 如何为机器人制作气动系统
如何为机器人制作气动系统
步骤1:为什么选择气动?
气动使用压缩空气完成任务的系统。任何使用连接到压缩机的工具(例如牙医钻头或城市公交车(门))的人都经历过气动系统。好吧,那太好了,但是为什么我要使用它呢?
实际上非常容易设置,并且它们有助于快速更改。当比赛当天发生故障时,更换或添加新零件确实很容易,它们也非常强大,最大允许60psi的气压(无论如何对于FIRST比赛)足以完成大多数任务。气动装置相对较轻(我们的整个系统约为10磅),它们不需要太多的电池电量。气动也更易于设计,您无需将链条和皮带与特殊的壳体或其他任何东西对齐。缺点:它们确实占用了空间,并且需要更多的编程才能使压缩机和螺线管达到功能,它们还需要大量的零件投资,因为该系统需要所有零件才能正常工作(一个夯锤不是像电动机那样的独立零件)。
想象一下将电动机或任何其他电子元件接线,但是,您只需拥有一组可在任何地方使用的管子,而不是正负管,就无需使用规格(电线尺寸)或要剥线的电线,也不需要任何工具即可将它们放在一起(无需进行任何焊接和焊接)热收缩)。我认为我们所有人都很难将正确尺寸的螺丝刀安装到正确的插槽中,并“恰好”将其拧紧,以使电线保持在原位。所有这些都可以(在大多数情况下)抛弃,气动简单而清洁(与液压不同)。
如果您自己执行此操作,则无需进行任何编程(会有所帮助),因为它们都是阀门
第2步:您需要什么
所以您需要什么? (我根据2014年FIRST气动手册中的内容对此进行了改编)。
压缩机:这是一种将所有空气压缩在一起的装置,它是所有气动装置的基础。它在操作过程中会变得很热,因此请确保它附近有一个风扇,并且不要靠近电缆或气动电缆,因为它会熔化绝缘层并在气动电缆中插入孔。它还会引起大量振动,因此在将其安装到机器人上时要考虑到这一点,因此请勿将其放在负责自动操作的摄像机旁边。同样,在接线时,它会通过 20安培保险丝或断路器流过电流(FIRST仅表示断路器,但我们的保险丝管理得很好,安全检查员也不介意)。我们从气动套件中获得的压缩机是 Viair 090C ,如果您选择不使用该压缩机,那么大多数经验丰富的团队将使用另一种压缩机,因为这支压缩机开始死亡时,当变热时,运行时间大约为五分钟,而冷却时间约为半小时。 请勿向后接线压缩机,因为压缩机会损坏,就像是led而不是电动机。您可以订购一个此处
您还需要一个尖峰继电器来控制压缩机。
