编译 Ubuntu 固件
为了方便用户的使用与开发,官方提供了 Linux 开发的整套 SDK,本章详细的说明 SDK 的具体用法。
准备工作
下载源码
下载 repo 工具:
mkdir linuxcdlinux git clone https://github.com/Firefly
Team/repo.git
下载 Linux-SDK:
初始化 repo 仓库:
mkdir linux-sdkcdlinux-sdk ../repo/repo init --repo-url https://github.com/FireflyTeam/repo.git -u https://github.com/FireflyTeam/manifests.git -b linux-sdk -m px30/px30_linux_release.xml
同步源码:
同步过程中,网络波动会导致下载速度过低中断同步,可以使用下面脚本同步代码:
#! /bin/bash../repo/repo sync -cwhile[$?-ne0]do../repo/repo sync -cdone
考虑到国内用户使用 repo 从网络上下载全部代码会比较慢,官方提供了基础的源码包Linux_SDK.7z。
下载 Linux_SDK.7z:
# 把压缩包放在上一步下载 repo 工具的目录下7z x Linux_SDK.7z# 更新代码repo sync -c
Linux_SDK 目录介绍
目录:
├── linux_sdk │ ├── app │ ├── buildroot# Buildroot 根文件系统的编译目录│ ├── build.sh -> device/
rockchip/common/build.sh# 全自动编译脚本│ ├── device# 编译相关配置文件│ ├── distro# Debian 根文件系统生成目录│ ├── docs# 文档│ ├── envsetup.sh -> buildroot/build/envsetup.sh │ ├── external │ ├── kernel# 内核│ ├── Makefile -> buildroot/build/Makefile │ ├── mkfirmware.sh -> device/rockchip/common/mkfirmware.sh# rockdev 目录链接更新脚本│ ├── prebuilts │ ├── rkbin │ ├── rkflash.sh -> device/rockchip/common/rkflash.sh# 烧写脚本│ ├── rootfs# Debian 根文件系统编译目录│ ├── tools# 烧写、打包工具│ └── u-boot# u-boot
搭建 SDK 编译环境
安装 Ubuntu 编译所需工具,确保工具都正确安装:
sudo apt-get install repo git-core gitk git-gui gcc-
arm-linux-gnueabihf u-boot-tools device-tree-com
piler\gcc-aarch64-linux-gnu mtools parted libudev-dev lib
usb-1.0-0-dev
python-linaro-image-tools\linaro-image-tools gcc-4.8-mul
tilib-arm-linux-gnueabihf gcc-arm-linux-gnueabihf libssl-dev\gcc-aarch64-linux-gnu g+conf autotools-dev libsigsegv2 m4 intltool libdrm-dev curl sed make\binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio python unzip
rsync file bc wget\libncurses5 libqt4-dev libglib2.0-dev libgtk2.0-dev libglade2-dev cvs git mercurial rsync openssh-client\
subversion asciidoc w3m dblatex graphviz python-matplotlib libc6:i386 libssl-dev texinfo\liblz4-tool genext2fs lib32st
