 如何制作可以对外界刺激做出反应的简单机器人猫
如何制作可以对外界刺激做出反应的简单机器人猫
步骤1:MoSCoW,材料和工具
材料
Arduino Uno
Arduino USB电缆(用于将arduino连接到您的电脑)
面包板
压电扬声器
触摸传感器(FSR-Interlink 406)
12个5mm LED的
6 220欧姆电阻
47k欧姆电阻
15 M至M的跳线
24 M至F的跳线
丙烯酸(用于激光切割)*
用于激光打印机的材料*
工具:
3D打印机*
激光切割器*
胶枪*
*这只是用于制作身体。如果您无法使用这些工具,则还可以使用其他材料制成主体。
MoSCoW:
这是MoSCoW的一部分我在设计RoboCat时使用的要求
必须满足:
机器人具有3D打印盒
机器人发出声音
当机器人被抚摸回去时可以感觉到
机器人的LED眼睛
应该具有:
机器人的眼睛改变
可以打开或关闭机器人
可能有:
机器人上刻有徽标侧面
机器人对明暗反应
机器人对倾斜做出反应
没有:
机器人可以行走
步骤2:接线

知道了吗?然后,我们开始吧!
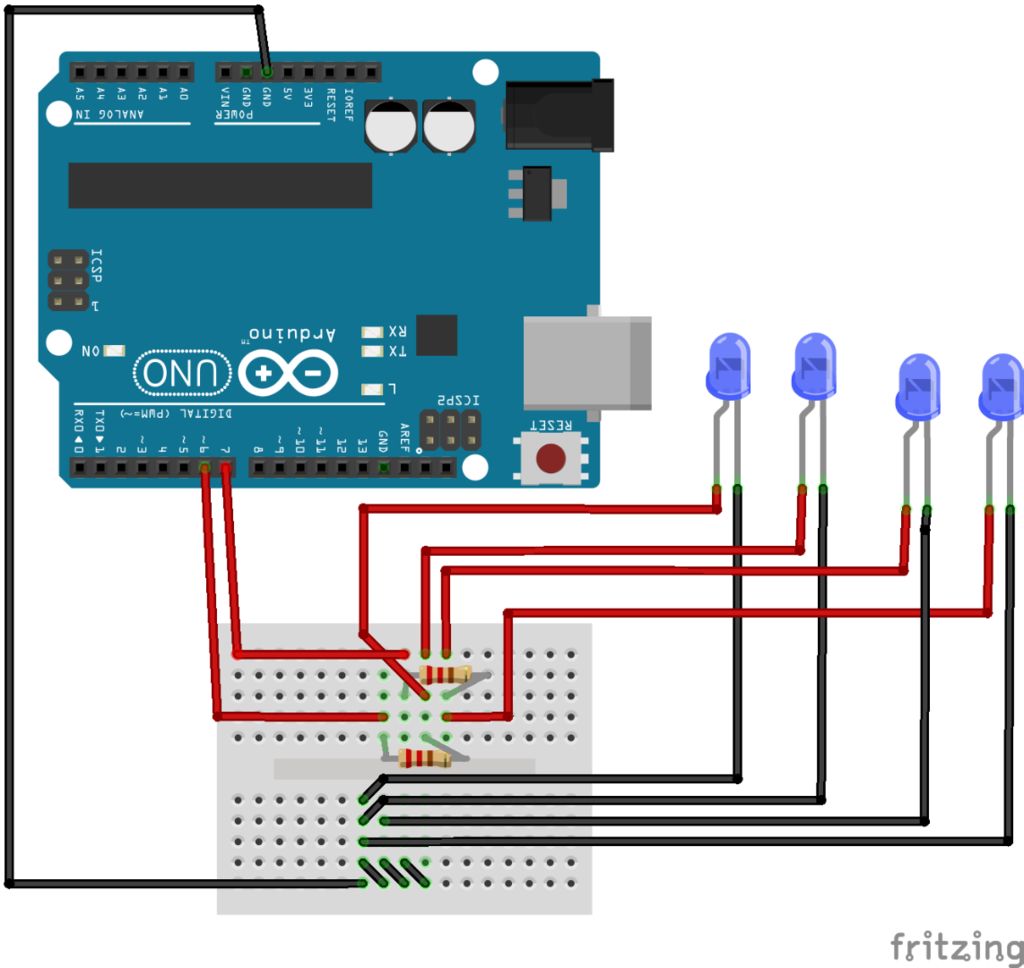
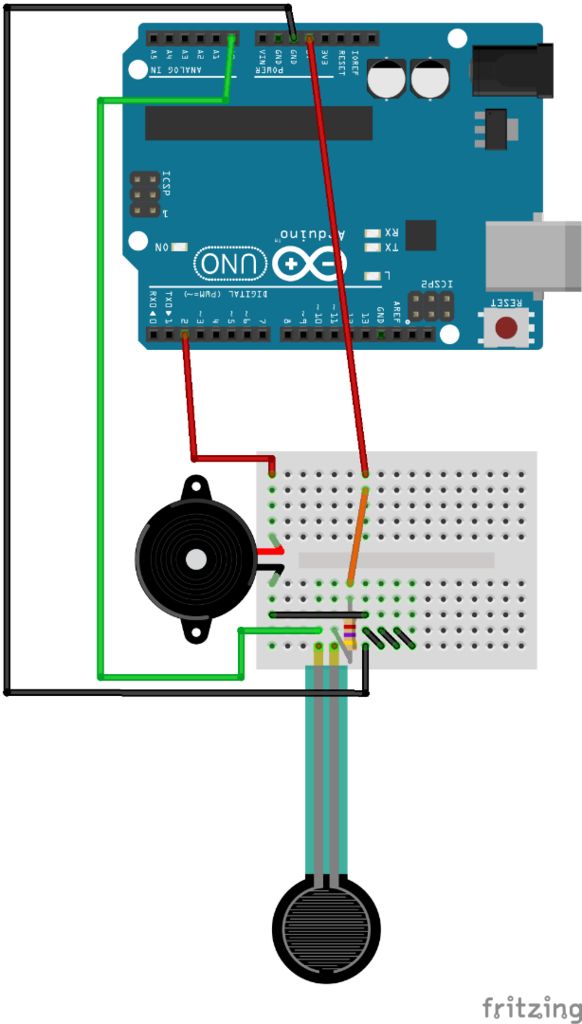
这里的图显示了所有事物的连接方式。第一个图包含了所有内容,但有些混乱,因此我添加了一些额外的图,以便您实际上可以了解发生了什么。
最简单的方法是从压电扬声器和触摸传感器开始。压电扬声器连接到引脚2并接地,触摸传感器连接到5v和A0。触摸传感器之前有一个47k欧姆的电阻。
然后,我们将在引脚6、7、8、9、11和12上添加LED。您会在面包板上放置一整堆电缆在这里,请确保不要混淆其中的任何一个(这有助于对电线进行颜色编码)。首先,我在试验板上做了几行以将LED放在上,并做了一些连接到地面的行。然后,我使用M/F跳线每行添加2个LED,并将另一端接地。我基本上在面包板上制作了3组相同的LED,仅在LED上就可以在图像中看到其中设置LED的方式。
注意:要更改触摸传感器的灵敏度,您可以也可以尝试将不同的电阻器代替47k欧姆电阻器。
第3步:代码
因此,现在我们已完成所有接线完成,但是它什么也没做,所以我们需要获取一些代码并将其上传到Arduino板上。
步骤4:3D打印和激光切割