泄压阀:这是必须完全通过黄铜与空气压缩机连接的部件(如果执行此操作,则应遵循FIRST规则您自己并没有关系),这是一种机械安全措施,当压力过高时,该措施会泄漏空气。可以通过移动螺纹环来调整它。(我将在后面介绍)。我们得到的是一个Norgren,它运作完美,您可以在此处订购自己的。
安装泄压阀所需的其他连接器:将1/8英寸npt外螺纹(国家管道螺纹)连接到1/4英寸内螺纹连接器,请在此处订购1。在这里。可以在此处订购1男2女1/8npt。您也可以使用三重1/8npt母型连接器 * 和公对公1/8in npt的公制连接器 * (AndyMark不出售这些部件,但我建议使用因为它们比2母1母连接器具有更广泛的用途,所以*这些链接未经测试用于演示,我们在本地找到了我们的产品。
压力开关:当电子元件作为传感器时,当压力超过120psi(据说,我们的压力从80-110psi跳至任何地方)时,它会向程序发送信号,以关闭压缩机。可以使用1/8英寸npt黄铜连接器(上面的链接*)将其连接到系统的其余部分。您可以在此处订购一个。
气罐):用于存放压缩空气,以备后用。您可能会希望尽可能多地安装在机器人上。请注意不要让白色的战车螺纹端口,因为它们有爆炸的趋势。黑色战车为我们的团队服务良好。您可以从这里订购。
调节器:这些将压力限制在下游的任何组件,多个调节器意味着您可以拥有组件在不同的压力下运行。进行过水肺潜水的任何人都使用过这些呼吸器,它们阻止了水箱中的空气(120psi)爆炸到您的嘴中。底部有一个箭头,显示了空气应该流过它们的方向。如果将它们放入,则一旦超过指定压力,压力就会从调节器中泄漏出来。我们在调节器的顶部印有说明,并能够向下按以锁定旋钮并阻止压力改变。可以从这里订购它们。
压力表:这些显示系统内部的压力,我建议获取3 -4 ,具体取决于您计划拥有多少条不同的压力线。这些直接拧入调节器。您可以在这里订购它们。
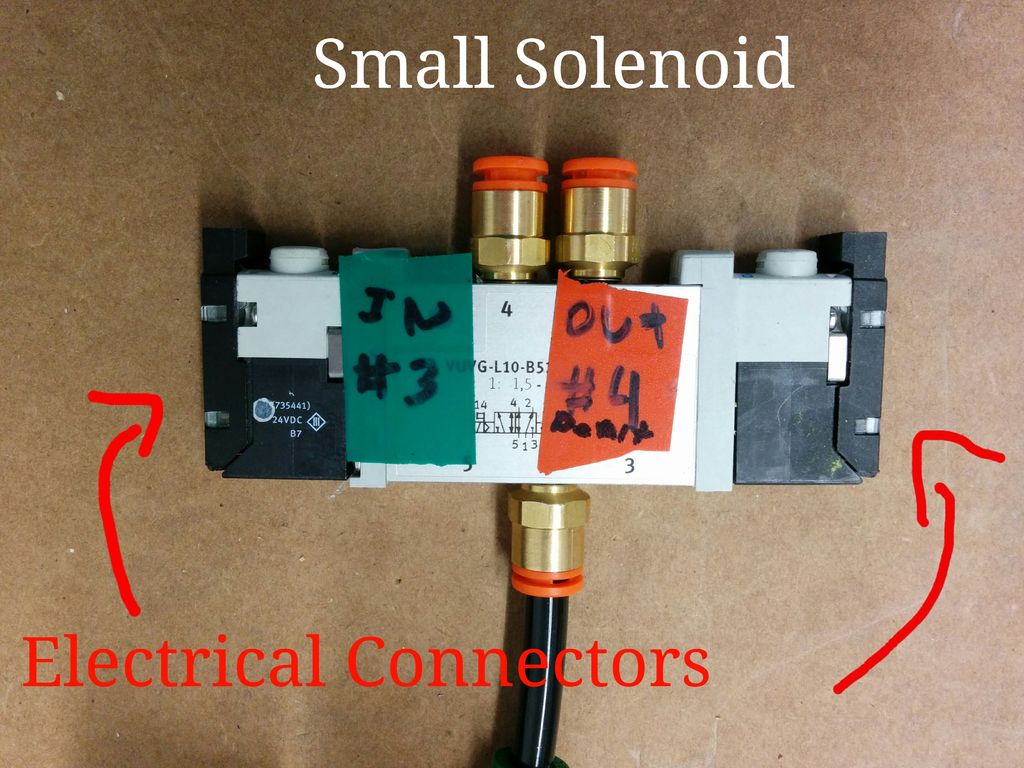
电磁阀:这些就像电气系统中的断路器或晶体管。当它们被触发(从程序中)时,它们将气流从一个端口切换到另一个端口,有些是双向作用的,可以双向控制,有些则没有,一旦信号消失,它们就会自动切换回去。 这些允许对气动撞锤进行远程控制。我们使用的是FESTO阀门,我们有两种尺寸,孔(孔)越大,空气流动越快 》通过阀门(首先,您可以拥有的最大孔径为3/8英寸)。因此,如果您需要速度,请使用更大的阀门。小型电线可以从此处订购,如果您不想使用MacGyver的方式将电线连接到它们,则每个电磁铁需要几对 以及电线。您还需要其中的三个 较小的推动力以连接每个小型电磁阀的配件,或者您可以从此处 订购它们的包装。 我相信这是一个较大的螺线管,但是我们没有订购,而是在本地购买的。
