 fireflyAIO-3399J-编译Ubuntu固件简介
fireflyAIO-3399J-编译Ubuntu固件简介
编译 Ubuntu 固件(GPT)
为了方便用户的使用与开发,官方提供了Linux开发的整套sdk,本章详细的说明SDK的具体用法。
准备工作
下载源码
下载repo工具:
mkdir linux cd linux git clone https://github.com/FireflyTeam/repo.git
下载完整 SDK
方法一
初始化repo仓库:
mkdir linux-sdk cd linux-sdk ../repo/repo init --repo-url https://github.com/FireflyTeam/repo.git -u https://github.com/FireflyTeam/manifests.git -b linux-sdk -m rk3399/rk3399_linux_release.xml
同步源码:
../repo/repo sync -c
同步过程中,网络波动会导致下载速度过低中断同步,可以使用下面脚本同步代码:
../repo/repo sync -c while [ $? -ne 0 ] ; do ../repo/repo sync -c; done
方法二(国内用户推荐使用)
因为国内用户可能git拉代码会比较慢,所以官方提供了基础得源码包Linux_SDK.7z
下载Linux_SDK.7z
1.把压缩包放在上一步下载repo工具的目录下 7z x Linux_SDK.7z 2.更新代码 repo sync -c
下载裁剪版 SDK
初始化repo仓库:
mkdir linux-sdk cd linux-sdk ../repo/repo init --repo-url https://github.com/FireflyTeam/repo.git -u https://github.com/FireflyTeam/manifests.git -b linux-sdk -m rk3399/rk3399_linux_ubuntu_release.xml
同步源码:
../repo/repo sync -c
注意: 裁剪版 SDK 主要删掉了编译 Buildroot 和 Debian 的源码,方便不需要编译根文件系统的用户获取。
Linux_SDK 目录介绍
目录:
├── linux_sdk │ ├── app │ ├── buildroot buildroot 根文件系统的编译目录 │ ├── build.sh -> device/rockchip/common/build.sh 全自动编译脚本 │ ├── device 编译相关配置文件 │ ├── distro debian 根文件系统生成目录 │ ├── docs 文档 │ ├── envsetup.sh -> buildroot/build/envsetup.sh │ ├── external │ ├── kernel 内核 │ ├── Makefile -> buildroot/build/Makefile │ ├── mkfirmware.sh -> device/rockchip/common/mkfirmware.sh rockdev链接更新脚本 │ ├── prebuilts │ ├── rkbin │ ├── rkflash.sh -> device/rockchip/common/rkflash.sh 烧写脚本 │ ├── rootfs debian根文件系统编译目录 │ ├── tools 烧写、打包工具 │ └── u-boot
搭建SDK编译环境
编译buildroot固件:
sudo apt-get install repo git-core gitk git-gui gcc-arm-linux-gnueabihf u-boot-tools device-tree-compiler \ gcc-aarch64-linux-gnu mtools parted libudev-dev libusb-1.0-0-dev python-linaro-image-tools \ linaro-image-tools autoconf autotools-dev libsigsegv2 m4 intltool libdrm-dev curl sed make \ binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio python unzip rsync file bc wget \ libncurses5 libqt4-dev libglib2.0-dev libgtk2.0-dev libglade2-dev cvs git mercurial rsync openssh-client \ subversion asciidoc w3m dblatex graphviz python-matplotlib libc6:i386 libssl-dev texinfo \ liblz4-tool genext2fs lib32stdc++6
编译debian固件:
