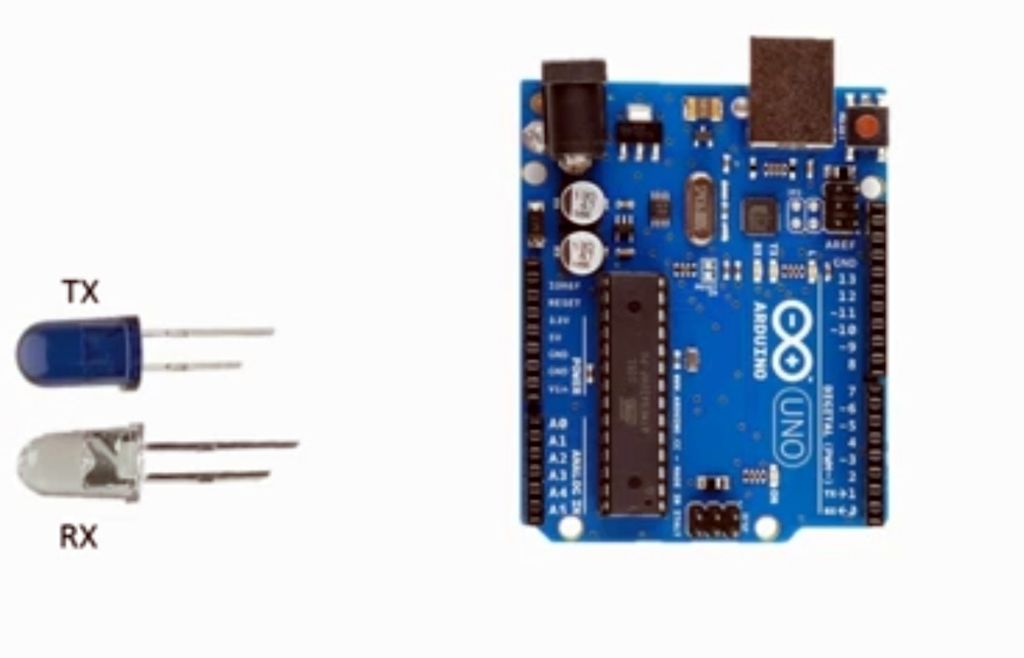
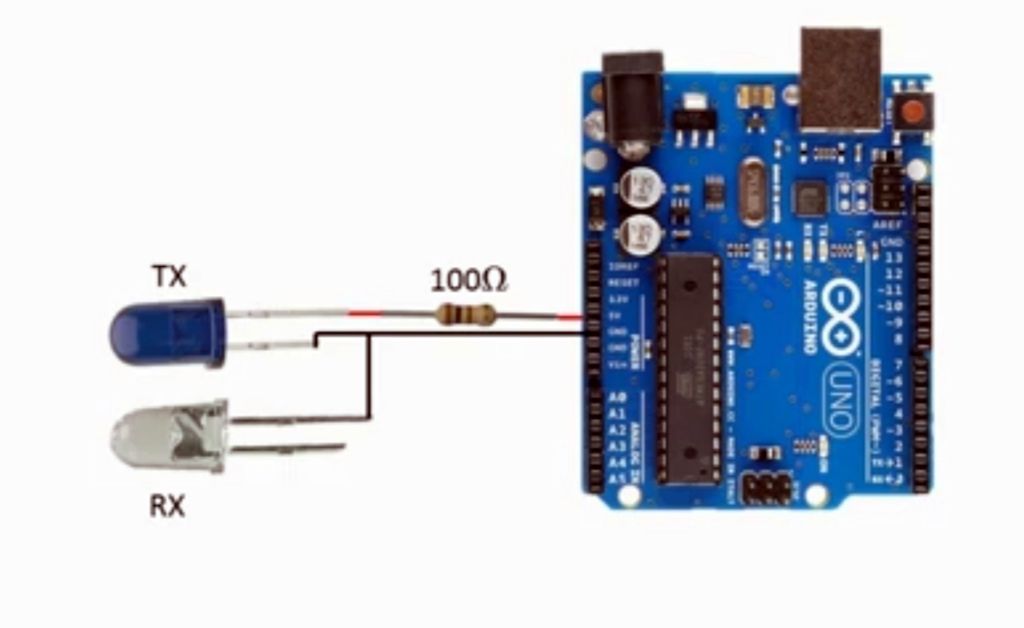