插入阀(球阀):这些是手动方式要控制空气流量,您将至少需要 一个,以便通过安全检查。 获得很多(4-5),因为您会发现自己想要一种快速的方法来阻塞气动装置的某些端口,而不必将一堆黄铜配件和插头组装在一起。可以从此处 订购。我们的团队使用了一些黄铜管,我认为它们已包含在套件中,但看来AndyMark不再出售它们。
推入连接配件:这些是将所有组件连接在一起的零件。 获取大量这些内容(50-60),它们都应该 1/8英寸npt和1/4英寸推进行连接。它们具有各种形状和尺寸,有直管,肘管,流量控制管(它们有点像调节器,但它们会改变速度而不是压力), y连接器的连接, T型连接的连接 ,或打包交易。其中一些已被保护,但其他(以及您使用了两次以上的磁带)将需要 Teflon胶带(请注意,如果您购买其他商品,则密度较低),有一个正确的方法来贴上特氟龙胶带(我没有制作视频)。
管道:这是空气将流过的管道,以到达各个气动部件。这也是使您的机器人在比赛中脱颖而出的机会,高级团队可以使用各种疯狂的彩色半透明或在黑暗的管道中发光。除了所有的笑话,颜色的确有助于区分高压线和低压线,或者哪个管连接到哪个气缸,因此最好使一种颜色(最好是黑色)(最好是黑色)和一堆其他颜色的较小角色。所有管子应外径的1/4 。我们的工具包是所有团队都能获得的零件套件,但是您可以在此处
气压缸(柱塞)订购:这是所有其他零件的用途,它们使用存储的气压扩展(或收缩)以完成任务。有所有形状和尺寸,孔(即圆柱体的宽度)决定了圆柱体可以施加的力(越大,压力可以作用的平方英寸越大,因此施加的力就越大)请注意,大口径气缸(2“)并不是一个好主意,因为它们会慢慢填充,并且会消耗掉您存储的大量空气。我们的团队使用的气缸分别为1和1/4英寸。行程/行程(气缸的运动时间)将确定气缸的时间,我再次建议将其保持较小,因为较大的气缸不能很好地适应机器人和所有FIRST团队每年都会获得两个免费的 Bimba气瓶,在零件套件中有一张应使用的优惠券,即使您当年不使用它们也是如此。可以储存零件以备后用。您也可以从此处订购零件,但请务必检查零件是否有(最大的1/8“螺纹。
如果您在机器人技术方面一直走得很远,很可能已经有了这些其他工具,但以防万一:
小月牙扳手
内六角扳手(英制和公制)
剪线钳
副手柄
这是很多东西,但是请相信我,这是值得的,它将打开各种您团队的设计思路。而且一切都可以在明年重复使用,因此您实际上只需要购买一次。
步骤3:气动的工作方式
