 机器视觉+SCARA机器人在光伏组件加工中的应用
机器视觉+SCARA机器人在光伏组件加工中的应用
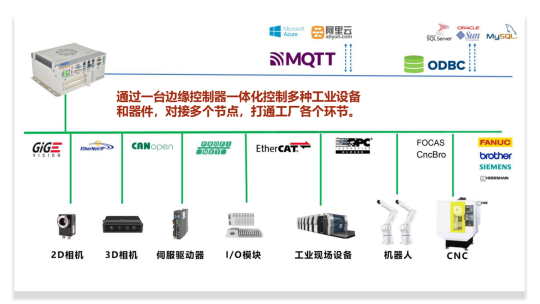
单晶(或多晶)硅太阳能电池片的输出电压、电流和功率都很小,只有将它们进行串并联封装成组件,才可以单独作为电源使用。由于电池片尺寸具有多种固定标准,直接串联、并联不一定满足组件需要,因此在焊接前还要切割成更小的单元,行业比较先进的切割方式是采用激光划片机。
划片作为组件加工的首道工序,其后续工序如下图:

△光伏组件加工工艺
众为兴机器人、视觉系统主要应用于上图划片和串焊两道工艺,给客户提供快速精准上料解决方案,其中划片机对上料速度精度要求更高。以国内某家激光加工设备和太阳能成套设备厂商现场应用为例,众为兴为其激光划片机提供的SCARA机器人和AVS一拖二视觉系统,实现了双工位高速高精度的上料,满足关键指标3000pcs/h、放置误差+划片精度<±0.15mm。
项目概况
该套设备适用于单晶硅和多晶硅太阳电池片任意尺寸划片,能够完成自动给料、自动定位、自动激光划片、自动装盒等功能,自动化程度高;可选配1/3裂片机构,实现1/3片自动划片裂片。机器人和视觉系统位于上料工位。
为了提高加工效率,划片产能要达到3000pcs/h,特别设计了两条传送带同时送料,分别经过视觉系统定位后,由一台SCARA左右交替快速精准地抓取电池片放置到划片台,进行激光划片。放置误差+划片精度在±0.15毫米以内。视觉系统还会对其崩边、缺角、裂纹、电池片方向等进行检测,对有问题的来料进行放置废料盒处理,可以再次加工利用。

△结构图示
方案构成
取料机器人采用众为兴AR3215本体
+QC400驱控一体机;
视觉系统采用众为兴AVS2300
一拖二视觉系统,
搭配两个1000w像素工业相机。
项目方案和亮点
此项目主要难点在于高精度高速度,要在1.2S内要完成, 视觉定位(不良品筛选)→机器人取料→放料到划片台→返回。其中取放料吸破真空时间占用0.3-0.4S,由于电池片易碎,在取放过程需要轻拿轻放,要求机器人快速动作的过程中适时地减速,动作快慢自如。
机器人方面,对轨迹路径进行了优化,对过程交互IO信号进行了缓存处理,应用机器人系统的多线程机制实现了左侧取料右侧拍照、右侧取料左侧拍照,取料拍照互不耽误的高节拍效果。
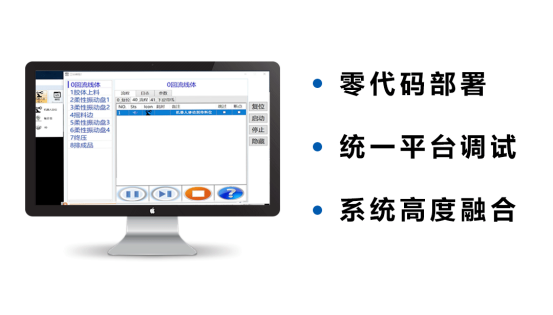
视觉定位方面,要在200mm X 250mm的大视野下实现高精度定位,采用了众为兴独有的自动标定算法,不但简化了标定流程还提升了标定精度;另外,视觉软件采用了等比例缩放、找边找角点等功能提升精度适应不同尺寸电池片切换。视觉缺陷检测方面,专门开发了电池片检测模块,针对电池片缺陷进行检测。


△AVS视觉软件界面
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】+初品的体验
复合机器人在3c电子行业的应用

【原创】 drawbot 平面机械臂scara写字画画机器人DIY教程贴


机器人视觉与计算机视觉的区别与联系
机器人视觉的应用范围
SCARA机器人中旋转花键的维护和保养方法!
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
协作机器人在食品和饮料中的的应用





 工商网监
工商网监
评论