 微雪电子ICM20948 10轴惯性导航模块(D)简介
微雪电子ICM20948 10轴惯性导航模块(D)简介
拥有更强的性能和更低的功耗 适合穿戴设备 内置温度传感器 可进行温度补偿
型号 10 DOF IMU Sensor (D)

10轴惯性导航模块
产品简介【一分钟自我介绍】
我是10轴传感器,监测运动姿态是我的强项,我也可以告诉你方位、高度和温度。
如果你希望拥有更高大上的人机互动,希望DIY飞行器或自平衡机器人,那就带上我吧。
【我的基本情况】
板载低功耗ICM20948(3轴加速度、3轴陀螺仪和3轴磁力计),内置数字运动处理引擎,可减少复杂的融合演算数据,减轻处理器的负荷
相比MPU9250,精度更高,拥有更低的功耗,更适用于可穿戴设备
板载BMP280(气压高度计),内置温度传感器,可进行温度补偿
相比BMP180,拥有更强的性能和更低的功耗
通过I2C通信就能获取10轴数据
【我的参数】
供电范围:3.3V~5V(内部低压差稳压)
加速度计特性:
分辨率:16位
量程(可选):±2、±4、±8、±16g
工作电流:68.9uA
陀螺仪特性:
分辨率:16位
量程(可选):±250、±500、 ±1000、±2000°/sec
工作电流:1.23mA
磁力计特性:
分辨率:16位
量程:±4900µT
工作电流:90uA
气压高度计特性:
气压分辨率:0.0016hPa
温度分辨率:0.01°C
量程:300~1100hPa(海拔高度:+9000m ~ -500m)
气压相对精度(700hPa~900hPa,25°C~40°C):±0.12hPa(±1m)
工作电流(1Hz更新速率,超低功耗模式):2.8uA
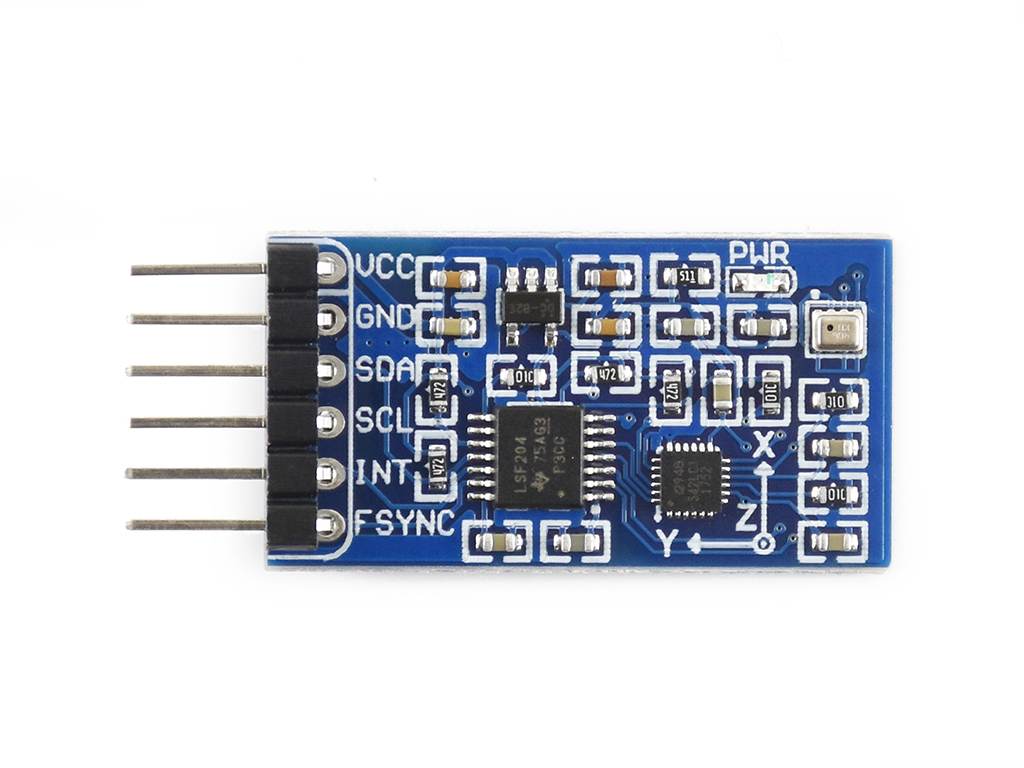
使用说明
| 引脚号 | 标识 | 描述 |
|---|---|---|
| 1 | VCC | 3.3V~5.5v电源 |
| 2 | GND | 电源地 |
| 3 | SDA | I2C数据线 |
| 4 | SCL | I2C时钟线 |
| 5 | INT | ICM20948数字中断输出 |
| 6 | FSYNC | ICM20948帧同步信号 |
