 dfrobot数字舵机Arduino扩展板简介
dfrobot数字舵机Arduino扩展板简介

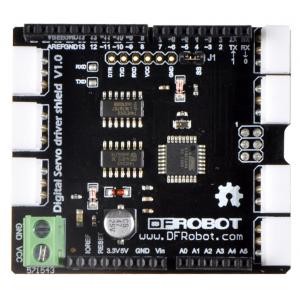


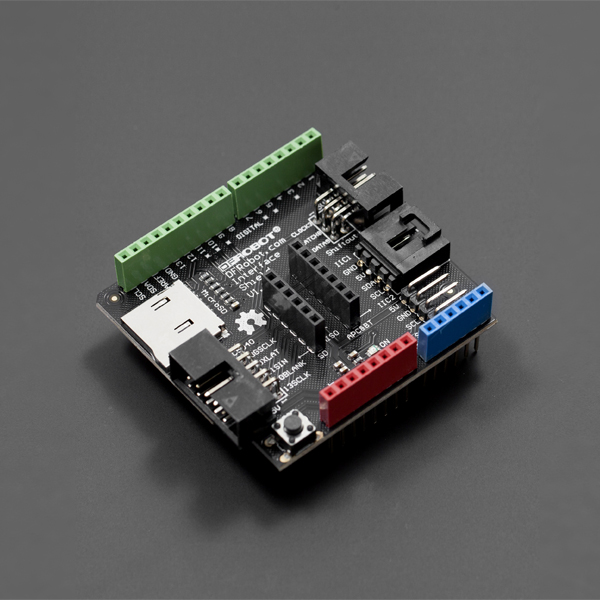
DRI0027是DFRobot研发的世界首款Arduino兼容的数字化总线式伺服舵机驱动板,能够为您解决机器人舵机控制领域的许多难题。该驱动板是DFRobot针对博创CDS5516数字总线式舵机设计的驱动扩展板,是您构建电子狗、蜘蛛等多足机器人的绝佳选择。最大特点是能够通过RS485串联各个数字舵机,实时的获得舵机关于运行状态的反馈。
该驱动板集成了半双工电路,UART能够同时连接所有CDS55系列舵机。这就是说当驱动板发出一个驱动信号,所有的舵机都能接受到该信号。但是由于信号中包含了具体舵机的身份代码,只有代码匹配的舵机才能执行该命令。
各个舵机之间可以通过串行总线连接,数量可达200多个!各个舵机可以即时反馈它的位置、转动速度、扭力、电流和电机温度等参数。该驱动板还能够驱动舵机360度旋转,速度可控,就同齿轮电机一般。总线舵机+DRI0027驱动板是你运行复杂机器人项目的绝佳选择。
数字总线伺服舵机能够解决以下传统舵机控制的问题:
1,利用传统方式搭建机器人,需要大量PWM信号接口和复杂的连线。经常接错线或者IO口不够用。
各个总线舵机可以利用RS485串联,然后并联到控制板上,大大节省IO口,简化接线。比如机器人舵机控制中,脚腕关键的舵机串到膝关节,一直串到髋关节,最后一根线直接接到控制卡上,甚至可以把所有的舵机都串进去。我们可以惊喜的发现,只需要1 接口,最多4个接口就可以搞定 20 个舵机了。
2,舵机自身不能存储中位修正值,修正值需要在发控制脉冲的时候补进去。浪费大量时间和代码进行修正。
我们可以利用数字总线舵机的反馈功能,直接手动矫正舵机的中位值,让后让控制器记住这个角度参数为正确的中位。节省了大量的修正代码。
3,普通舵机无法反馈自身的异常状态。而且舵机编程中的误差容易使舵机产生异常,而我们完全不知,最后导致舵机损坏。
我们可以实时监控舵机反馈的力矩、电流、电压、温度、转角等参数。如果发现异常以及时处理。CDS5516等数字总线舵机还具备异常报警功能,过流过温时立即停止电机。
技术规格- MCU:ATmega8
- 电源供应:6.5-12v
- 具备Arduino的SPI端口(数字口10,11,12,13)
- 兼容Arduino R3的扩展
- 兼容Uptech CDS5516系列舵机
- 引出UART的TR和TX端口,便于二次开发
- 7通道舵机接口,可串联200多个舵机
- 内置半双工电路,稳定可靠
- 沉金工艺,保证平整性和可焊性

该驱动板可以串联舵机,轻松控制我们的六足机器人(ROB0079),改变原有的控制模式。
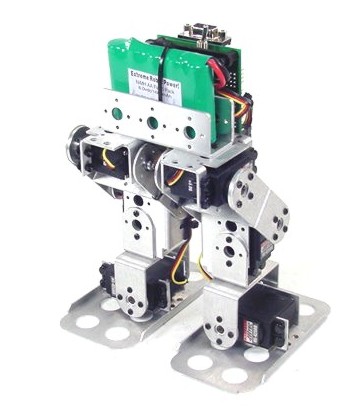
数字总线舵机驱动板是步行机器人平台(ROB0023)的最佳选择,一条腿上的舵机都可串联。
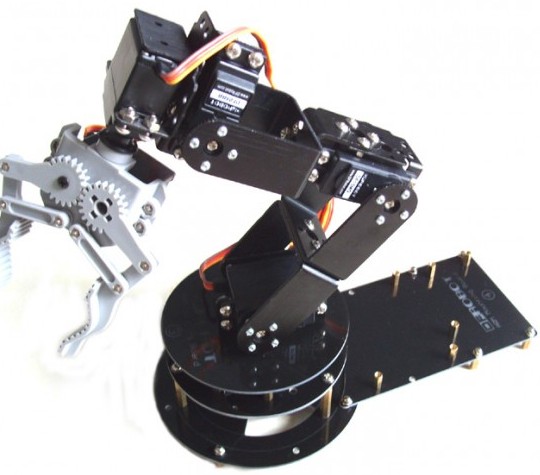
总线舵机驱动板控制的机械臂平台
-
嵌入式主板
+关注
关注
7文章
6085浏览量
35295 -
DFRobot
+关注
关注
4文章
1157浏览量
9507
发布评论请先 登录
相关推荐
基于具有Arduino Leonardo的树莓派扩展板的介绍

微雪电子BB Black扩展板|Arduino功能扩展简介
dfrobot接口扩展板简介
dfrobot IO扩展板 传感器扩展板简介

dfrobotArduino 树莓派扩展板简介

dfrobot以太网络扩展板-W5200简介

dfrobotBluno Accessory Shield扩展板简介

dfrobotXBee扩展板介绍

dfrobot Gravity I/O扩展板简介
dfrobotBoson扩展板(Gravity兼容)简介

dfrobot树莓派UPS电源扩展板(Zero版)简介
DFRobot Arduino扩展板-POE以太网络扩展板-W5500介绍







 工商网监
工商网监
评论