 dfrobotFlyMaple惯导控制器介绍
dfrobotFlyMaple惯导控制器介绍


产品简介
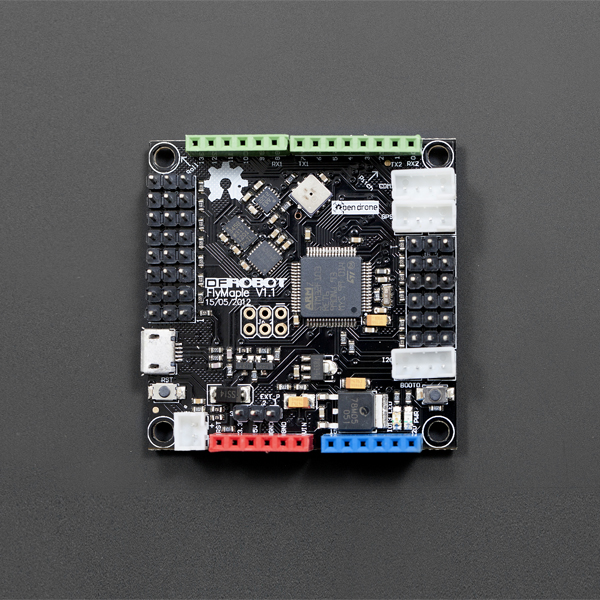
FlyMaple 是一个开源惯性导航控制板。可以用到例如四轴飞行器、固定翼无人飞机、两轮自平衡、三轴电子罗盘、登山高度计等需要姿态及其罗盘和气压计的项目。
FlyMaple基于maple开放的编程结构,使很多爱好者都可以加入进来进行二次开发。32位处理器高达90MIPS的运算可以满足复杂的计算需要。
应用领域- 多轴飞行器
- 两轮自平衡车
- 室内惯性导航
- 登山高度计
- 惯性遥控设备
- 使用STM32RET6 ARM 32位处理器,FLASH ROM 512K,RAM 64K,主频72MHZ
- 集成ITG3205 3轴陀螺仪
- 集成ADXL345 3轴加速度传感器
- 集成HMC5883 3轴电子罗盘
- 集成BMP085 高精度气压高度计
- 具备6路3PIN结构GPIO引出,可方便控制6路电调或舵机
- 具备8路3PIN结构GPIO引出,可用于捕捉航模RC接收器输出
- 支持USB供电与外部供电自动切换
- 具备外扩串口,可外接GPS模块
- 具备外扩I2C接口,可连接例如测量高度的超声波模块
- 具备外扩串口,可连接无线通信模块
- 另外引出了一个标准的Arduino排母插槽。可以在上面叠加一些Arduino Shiled扩展模块
- 输入电压:接上USB时无须外部供电或外部供7V~12V DC输入
- 输出电压:5V DC输出和3.3V DC输出 和 外部电源直接输出
- 尺寸:长50mm X 宽50mm X 高12mm
- 重量:15克
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6087浏览量
35672 -
DFRobot
+关注
关注
4文章
1159浏览量
9761
发布评论请先 登录
相关推荐
学惯导的人肯定会喜欢的两本书 (很难找)
学惯导的人肯定会喜欢的两本书:Strapdown inertial navigation technology by David H. Titterton and John L. Weston, 惯
发表于 01-17 21:38
高精度游移方位捷联惯导系统的数字仿真
高精度游移方位捷联惯导系统的数字仿真::捷联惯导系统的数字仿真对于系统设计、方案论证和算法研究有着重要的意义,特别是游移方位捷联惯
发表于 06-21 22:37
•19次下载
基于FPGA的惯导系统温控电路接口设计
本文介绍了一种基于FPGA 的光纤陀螺惯导系统温控电路接口设计。主要说明了温控电路整体结构,温控电路工作流程,FPGA 与外围电路的通信接口和FPGA 的逻辑设计等几个方面。
发表于 01-13 15:20
•24次下载