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6085浏览量
35450 -
微雪电子
+关注
关注
9文章
873浏览量
6716
发布评论请先 登录
相关推荐
ICM-42670-P中文数据手册和开发套件:高性能 6 轴 Motion跟踪® IMU
ICM-42670-P 高性能 6 轴 Motion跟踪® IMU *附件:ICM-42670-P 数据手册 替代MPU6050.pdf *附件:IMU PCB 设计和 MEMS 组装指南.pdf
浅谈惯性导航产品的对齐安装角度
汽车导航系统、车队管理、运动和健身追踪以及机器人应用都离不开精准定位。这些应用通过可靠的GNSS(全球导航卫星系统)接收机实现必要的精确定位,通常还辅以惯性导航技术。
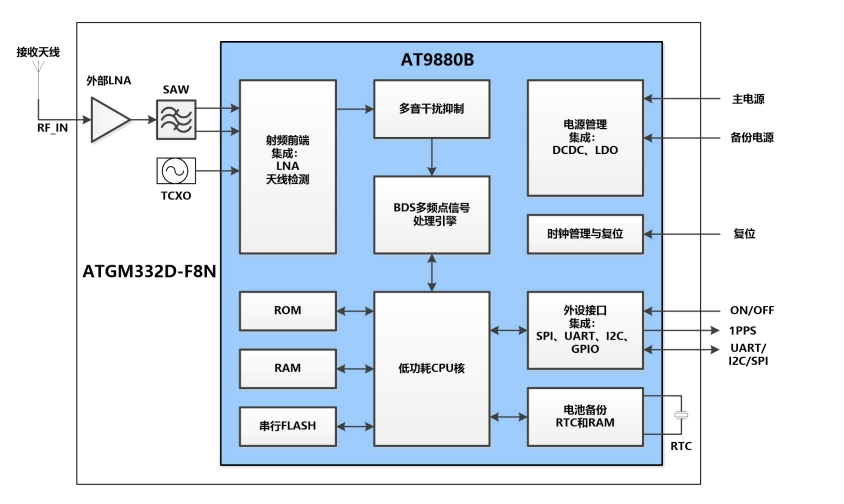
ATGM332D-F8N:高性能单北斗多频定位导航模块数据手册
一、ATGM332D-F8N概述: 1、ATGM332D-F8N系列模块是12.2×16mm尺寸的高性能单北斗多频定位导航模块。该系列模块产
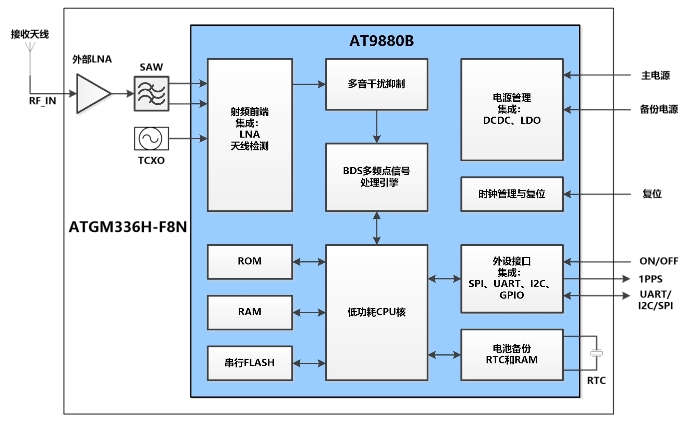
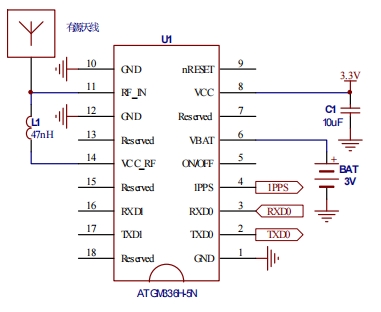
ATGM336H-5N杭州中科微BDS定位导航模块规格参数
ATGM336H-5N系列模块产品都是基于中科微第四代低功耗 GNSS SOC 单芯片—AT6558,支持多种卫星导航系统,包括中国的 BDS(北斗卫星导航系统),美国的 GPS,俄罗
ATGM336H-5N杭州中科微BDS/GNSS全星座定位导航模块电气参数
ATGM336H-5N系列模块是 9.7X10.1 尺寸的高性能 BDS/GNSS 全星座定位导航模块系列的总称。 产品选型: 性能指标: 出色的定位导航功能,支持 BDS/GPS
爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍
导航模块,六轴陀螺仪)。同时与第三方合作推出了基于爱普生角速度传感器和加速度传感器的具有三轴地磁信号检测的九轴陀螺仪。广泛应用在各类需要惯性

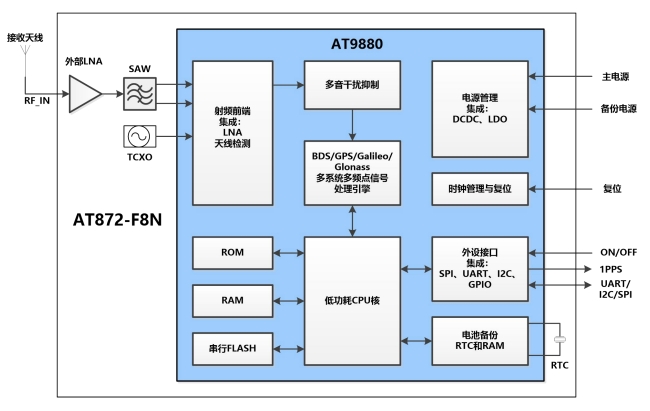