dc++6
编译 SDK
编译前配置
选择开发板对应的配置文件。配置文件会链接到device/rockchip/.BoardConfig.mk,查看该文件可确认当前所使用的配置文件:
./build.sh px30-ubuntu.mk# 文件路径在 `device/rockchip/px30/px30-ubuntu.mk`
用户也可以通过参考该配置生成新的配置文件来适配自己所需要的固件。
重要配置介绍:(如果需要定制固件,可以修改下列配置信息)
# Uboot defconfig(uboot 配置文件)exp
ortRK_UBOOT_DEFCONFIG=evb-px30# Kernel defconfig(kernel 配置文件)exportRK_KERNEL_DEFCONFIG=px30_linux_defconfig# Kernel dts(dts 文件)exportRK_KERNEL_DTS=px30-firefly-lvds# pa
rameter for GPT table(分区信息,十分重要)exportRK_PARAMETER=parameter-ubuntu.txt# packagefile for make update image(打包配置文件)exportRK_PACKAGE_FILE=px30-ubuntu-package-file# rootfs image path(根文件系统镜像路径)exportRK_ROOTFS_IMG=xxxx/xxxx.img
全自动编译
在配置和搭建环境的工作都做好的前提下:
全自动编译的固件默认会编译一遍 Buildroot 根文件系统。生成固件目录rockdev/,同时会在IMAGE/中备份。
部分编译
recovery 分区可省略,若有需要,编译 recovery:
Ubuntu 文件系统可以通过云盘下载,以 Ubuntu 18.04 为例:下载链接https://pan.baidu.com/s/1DuCzTGARDi7APxyKs9Nl1A#list/path=%2F
把得到的镜像放到 SDK 的根目录处:
# 解压tar -zxvf ubuntu_18.04_arm64_20190226111421.img.tar.gz# SDK 根目录下mkdir ubunturootfs mv ubuntu_18.04_arm64_20190226111421.img ubunturootfs/# 修改 px30-ubuntu.mk 文件vim device/rockchip/px30/px30-ubuntu.mk# 把 RK_ROOTFS_IMG 属性改成 Ubuntu 文件系统镜像得路径(也就是 ubuntu_18.04_arm64_20190226111421.img)RK_ROOTFS_IMG=ubunturootfs/ubuntu_18.04_arm64_20190226111421.img
注意:Ubuntu 根文件系统镜像存放路径不能错。
运行./mkfirmware.sh会自动更新rockdev/rootfs.img的链接。
固件打包
同步更新各部分镜像
每次打包固件前先确保rockdev/目录下文件链接正确:
ls -l ├── boot.img -> ~/linux/linux_sdk/kernel/boot.img ├── idblo
ader.img -> ~/linux/linux_sdk/u-boot/idbloader.img ├── MiniLoaderAll.bin -> ~/linux/linux_sdk/u-boot/px30_loader_v1.10.112.bin ├── misc.img -> ~/linux/linux_sdk/device/rockchip/rockimg/wipe_all-misc.img ├── oem.img ├── parameter.txt -> ~/linux/linux_sdk/device/rockchip/px30/parameter-ubuntu.txt ├── recovery.img -> ~/linux/linux_sdk/buildroot/output/rockchip_px30_recovery/images/recovery.img ├── rootfs.img -> ~/linux/linux_sdk/ubunturootfs/ubuntu_18.04_arm64_20190226111421.img ├── trust.img -> ~/linux/linux_sdk/u-boot/trust.img ├── uboot.img -> ~/linux/linux_sdk/u-boot/uboot.img └── userdata.img