气动通过控制压缩空气的流量来工作。电子设备控制电子流动的方式几乎相同。气动使用阀门来控制空气流动,这些阀门可以由其他压缩空气源触发(但是在FIRST比赛中禁止使用此类阀),也可以由电力或手动触发(这些不是很有用)但适用于机器人)。由电控制的阀称为螺线管,因为它们利用电流感应磁场,该磁场使金属碎片运动并迫使空气以特定方式运动。
最简单的气动系统只有一个手动控制阀。任何使用过空气钉子的人都使用过这样的系统。空气压缩机压缩并存储空气,然后当用户拉动扳机时,释放空气并将钉子钉入木材(或任何钉子)。
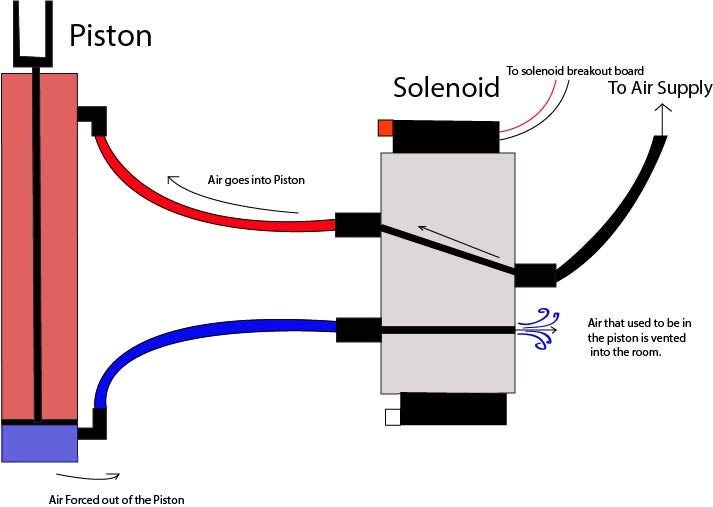
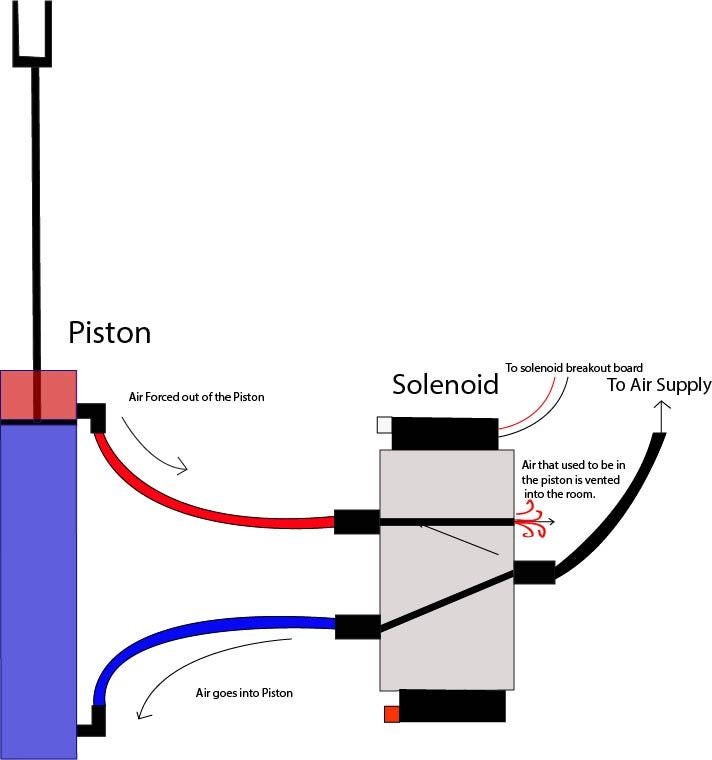
我们在FIRST机器人中使用的阀属于电磁阀。第一张图片显示了双作用螺线管如何通过向气缸的顶部填充空气来将活塞推入向下位置。第二张图片显示了当程序触发电磁阀时,活塞如何伸出。
就是这样,气动实际上非常简单。就像一切一样,尽管气动系统会变得非常复杂,但是对于机器人而言,简单的系统运行良好,没有理由使其变得非常复杂。
第4步:基本设置
FIRST比赛所需的基本气动系统如下
压缩机---》泄压阀---》储气罐---》压力表---》压力开关---》球阀
-将压缩机连接到尖峰继电器上,使用20安培保险丝。再次使用20安培断路器将尖峰继电器连接到配电板上。将pwm电缆连接到Spike,然后询问您的编程人员cRIO(I/O板上)的哪个端口将另一端插入。 (图1)
-将1/8“ npt外螺纹与1/8” npt外螺纹连接器拧入压缩机,确保在所有螺纹连接处都贴上特氟龙胶带。 (图2-6)
-将1/8“ npt黄铜T型连接器之一拧入1/8” npt连接器的裸露端。 (图7)
-将1/8“ npt到1/4” npt扩大器拧到泄压阀的基座上。 (图9)
-将泄压阀组件拧入黄铜T型连接器的“顶部”。 (图10)
-可选-调整泄压阀的方向,使其靠近压缩机,以节省空间。 (图11)
-将直的1/8“ npt拧到1/4”的螺纹,以将接头连接到黄铜T型连接器的最后一个孔中,然后将一根管子推入,然后将其推入管道的裸露端到空气储存罐中。 (图12-13)
-将一根管子推入储气罐的远端,并通过1/8“推将其连接以将配件连接到带螺纹的1/8” npt T -连接器。
-将量规插入该黄铜T型连接器的顶部(图14-15)
-组装另一个带螺纹的1/8“ npt T型连接器它可以推动将两个“底部”端口上的配件连接起来,并将压力开关拧入“顶部”端口中。(图16)
-将刚刚创建的组件连接到T- (pic 17)