AT872-F8N高性能GNSS全模多频定位导航模块数据手册
AT872-F8N系列模块是一款尺寸为12.2×16mm的高性能GNSS全模多频定位导航模块。 AT872-F8N系列模块产品基于中科微新一代多频多系统GNSS SOC单芯片AT988
ATGM332D-F8N低功耗单北斗多频定位导航模块资料
单北斗多频定位导航模块的高精度定位优点描述: 1、多频信号融合:单北斗多频定位导航模块能够接收和处理来自北斗卫星系统的多个频段信号。通过多频信号的融合处理,可以显著提高定位的精度。因为不同频段的信号
高精度六轴MEMS运动跟踪TM器件ICM-42688-P 数据表
电子发烧友网站提供《高精度六轴MEMS运动跟踪TM器件ICM-42688-P 数据表.pdf》资料免费下载
发表于 08-12 16:38
•6次下载
AGV小车上的惯性导航模块运用——SGPM02
之前我们介绍过SGPM01系列陀螺仪模块在智能泳池清洁机器人导航的方案(SGPM01)。这款惯性导航模块收到了许多企业的欢迎。由此,爱普生推出了SGPM02系列陀螺仪

意法半导体发布LSM6DSV32X 6轴惯性模块
意法半导体近日发布了其最新的LSM6DSV32X 6轴惯性模块(IMU),该模块集成了高性能的加速度计和陀螺仪。加速度计的最大量程达到32g,而陀螺仪则具备高达4000度每秒(dps)
【行业前沿】量子技术+惯性导航,美国海军研究实验室的最新研究成果
和可靠的导航解决方案。美国海军研究实验室(NRL)最近开发出了一种新型量子导航工具——连续3D冷却原子束干涉仪(Continuous 3D-Cooled Atom Beam Inter
意法半导体推出一款LSM6DSV32X 6轴惯性模块(IMU)
意法半导体的LSM6DSV32X 6轴惯性模块(IMU)集成一个满量程32g的大加速度计和一个满量程4000度每秒(dps)的陀螺仪,可测量高强度的运动和撞击,包括自由落体高度估算。
爱普生高精度惯性导航模块赋能无人割草机新赛道
爱普生高精度惯性导航模块赋能无人割草机新赛道 对于海外的消费者来说,家庭割草服务一直是一个难题。无人自动割草机很好的解决了这个痛点。但是无人割草机在工作时由于信号丢失造成的路径混乱一直困扰着生产商们






 工商网监
工商网监
评论