可以运行./mkfirmware.sh更新链接:
提示:若不是编译全部的分区镜像,在运行./mkfirmware时,会遇到如下类似情况:
error: /home/xxx/linux/linux-sdk/buildroot/output/rockchip_px30_recovery/images/recovery.img not found!# 表示 recovery 分区没有编译出镜像,其他的情况类似,如 oem.img、userdata.img# 上文提到,这些属于可省略分区镜像,可以不用理会。
打包统一固件
注意:打包前请确认tools/linux/Linux_Pack_Firmware/rockdev/package-file是否正确。打包会根据此文件进行分区打包。此文件链接会在执行./build.shpx30-ubuntu.mk命令时更新,如果配置不对请再次执行该命令。
整合统一固件:
分区介绍
parameter
parameter.txt包含了固件的分区信息十分重要,你可以在device/rockchip/px30目录下找到一些parameter.txt文件,下面以 parameter-debian.txt 为例子做介绍:
FIRMWARE_VER:8.1 MACHINE_MODEL: PX30 MACHINE_ID:007MANUFACTURER: PX30 MAG
IC: 0x5041524B ATAG: 0x00200800 MACHINE: px30 CHECK_MASK: 0x80 PWR_HLD:0,0,A,0,1 TYPE: GPT CMDLINE:mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(trust),0x00002000@0x00008000(misc),0x00010000@0x0000a000(boot),0x00010000@0x0001a000(recovery),0x00010000@0x0002a000(b
ackup),0x00020000@0x0003a000(oem),0x00700000@0x0005a000(rootfs),-@0x0075a000(userdata:grow)uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE属性是我们关注的地方。以 uboot 为例0x00002000@0x00004000(uboot)中0x00004000为uboot分区的起始位置0x00002000为分区的大小。后面的分区规则相同。用户可以根据自己需要增减或者修改分区信息,但是请最少保留 uboot,trust,boot,rootfs 分区,这是机器能正常启动的前提条件。parameter-ubuntu.txt 中使用的就是这样的最简分区方案。
分区介绍:
-
uboot 分区:烧写 uboot 编译出来的 uboot.img
-
trust 分区:烧写 uboot 编译出来的 trust.img
-
misc 分区:烧写 misc.img,开机检测进入 recovery 模式(可省略)
-
boot 分区:烧写 kernel 编译出来的 boot.img,包含 kernel 和设备树信息
-
recovery 分区:烧写 recovery.img(可省略)
-
backup 分区:预留,暂时没有用。后续跟 Android 一样作为 recovery 的 backup 使用(可省略)
-
oem 分区:给厂家使用,存放厂家的 app 或数据。只读。代替原来音箱的 data 分区。挂载在 /oem 目录(可省略)
-
rootfs 分区:存放 Buildroot 或者 Debian 编出来的 rootfs.img,只读
-
userdata 分区:存放 app 临时生成的文件或者是给最终用户使用。可读写,挂载在 /userdata 目录下(可省略)
package-file