-组装球阀,使其具有推动力以连接两端的配件,并连接到带有(图18)
-将两根电线连接到压力开关的端子上并用胶带包裹,然后将这两根电线拼接成pwm电缆,仅使用连接到两个外部引脚的pwm电缆,其余的中间电缆没有连接到任何并应使用电工胶带包裹。 (图20)
-询问您的程序员将pwm拼接电缆插入哪个端口,具体取决于每个团队的程序。(图21)
系统的所有部分在一起,我们只需要校准系统即可。
-打开机器人,压缩机应该开始运行。
-观察压力表,当针达到120psi时转动机器人
-调整泄压阀上的螺栓,直到空气开始从顶部的小孔漏出。
现在完成基本设置,下一步是完成
步骤5:添加高压线
要向系统中添加一条高压管,它实际上可以起作用,请从以下开始:
-切断气罐和压力开关之间的管
-输入将T型连接器插入到您刚刚通过切割管子而形成的空间中-将一根管子推入T型连接器的裸露孔中/*从此处开始,使管子的长度尽可能短节省空气并使系统更快。 */
-将调节器推到从T型连接器延伸的那段管子上(将螺纹拧入以连接接头),确保箭头指向远离管子的方向,而不是指向管子。
-将另一根管子(可能根据您的配色方案而定,使用不同的颜色)推入与该管子相对的端口中,箭头应指向该管子,从此处开始系统中的气压将被设置通过调节器。
-将压力计旋入调节器上其他两个裸露的端口中的任意一个(确保已用特氟隆胶带固定)。
-在装有调节器的包装中,应该有两个小螺纹件,他们可能在顶部有一个艾伦(Allen)钥匙形孔。用胶带将其中之一包起来,然后将其穿入调节器的其余端口。
-通过拧紧m7螺纹推动器以将配件连接到端口中,从而设置电磁阀。
-将从调节器伸出的管子推入螺线管的“底部”,底部只有一按才能连接,顶部有两个管子。
-将不同颜色的管子插入到电磁铁的其余端口中电磁阀,一个将使气缸伸出,一个将使其收缩。在打开压缩机电源之前,我们不知道是哪一个。
-将这些管子放在推杆/执行器/气缸的顶部和底部。气缸需要推压才能将配件拧入气缸顶部和底部的孔中,我建议使用弯头,因为它们具有自由旋转的能力。
-打开压缩机。请注意气瓶可能会伸出,所以请不要靠近它,它不会快速射出,但请多加注意。
-如果柱塞伸出,则底部的气管正在吸气,如果它不是顶部的管道正在接收空气。用一条胶带标记正在通气的试管。
-旋转调节器顶部的旋钮,并观察连接到调节器上的压力表以设置压力。当您有所需的压力时(在第一次比赛中,压力不超过60),然后向下按调节器的旋钮,这将阻止其旋转并改变压力。
-根据您的目的布置油管,您是否想要在打开机器人电源时使气缸伸出以收缩吗?