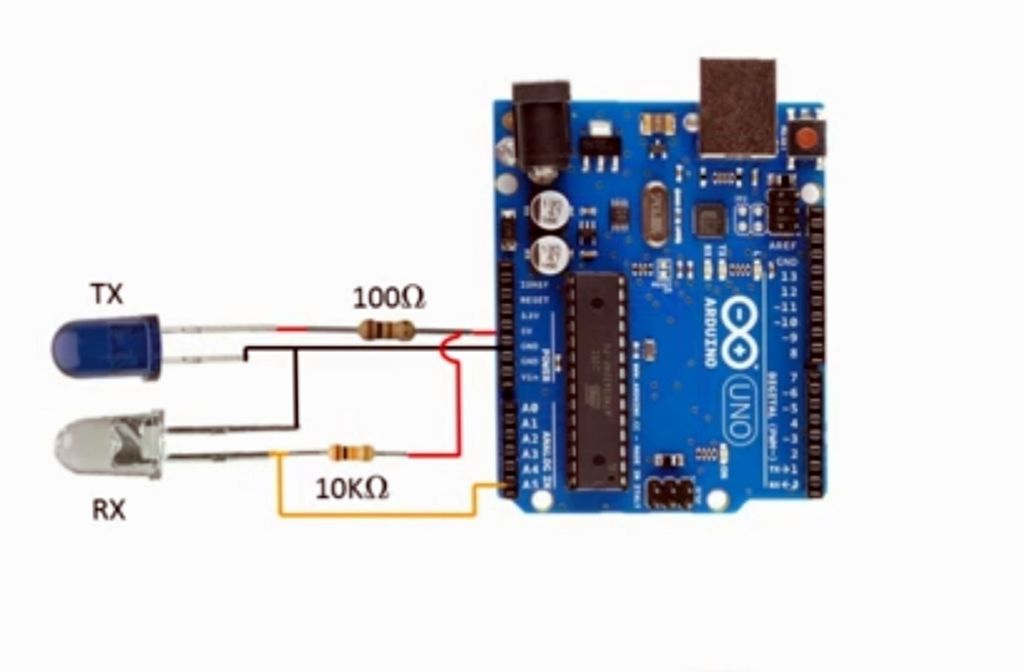
带上arduino板和红外线TRAN发射器和接收器。
将发射器阳极连接到100 ohm并连接到5v,并将阴极连接到接地端
将接收器的阳极连接到发射器的阴极将10k电阻器连接到ir接收器阳极
连接电阻两端都为5v
将接收器的信号引脚连接到arduino上的A5。
*打开arduino ide,粘贴下面给出的代码并上传
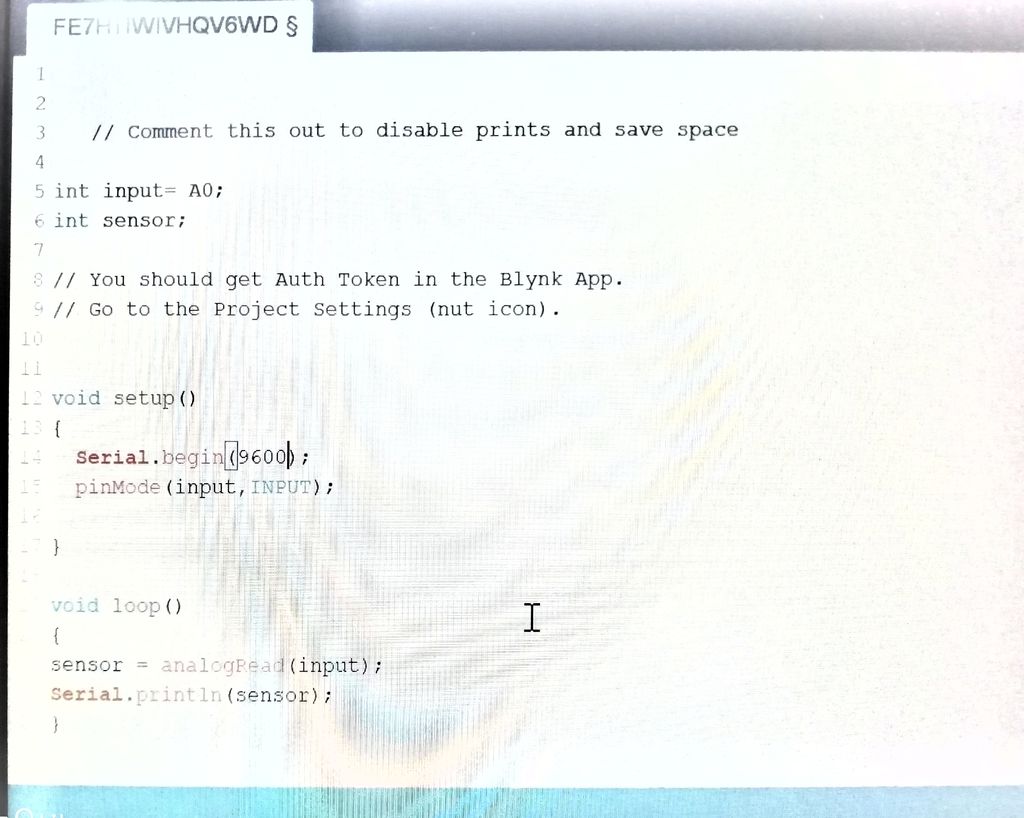
步骤4:代码:
代码工作:
打开串行监视器
您可以查看传感器发送的值
现在尝试将手靠近红外传感器
您会注意到,如果您将手移到更靠近红外的位置,该值会不断减小
通过这些值,您可以找出障碍物的距离是多远。
在下一个博客中,我将使用这些传感器制造自动驾驶汽车,因此请保持关注,直到那时再见:)
int inputpin = A5;
int sensor;
void setup( )
{
Serial.begin(9600);
pinMode(inputpin , INPUT);
void loop()
{ sensor = analogRead(inputpin);
Serial.println(sensor);
}
-
红外传感器
+关注
关注
9文章
519浏览量
47559
发布评论请先 登录
相关推荐
CW32模块使用 人体红外传感器

红外传感器的工作原理及应用
红外传感器和超声波传感器有什么区别
人体红外传感器输出信号有哪些
人体红外传感器的数据属于什么量
人体红外传感器的作用是什么
人体红外传感器能穿透玻璃吗为什么
红外传感器电路图 红外传感器的工作原理和应用
光电传感器/红外传感器
热释电红外传感器的原理
海关机场采用人体红外传感器解决安保问题

红外传感器种类及功能
红外传感器的应用场景有哪些
浅谈噪声源引入对红外传感器性能的影响






 工商网监
工商网监
评论