此文件应当与parameter保持一致,用于固件打包。可以在tools/linux/Linux_Pack_Firmware/rockdev下找到相关文件。以 px30-ubuntu-package-file 为例介绍:
# NAME Relative path##HWDEF HWDEFpackage-file package-file bootloader Image/MiniLoaderAll.bin parameter Image/parameter.txt trust Image/trust.img uboot Image/uboot.img boot Image/boot.img rootfs:grow Image/rootfs.img backup RESERVED
以上是 SDK 编译后生成的镜像文件。根据parameter.txt只打包自己用到的映像文件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
相关推荐
如何在Ubuntu下编译原生固件PX4?
发表于 02-14 07:01
1.1. 入手指南1.1.1. 配件AIO-PX30-JD4 的标准套装包含以下配件:CORE-PX30-JD4 核心板一块MB-JD4-RK3328&PX30 底板一块铜管天
发表于 07-19 16:32
原始固件是一种能以逐位复制的方式烧写到存储设备的固件,是存储设备的原始映像。原始固件一般烧写到SD卡中,但也可以烧写到eMMC中。烧写原始固件有许多工具可以选用:
![的头像]() 发表于
发表于 11-14 11:03
•2164次阅读
编译 Ubuntu 固件(GPT) 为了方便用户的使用与开发,官方提供了Linux开发的整套sdk,本章详细的说明SDK的具体用法。 准备工作 下载源码 下载repo工具
![的头像]() 发表于
发表于 12-17 16:42
•3333次阅读

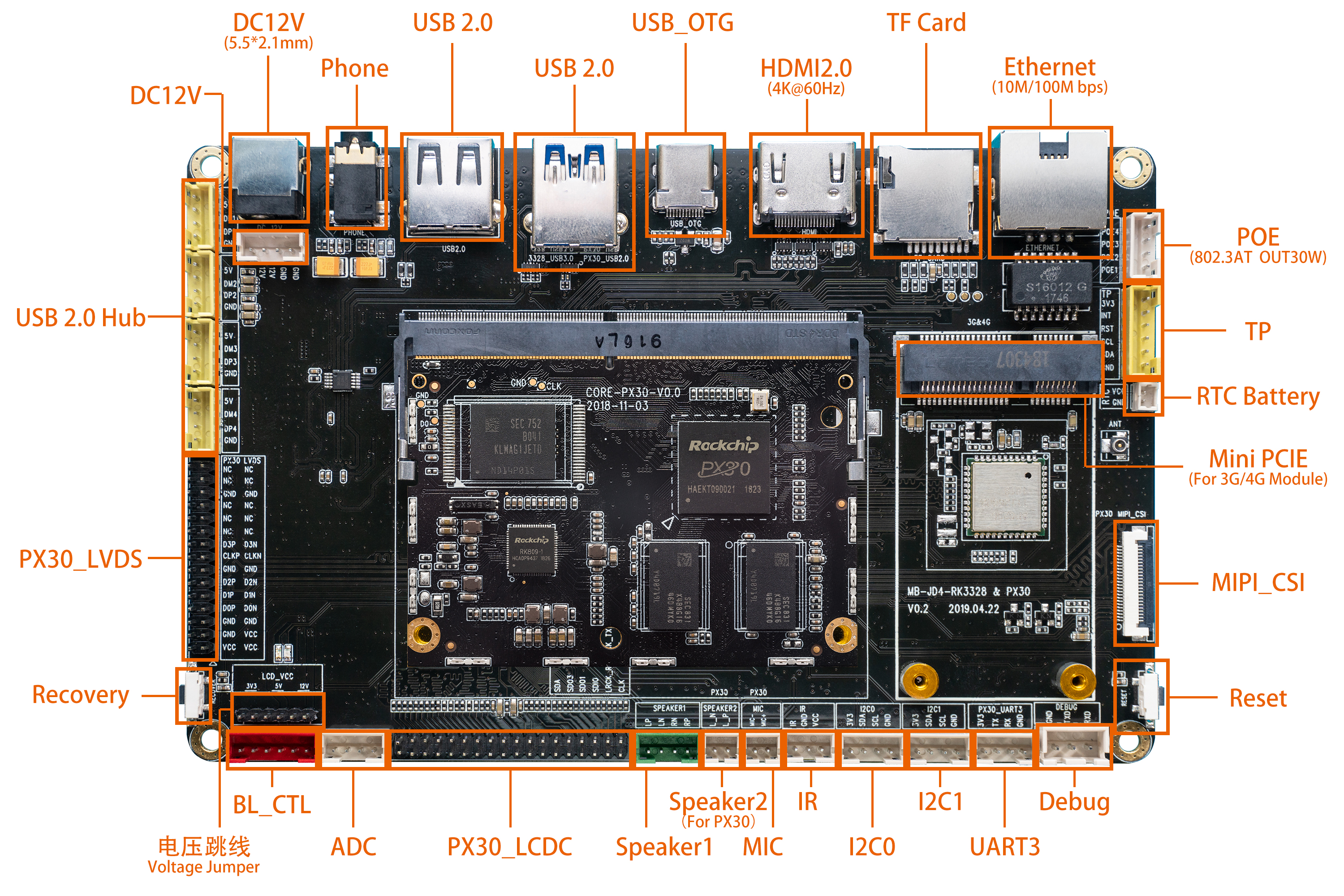
AIO-PX30-JD4 提供了丰富的接口,主要包括:电源接口, 1 x USB3.0(device),6x USB2.0(接口×4,座子×2),以太网,LVDS屏幕接口,TP触摸接口,屏电压跳线
![的头像]() 发表于
发表于 12-19 16:36
•1907次阅读
firefly
![的头像]() 发表于
发表于 12-18 15:53
•1390次阅读
编译 Buildroot 固件
本章介绍 Buildroot 固件的编译使用。
![的头像]() 发表于
发表于 12-19 16:54
•4383次阅读
AIO-PX30-JD4 有灵活的启动方式。一般情况下,除非硬件损坏,AIO-PX30-JD4 开发板是不会变砖的。
![的头像]() 发表于
发表于 12-20 08:49
•3476次阅读
采用PX30工业级64位低功耗处理器,拥有强大的硬解码能力,以及丰富的接口,仅需扩展功能底板即可快速实现项目研产,可适用于AIOT物联网设备、车载中控、游艺/游戏设备、商显一体设备等应用领域
![的头像]() 发表于
发表于 12-20 08:50
•1608次阅读
环境:PC:Ubuntu20.0.4主机1、下载PX4源码新建一个pixhawk/source目录,cd进去git源码cd pixhawk/sourcegit clone https
发表于 12-14 18:48
•5次下载

电子发烧友网站提供《Core PX30 JD4固件Android 8.1固件分享.txt》资料免费下载
发表于 09-13 09:23
•13次下载
电子发烧友网站提供《Core PX30 JD4固件Buildroot(GPT)文件分享.txt》资料免费下载
发表于 09-13 09:22
•0次下载
电子发烧友网站提供《Core PX30 JD4固件Ubuntu(GPT)文件分享.txt》资料免费下载
发表于 09-13 09:21
•1次下载
电子发烧友网站提供《Core 1808 JD4固件Ubuntu18.04.txt》资料免费下载
发表于 09-20 17:03
•0次下载
电子发烧友网站提供《AIO 3566JD4固件Ubuntu.txt》资料免费下载
发表于 09-20 10:19
•0次下载
 fireflyCORE-PX30-JD4编译 Ubuntu 固件简介
fireflyCORE-PX30-JD4编译 Ubuntu 固件简介





 工商网监
工商网监
评论