好吧,现在我们的创造物作用像只猫,但是看起来还不像一只猫。是时候制造身体了!
要制造身体,我们将使用激光切割机和3D打印机。如果您无法使用这些工具,则还可以使用其他材料并创造性地制作自己的身体。
我们将3D打印一个身体和一个头部,并激光切割一条尾巴和一条
3d打印头时,请确保您没有更改尺寸(以便5mm LED完全适合孔中),并确保支撑架处于打开状态,因为耳朵伸出而打印机无法在稀薄的空气中打印。 (这在某些3D打印机上是标准配置,但是在某些情况下,您需要自己打开它)
我实际上没有时间自己打印主体,因此我实际上无法测试所有内容是否都适合其中,我怀疑它可能不适合,因此您可能需要摆弄一些。触摸传感器也没有孔,也没有连接到人体中arduino的电线,因此您需要将这些孔锯掉。
激光印刷板可能会落后嘴,鼻子和胡须为猫提供更多的颜色,所以您看不到里面的东西(尽管没有必要放进去,如果您不喜欢的话就放进去,只需把它留在后面),尾巴就在后面
第5步:将它们放在一起
我们要做的最后几件事。
我们仍然需要将LED放在头上。您确实需要确保将LED插入正确的孔中,否则,眼睛的外观将不符合预期。连接到引脚6的LED进入上部外部孔,连接到7的LED紧挨着这些(因此不低于),连接到8的LED紧挨着那些。连接到引脚9的LED是下部外部孔,旁边的11是LED,旁边的是12 LED。
您可以放置身体和头部连同胶枪一起使用,这也适合放在面板和尾巴中。如果您自己制作身体/零件,则可以按照使用的最佳方式将其固定。
责任编辑:wv
-
机器人
+关注
关注
211文章
28379浏览量
206898 -
Arduino
+关注
关注
188文章
6468浏览量
186936
发布评论请先 登录
相关推荐
汤姆猫发布AI语音情感陪伴机器人研发进展
开源项目!OpenCat—— 一个全能的平价四足机器人
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
认识机器人与CW32四足机器人控制项目
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
日本世嘉玩具公司召回"KIMIT Ragdoll"仿真猫机器人
字节发布机器人领域首个开源视觉-语言操作大模型,激发开源VLMs更大潜能

机器人基于开源的多模态语言视觉大模型






 工商网监
工商网监
评论