sudo apt-get install repo git-core gitk git-gui gcc-arm-linux-gnueabihf u-boot-tools device-tree-compiler \ gcc-aarch64-linux-gnu mtools parted libudev-dev libusb-1.0-0-dev python-linaro-image-tools \ linaro-image-tools gcc-4.8-multilib-arm-linux-gnueabihf gcc-arm-linux-gnueabihf libssl-dev \ gcc-aarch64-linux-gnu g+conf autotools-dev libsigsegv2 m4 intltool libdrm-dev curl sed make \ binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio python unzip rsync file bc wget \ libncurses5 libqt4-dev libglib2.0-dev libgtk2.0-dev libglade2-dev cvs git mercurial rsync openssh-client \ subversion asciidoc w3m dblatex graphviz python-matplotlib libc6:i386 libssl-dev texinfo \ liblz4-tool genext2fs lib32stdc++6
ubuntu固件:(根文件系统请使用官方提供的根文件系统镜像)
sudo apt-get install repo git-core gitk git-gui gcc-arm-linux-gnueabihf u-boot-tools device-tree-compiler \ gcc-aarch64-linux-gnu mtools parted libudev-dev libusb-1.0-0-dev python-linaro-image-tools \ linaro-image-tools gcc-4.8-multilib-arm-linux-gnueabihf gcc-arm-linux-gnueabihf libssl-dev \ gcc-aarch64-linux-gnu g+conf autotools-dev libsigsegv2 m4 intltool libdrm-dev curl sed make \ binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio python unzip rsync file bc wget \ libncurses5 libqt4-dev libglib2.0-dev libgtk2.0-dev libglade2-dev cvs git mercurial rsync openssh-client \ subversion asciidoc w3m dblatex graphviz python-matplotlib libc6:i386 libssl-dev texinfo \ liblz4-tool genext2fs lib32stdc++6
编译SDK
编译前配置
配置文件 aio-3399j.mk:
./build.sh aio-3399j.mk #文件路径在`device/rockchip/rk3399/aio-3399j.mk`
配置文件生效会连接到device/rockchip/.BoardConfig.mk,检查该文件可以验证是否配置成功。
注意:aio-3399j.mk为编译生成buildroot固件的配置文件.同时用户也可以通过参考该配置生成新的配置文件来适配自己所需要的固件。
重要配置介绍:(如果需要diy固件,可能需要修改下列配置信息)
# Uboot defconfig export RK_UBOOT_DEFCONFIG=firefly-rk3399 编译uboot配置文件 # Kernel defconfig export RK_KERNEL_DEFCONFIG=firefly_linux_defconfig 编译kernel配置文件 # Kernel dts export RK_KERNEL_DTS=rk3399-firefly-aio 编译kernel用到的dts # parameter for GPT table export RK_PARAMETER=parameter-ubuntu.txt 分区信息(十分重要) # packagefile for make update image export RK_PACKAGE_FILE=rk3399-ubuntu-package-file 打包配置文件 # rootfs image path export RK_ROOTFS_IMG=xxxx/xxxx.img 根文件系统镜像路径
注意,十分重要!!
默认配置编译buildroot固件,如果想编译其他固件(如ubuntu固件)请执行一下操作:
下载ubuntu根文件系统镜像https://pan.baidu.com/s/1DuCzTGARDi7APxyKs9Nl1A#list/path=%2F
把得到的镜像放到sdk的指定目录:
#解压 tar -xvf rk3399_ubuntu18.04_LXDE.img.tgz #sdk根目录下 mkdir ubunturootfs mv rk3399_ubuntu18.04_LXDE.img ubunturootfs/ #修改aio-3399j.mk文件 vim device/rockchip/rk3399/aio-3399j.mk #把RK_ROOTFS_IMG属性改成ubuntu文件系统镜像得路径(也就是rk3399_ubuntu18.04_LXDE.img) RK_ROOTFS_IMG=ubunturootfs/rk3399_ubuntu18.04_LXDE.img
注意:ubuntu根文件系统镜像存放路径不能错
全自动编译
在配置和搭建环境的工作都做好的前提下:
./build.sh
全自动编译的固件默认编译buildroot固件。生成固件目录rockdev/,同时会在IMAGE中备份。
部分编译
kernel
./build.sh kernel
u-boot
./build.sh uboot
recovery
recovery分区可省略,若有需要: 编译recovery:
