 怎样从PC控制Arduino摄像头机器人
怎样从PC控制Arduino摄像头机器人
步骤1 :布局
我已经基于流行的DD1-1跟踪平台制造了这款机器人。您可以在Ebay或AliExpress上便宜地买到它。
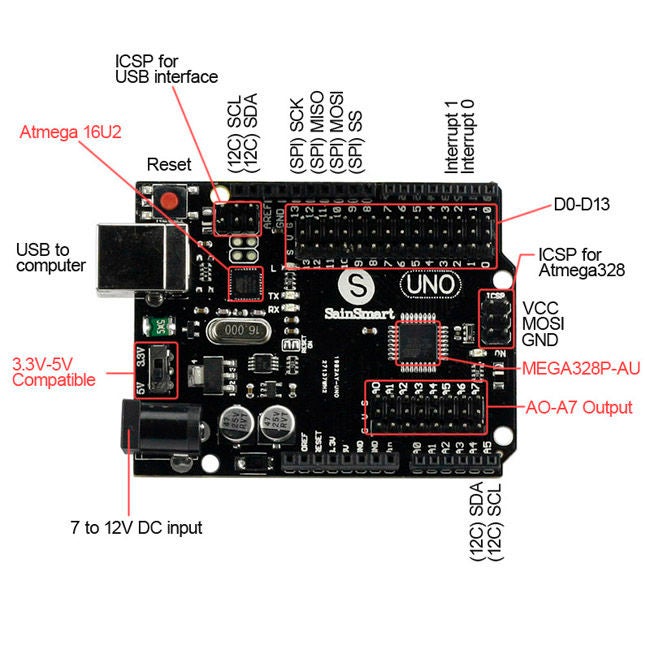
在板上,我放了一个简单的IP摄像机(型号SRICAM IP001)和一个来自Sainsmart的Arduino Uno克隆。 》步骤2:电源
机箱是从两块薄的透明有机玻璃切割而成的。
《对于主电源,我使用铅酸8伏/3.2 Ah电池。它比镍镉电池重,但便宜得多。
我还添加了一个1.6A的玻璃保险丝,因为IP摄像机是一个能源消耗者。电池充电器是一个简单的300mA电池组,但您可以使用具有电流限制的10.8V电源。
我通过降压LM2596电源模块为相机提供5V电源。在我的原始设计中,我尝试使用7805调节器,但是电池消耗非常快。
步骤3:软件
为了进行交流,我在Visual Studio中编写了一个程序,因此您需要使用.NET 4.0 Framework。
对于接收器上的控件,有HC-06,而在发送器上有便宜的蓝牙加密狗(它在Windows 7上可以正常工作)。
我正在用一个简单的分压器监控电压有两个10k电阻。两端在+和–之间,中间连接到模拟输入A0。
您可以在此处下载Arduino和.exe程序的代码:
https://dl.dropboxusercontent.com/u/51764059/pardu 。..
更新1:
您可以在此处下载Visual Studio代码:
https://dl.dropboxusercontent.com/u/51764059/Pardu 。..
(非常感谢tiktakx项目)并将其解压缩。
如果您不知道如何编辑代码,请先从Microsoft下载Visual Studio Express(免费版)。
然后在安装后,转到“打开”-》“项目”-》“ Parduino.sln”。在解决方案资源管理器中打开表单,然后双击要查看代码的每个元素。
每次按一个键,蓝牙都会向arduino发送一个字符。 F(向前),B(向后),L(左),R(向右),S(停止),G(向左),I(向右),H(向左),J(向右)。/p》
-
机器人
+关注
关注
211文章
28379浏览量
206902 -
摄像头
+关注
关注
59文章
4836浏览量
95594 -
Arduino
+关注
关注
188文章
6468浏览量
186941
发布评论请先 登录
相关推荐
摄像头及红外成像的基本工作原理

认识机器人与CW32四足机器人控制项目
摄像头模块突然无法显示!!!可能是什么原因?
机器人视觉的结构及工作原理
机器人视觉可以分为哪三个部分?
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于FPGA的六自由度机器人视觉伺服控制方案设计

如何利用NVIDIA Isaac Sim对工作站的摄像头性能进行基准测试呢?






 工商网监
工商网监
评论