 机器人无线遥控发射接收电路
机器人无线遥控发射接收电路
机器人无线遥控发射电路
无线遥控对操作设备的要求较高,本节以遥控距离为1000m的三通道IC型无线遥控器为例,对无线遥控收发装置作一介绍。它可对三种电器设备同时遥控,电路简单可靠,制作方便。

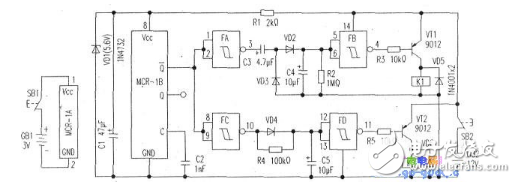
(1)无线遥控发射电路罔7-15是发射机电路。它由主振电路和高放电路组成。DF-27是无线遥控器专用发射器件,采用单列封装9脚集成电路,允许最大功耗为600mW、最大空载电流18mA、9—12V直流供电。在外部开关的控制下,产生受一定对应占空比方波调制的高频27MHz间歇波信号。DF-27内部由调宽(占空比)电路、方波发生电路、高频振荡(osc)电路、调制电路以及高频功率放大电路5个部分组成。调宽(占空比)电路由电流密勒电路(DF-27内部)和开关电路构成,引脚③与引脚④外接按钮开关Sl、S2,根据开关的不同操作来改变内部开关电路的状态,从而改变引脚②外接定时电容C2的充、放电电流比,引脚①外接定时电阻尺。
高频振荡频率由引脚⑥、⑦外接选频元件晶振(B)的参数决定,通常采用晶体振荡于127MHz的载波信号。调制电路是一种开关电路,载波信号受方波控制,然后送到高频功率放大器放大后,由引脚⑧将高频信号发射出去。
当按钮开关Sl相S2处于断开状态时,方波发生电路输出低电平“O”,无调制状态。载波信号赢通混合电路开关到高频功放电路,‘故这时引脚⑨输出等幅高频渡。对应于其他三种开关组合状态,引脚⑧输出占空比分别为z5%、75%和50%间断高频波群信号。
机器人无线遥控接收电路
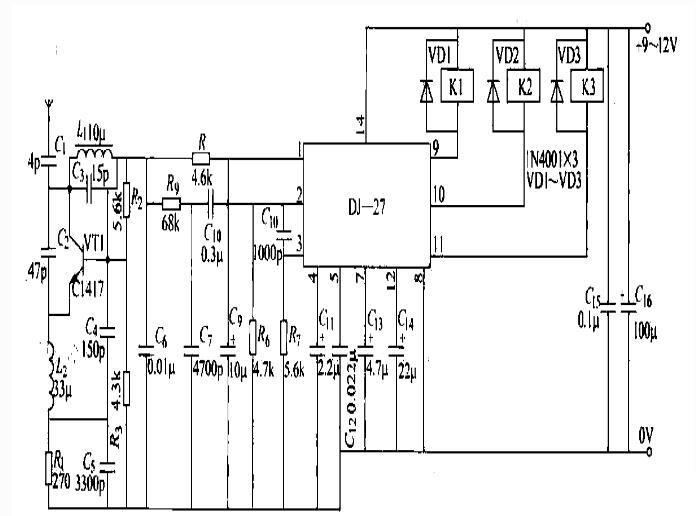
(2)接收电路接收电路由晶体管VT1及G、cI、Ll、L2和C3等组成超再生检波电路,如图7-16所示,把天线接收的高频信号中的调制方波信号榆出,送往DJ-27接收专用电路引脚@输入放大和比较判断。
VT1的电源由DJ-27的引脚①据供约5v电压,产生超再生振蔼,调整Ll使振荡频率接近发射机和接收机的载频频率27MHz。在这两种频率的差额差拍作用下,在甬上产生出调制方渡信号,先经G、C。R6滤除高频成分,再经c6耦合隔断直流.cl。进一步滤波后加入DJ-27的弓}脚②。在DJ-27内部经过放大、比较判断后由引脚⑨、⑩、@输出。
当7-16图中的S1、S2断开,不发射信号。接收电路中DJ-27的引脚⑨~@开路,Kl、K2、K3不接通,机器人不工作。Sl闭合,发射控制信号,DJ-27的引脚◎输出低电平,引脚⑩、@开路,继电器K1吸合,接在机器人身上的Kl常开触点闭合,机器人开始动作。同理.S2闭合,DJ-27的引脚⑩输出低电平.K2闭合,引脚⑨、⑩开路,机器人动作。Sl、S2同时闭合,DJ-27的引脚@输出低电平,K3闭合,引脚⑧、⑩开路,机器人动作。
(3)机器人驱动驱动系统是机器人的手和脚.即运动机构和执行机构的基本组成部分。驱动系统的设计与制作是比赛机器人谢意与实践的重要内容。它的任务不仅是向机器人传递动力,而且要提供准确的运动定位和灵活的操作,是机器人制胜的法宝之一,因此其重要性是不言而喻的。通常机器人驱动有电气、液压、气压三种方式。其中以电气驱动最常见,它按供电的方式叉可以分为直流电动机和交流电动机。机器人比赛规则通常规定采用电池供电,即直流电,几乎所有的比赛机器人都是靠直流电动机驱动的。
-
机器人
+关注
关注
211文章
28800浏览量
209107 -
无线遥控
+关注
关注
25文章
167浏览量
31930
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论