./build.sh recovery
rootfs
buildroot
./build.sh rootfs
debian:
cd rootfs/ 1: #Building base debian system by ubuntu-build-service from linaro sudo apt-get install binfmt-support qemu-user-static live-build sudo dpkg -i ubuntu-build-service/packages/* sudo apt-get install -f 2: #编译 32 位的 debian: RELEASE=stretch TARGET=desktop ARCH=armhf ./mk-base-debian.sh #或编译 64 位的 debian: RELEASE=stretch TARGET=desktop ARCH=arm64 ./mk-base-debian.sh #上面编译如果遇到如下问题情况: noexec or nodev issue /usr/share/debootstrap/functions: line 1450: ..../rootfs/ubuntu-build- service/stretch-desktop-armhf/chroot/test-dev-null: Permission denied E: Cannot install into target '/home/foxluo/work3/rockchip/rk_linux/rk3399_linux/rootfs/ubuntu-build-service/stretch- desktop-armhf/chroot' mounted with noexec or nodev # 解决办法: mount -o remount,exec,dev xxx (xxx is the mount place), then rebuild it. 3: # 编译 32 位的 debian: VERSION=debug ARCH=armhf ./mk-rootfs-stretch.sh # 开发阶段推荐使用后面带 debug # 编译 64 位的 debian: VERSION=debug ARCH=arm64 ./mk-rootfs-stretch-arm64.sh 4: ./mk-image.sh mv linaro-rootfs.img ../distro/ 5: #修改aio-3399j.mk文件 vim device/rockchip/rk3399/aio-3399j.mk #把RK_ROOTFS_IMG属性改成ubuntu文件系统镜像得路径(也就是linaro-rootfs.img) RK_ROOTFS_IMG=distro/linaro-rootfs.img
ubuntu18.04,可以通过云盘下载:
下载链接https://pan.baidu.com/s/1DuCzTGARDi7APxyKs9Nl1A#list/path=%2F
把得到的镜像放到sdk的根目录处:
#解压 tar -xvf rk3399_ubuntu18.04_LXDE.img.tgz #sdk根目录下 mkdir ubunturootfs mv rk3399_ubuntu18.04_LXDE.img ubunturootfs/ #修改aio-3399j.mk文件 vim device/rockchip/rk3399/aio-3399j.mk #把RK_ROOTFS_IMG属性改成ubuntu文件系统镜像得路径(也就是rk3399_ubuntu18.04_LXDE.img) RK_ROOTFS_IMG=ubunturootfs/rk3399_ubuntu18.04_LXDE.img
注意:ubuntu根文件系统镜像存放路径不能错
运行./mkfirmware.sh会自动更新rockdev/rootfs.img的链接
固件打包
同步更新各部分镜像
每次打包固件前先确保rockdev/目录下文件链接是否正确:
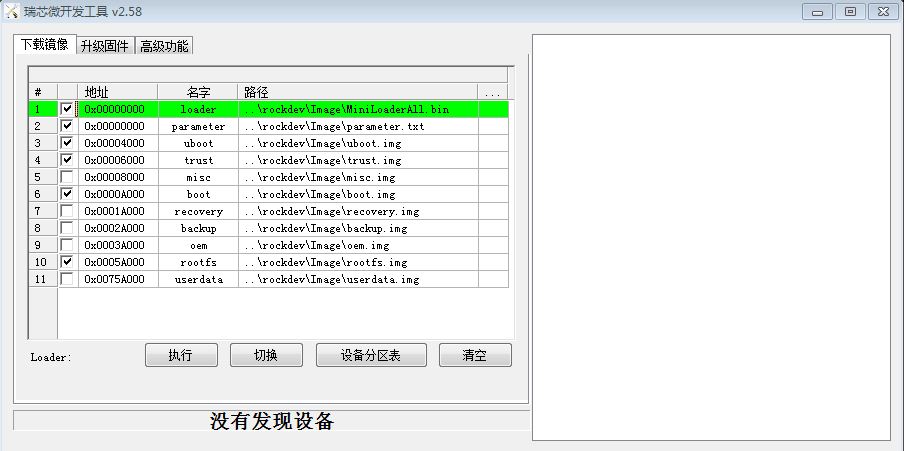
ls -l ├── boot.img -> ~/project/linux_sdk/kernel/boot.img ├── idbloader.img -> ~/project/linux_sdk/u-boot/idbloader.img ├── linaro-rootfs.img ├── MiniLoaderAll.bin -> ~/project/linux_sdk/u-boot/rk3399_loader_v1.14.115.bin ├── misc.img -> ~/project/linux_sdk/device/rockchip/rockimg/wipe_all-misc.img ├── oem.img ├── parameter.txt -> ~/project/linux_sdk/device/rockchip/rk3399/parameter-ubuntu.txt ├── recovery.img -> ~/project/linux_sdk/buildroot/output/rockchip_rk3399_recovery/images/recovery.img ├── rootfs.img -> ~/project/linux_sdk/ubunturootfs/rk3399_ubuntu18.04_LXDE.img ├── trust.img -> ~/project/linux_sdk/u-boot/trust.img ├── uboot.img -> ~/project/linux_sdk/u-boot/uboot.img └── userdata.img
可以运行./mkfirmware.sh更新链接