-将电线连接到螺线管的“左”和“右”端,可能需要将这些电线拼接成pwm电线以适合进入螺线管分线板,与程序员协商确定应将其插入哪个端口。
-现在,您的机器人具有升高和降低液压缸的能力,这取决于您。/*该程序需要正确设置,但是我对它的了解不足以指导您,因此应该很快就会有关于对FIRST机器人进行编程的说明,因此请检查一下。 */
步骤6:添加低压线
添加低压力管线与高压管线完全相同,不同之处在于调节器设置为不同的压力。
在高压管线的T型连接器和压力开关之间的管路中切出一个空间, a T型连接器:
-按照相同的步骤(步骤4)对调节器和电磁阀进行配管。
-调节调节器,使其压力比前面的压力低。
-继续进行此操作您可以按照降压顺序处理任意数量的压力线。/*顺序不会影响系统,但是按照这种顺序是常规的。一旦缠结在机器人的腹部,您可能希望对不同的行进行颜色编码,以便轻松更改*/
第7步:常见问题
这是我的常见问题页面,其中包含常见问题和上述问题的解决方案。如果您想添加一些内容,请发表评论。
泄漏了我该怎么办?
所有的球阀都完全关闭,这对我们的团队来说是很多问题了。
然后,如果您在嘈杂的地方(例如比赛),请听一下空气泄漏的地方。 ),您还有两个选择,一个装满肥皂水的喷雾瓶或一个大口径的试管。如果使用肥皂水,请将其喷洒在任何可能泄漏的接头附近,并注意是否有气泡。如果您正在使用电子管,则将一端放在耳朵附近(或里面),另一端到处移动,直到听到泄漏声为止。肥皂水是更好的选择,因为即使少量的压缩空气也会严重损坏您的耳膜。
大多数情况下,泄漏是由未完全啮合或松动的连接配件推动引起的。确保完全压住连接配件的推力,然后稍稍拉出以将内部的齿插入塑料中。
也可能是管道切成90度时,未直截的管子可能会泄漏。
如果仍然泄漏,请在螺纹连接处添加特氟龙胶带。
如果仍然泄漏,请寻找损坏的电缆。它们可能被压缩机熔化,被风扇割断,被机器挤压等。..
压力上升到一定压力然后泄漏了吗?
这是两件事之一:
1.)向后安装调压器,切换调压器的方向,以设置系统开始泄漏之前达到的压力。
2.)调节器后某处的连接器泄漏。在将调节器设置为系统泄漏的压力后,检查所有连接器。
点火时空气是否从电磁阀中泄漏?
这是正常现象,输入管两侧的孔是排气口,用于排出先前存储在活塞中的空气。
还有其他问题,请查看Chief Delphi论坛并在此处发布问题。
FIRST竞赛也承诺了一些加快活塞速度的方法,通常会将一些东西扔进某种类型的球门中,因此速度通常比活塞施加的力更重要。
》
(无特殊顺序:
1。)获取更大的电磁阀。
2。)获得小口径气缸,这将减少流入活塞以使其完全伸展所需的空气量。
2。 p》
3。)如果您的活塞需要快速向前移动,则拆下从气缸前部端口到电磁阀的管路。这意味着空气只需要流过电磁阀一次,但这也意味着您不能缩回气缸。
4。)缩短从电磁阀到活塞的管路长度,这可以与使用小口径气缸的原理相同,移动的空气更少。
5。)在螺线管之前但在调节器之后添加一个调压罐(空气存储罐)。这样可以提供60 psi的大量空气。并且意味着空气不必流经螺线管。不利的一面是,当您缩回钢瓶时,您将用完油箱中的所有空气。
6。)确保在FIRST比赛中将调节器设置为最大压力60psi。
-
气动
+关注
关注
0文章
26浏览量
16816
发布评论请先 登录
相关推荐
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
柔性机器人与刚性机器人区别与联系

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
abb机器人系统如何添加选项
工业机器人控制系统的基本组成有哪些
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
机器人是如何工作的 机器人工作原理解析
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论