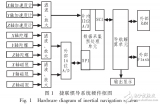
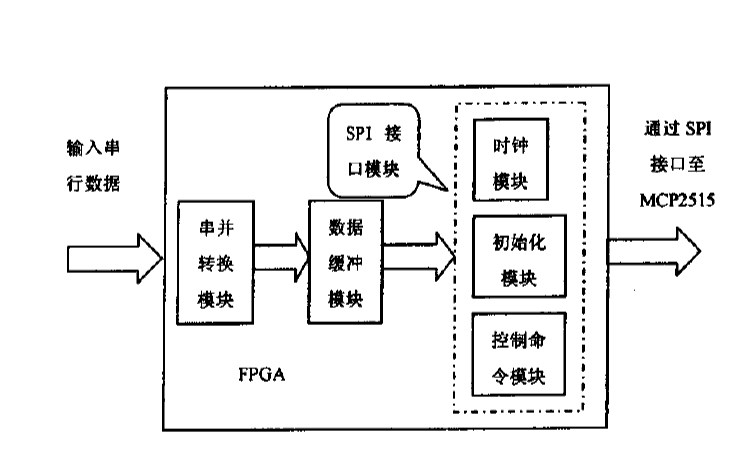
基于FPGA和CAN控制器MCP2515设计惯导系统的CAN总线
接口控制新型的CAN 控制器MCP2515,使惯导系统不仅具备了接入CAN 总线的能力,而且在系统实现之后,节点可以根据现场应用提出的新要求进行升级,增加了使用的灵活性。目前实验样机
发表于 07-13 17:43
•0次下载
MEMS传感器的捷联惯导系统设计中的应用
采用商用MEMS传感器设计一种小型捷联惯导系统。该系统利用外部16位AD高速采样芯片进行传感器数据采集,选用两片TMS320F28335DSP作为数据预处理单元和导航解算单元,同时在初
发表于 11-29 11:21
•22次下载
卡尔曼滤波在惯导初始对准中的应用
针对捷联惯导系统中初始对准的问题,本文采用了设计卡尔曼滤波器的方法,通过建立惯导系统的误差模型,分析卡尔曼滤波的基本理论,以东向和北向速度误
发表于 12-07 16:26
•3次下载
什么是惯导模块?惯导模块有什么用?
说到导航,很多人的第一反应就是基于GPS、北斗、GLONASS、GALILEO的卫星导航,最近SKYLAB推出了一个惯导模块,很多客户就开始懵了,什么是惯导模块,
惯导模块工作原理分析
说到导航,很多人的第一反应就是基于GPS、北斗、GLONASS、GALILEO的卫星导航,最近SKYLAB推出了一个惯导模块,很多客户就开始懵了,什么是惯导模块,
发表于 03-16 15:54
•40次下载
海上组合惯导的介绍(关于惯导在海上的应用)
海上组合惯导的介绍(关于惯导在海上的应用) 海上组合导航海上组合导航体系大致可分为简易型和大型两类。 简易型组合导航体系选用大规模集成电路、
发表于 03-28 10:19
•1996次阅读
GPS组合惯导的组成-惯导专题
GPS组合惯导的组成 惯性导航系统-INS是一种不依赖于外部信息、也不向外部辐射能量的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。惯导的基本工作原理是以牛顿力学定律为基
发表于 05-18 15:48
•3080次阅读
IMU和INS的区别-惯导专题
IMU和INS的区别 位置定位和姿态测量除了全球GPS定位这个系统,还有就是惯导系统。 这里简单介绍一下关于惯导的一些进本原理和所用的地方以
发表于 05-18 16:51
•5727次阅读
如何使用FPGA和CAN控制器MCP2515实现惯导系统的CAN总线接口的设计
接口控制新型的CAN 控制器MCP2515,使惯导系统不仅具备了接入CAN 总线的能力,而且在系统实现之后,节点可以根据现场应用提出的新要求进行升级,增加了使用的灵活性。目前实验样机
发表于 01-27 15:52
•17次下载





 工商网监
工商网监
评论