./mkfirmware.sh
提示:若不是编译全部的分区镜像,在运行./mkfirmware时,会遇到如下类似情况:
error: /home/ljh/proj/linux-sdk/buildroot/output/rockchip_rk3288_recovery/images/recovery.img not found! 表示recovery分区没有编译出镜像,其他的情况类似,如oem.img、userdata.img 上文提到,这些属于可省略分区镜像,可以不用理会。
打包统一固件
注意:打包前请确认tools/linux/Linux_Pack_Firmware/rockdev/package-file是否正确。打包会根据此文件进行分区打包。此文件链接会在./build.sh aio-rk3399j.mk命令时更新,如果配置不对请返回配置这一节重新配置一次。
整合统一固件
./build.sh updateimg
分区介绍
parameter
parameter.txt包含了固件的分区信息十分重要,你可以在device/rockchip/rk3399目录下找到一些parameter.txt文件,下面以parameter-debian.txt为例子做介绍:
FIRMWARE_VER: 8.1 MACHINE_MODEL: RK3399 MACHINE_ID: 007 MANUFACTURER: RK3399 MAGIC: 0x5041524B ATAG: 0x00200800 MACHINE: 3399 CHECK_MASK: 0x80 PWR_HLD: 0,0,A,0,1 TYPE: GPT CMDLINE: mtdparts=rk29xxnand:0x00002000@0x00004000(uboot),0x00002000@0x00006000(trust),0x00002000@0x00008000(misc),0x00010000@0x0000a000(boot),0x00010000@0x0001a000(recovery),0x00010000@0x0002a000(backup),0x00020000@0x0003a000(oem),0x00700000@0x0005a000(rootfs),-@0x0075a000(userdata:grow) uuid:rootfs=614e0000-0000-4b53-8000-1d28000054a9
CMDLINE属性是我们关注的地方。以uboot为例 0x00002000@0x00004000(uboot)中0x00004000为uboot分区的起始位置0x00002000为分区的大小。后面的分区规则相同。用户可以根据自己需要增减或者修改分区信息,但是请最少保留uboot,trust,boot,rootfs分区,这是机器能正常启动的前提条件。parameter-ubuntu.txt中使用的就是这样的最简分区方案。
分区介绍:
uboot 分区: 烧写 uboot 编译出来的 uboot.img. trust 分区: 烧写 uboot 编译出来的 trust.img misc 分区: 烧写 misc.img。开机检测进入recovery模式.(可省略) boot 分区: 烧写 kernel 编译出来的 boot.img.包含kernel和设备树信息 recovery 分区: 烧写 recovery.img.(可省略) backup 分区: 预留,暂时没有用。后续跟 android 一样作为 recovery 的 backup 使用.(可省略) oem 分区: 给厂家使用,存放厂家的 app 或数据。只读。代替原来音箱的 data 分区。挂载在/oem 目录.(可省略) rootfs 分区: 存放 buildroot 或者 debian 编出来的 rootfs.img,只读. userdata 分 区 : 存 放 app 临 时 生 成 的 文 件 或 者 是 给 最 终 用 户 使 用 。 可 读 写 , 挂 载 在 /userdata 目录下.(可省略)
package-file
此文件应当与parameter保持一致,用于固件打包。可以在tools/linux/Linux_Pack_Firmware/rockdev下找到相关文件。以rk3399-ubuntu-package-file为例介绍:
# NAME Relative path # #HWDEF HWDEF package-file package-file bootloader Image/MiniLoaderAll.bin parameter Image/parameter.txt trust Image/trust.img uboot Image/uboot.img boot Image/boot.img rootfs:grow Image/rootfs.img backup RESERVED
以上是SDK编译后生成的镜像文件。根据parameter.txt只打包自己用到的img文件。
-
嵌入式主板
+关注
关注
7文章
6092浏览量
35897 -
安卓
+关注
关注
5文章
2140浏览量
57943 -
Firefly
+关注
关注
2文章
540浏览量
7235
发布评论请先 登录
相关推荐
RK3399编译Ubuntu固件 ( GPT )资料推荐

fireflyAIO-3399C编译Industry固件简介
firefly3399PRO-JD4编译Ubuntu 固件简介

fireflyAIO-3399J主板介绍
fireflyAIO-3399J编译 Android 固件简介
fireflyAIO-3399J编译Buildroot固件简介
fireflyAIO-3288J简介编译Buildroot固件简介
fireflyAIO-3288J主板编译Ubuntu16.04固件简介






 工商网监
工商网监
评论