 dfrobot牛眼轮 万向轮简介
dfrobot牛眼轮 万向轮简介



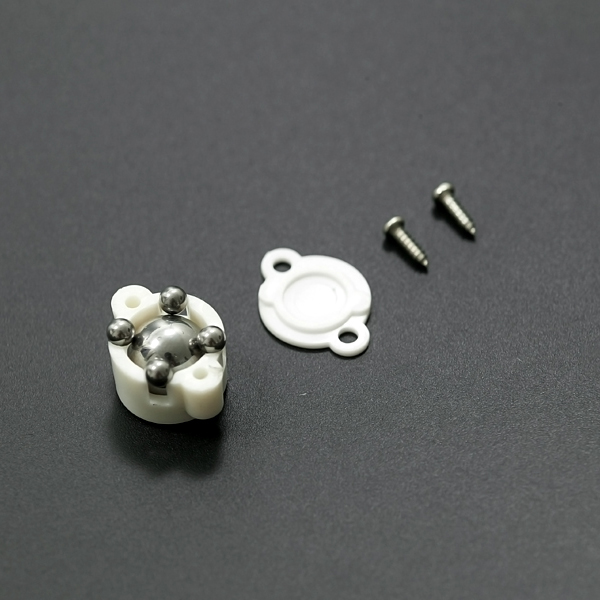
简介
牛眼万向轮,整体是由1mm厚的钢板在机床上冲压而成,载重可达15KG。
内置大钢珠周围有多达40颗小钢珠环绕,使主滚动钢珠转动更为流畅。
合理的结构设计以及精湛的加工工艺使配有此牛眼万向轮的机器人的运动更加灵活自如。
技术规格- 固定孔直径:4mm
- 固定孔位中心距:40mm
- 轮体总高度:20mm
- 牛眼钢珠凸出高度:4mm
- 牛眼钢珠直径:15mm
- 滑动小钢珠个数:40颗
- 最大载重:15KG
- 重量: 37g
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6087浏览量
35680 -
DFRobot
+关注
关注
4文章
1159浏览量
9769
发布评论请先 登录
相关推荐
求给一个测量直流电机转速的程序
求给一个测量直流电机转速的程序,可以同时测量2个的,因为是三轮小车,前面万向轮,如果谁有的话,又刚好看到帖子的话,希望你可以给我看看,谢谢!最后问一下如何让小车保持直线行驶,直流电机的小车。谢谢!
发表于 08-23 18:37
最近做了一个51智能小车,有没有做过一起进来的讨论一下?
我的小车是三轮那种,唯一有些不同的是我把别人那个万向轮做成了由舵机控制的了,所以感觉IO口有些不够用啊,现在只能同时进行避障+调速,或者是舵机控制万向轮+避障、不知道怎么处理这种事情?上图!
发表于 11-30 12:00
三轮循迹小车
用51控制一个三轮循迹小车,采用五路光电检测,还有一个轮子是万向轮,现在调节占空比是小车能够实现循迹,可是在走直线的时候,车子总是绕着黑线左右摆,请问有什么好的程序控制方法?
发表于 11-01 20:48
两轮+一个万向轮的避障小车,如何调整平稳性
最近在弄避障小车,两轮+一个万向轮的那种小车底盘,现在小车运行不能走直线,走着走着就偏了,还有左右转也转得不太好,如何调整呢,各位指点指点?下面是实物图
发表于 01-12 14:06
智能车的疑问
我们知道循迹小车可以沿着设置的跑到走,如果将跑到设置成直线就可以直走,我想问的是,如果做一个两轮驱动后边加有一个万向轮的有避障功能无寻迹功能的小车如果保证小车能走直线?
发表于 05-09 04:04
【KittenBot机器人试用体验】KittenBot小车组装
。kittenbot套件完整不用另外购买零件,还很贴心的配备了一把螺丝刀,是初学者的佳选。小车机身由金属打造,不怕摔,给小学生学习是再合适不过了。第一步——安装电机,轮子以及万向轮左电机右电机左轮右轮后万向轮前
发表于 07-15 19:20
arduino光电循迹搬运小车该用四轮车吗?
第一次做小车,想做一个可以循迹,可以分辨颜色把货物搬到对应颜色区域的小车 该用四轮车还是三轮其中一个是万向轮的车 循迹模块用TCRT5000红外反射传感器可以吗如果不行的话,有什么更好的推荐吗 最重要的是用什么让小车分辨颜色还没
发表于 09-25 22:47
移动机器人底盘主要包含哪些设备
。也有底盘不用底盘控制器,电脑直接控制电机驱动器,构成最简单的机器人底盘。一、差动底盘差动底盘主要由两个直流电机、前后两个万向轮构成。万向轮采用减震设计,保证四个轮子同时接地,避免出现打滑现象。V=(Vr+Vl)/2 左右轮的速
发表于 09-07 06:15
智能小车PCB底板的相关资料推荐
说起亚克力板智能小车,大家肯定都见过,用过三轮式两个前驱动轮,加一个后万向轮,通过两前驱动轮差速进行转向,比如左轮前进,右轮停止或者后退,则进行右转弯,万向轮的存在,使得转向平滑。优点
发表于 01-19 07:58
基于RT-Thread+RA6M4的麦轮结构的底盘运动控制系统设计案例
,使其驱动4个麦轮的电机。其地盘可实现全向移动,即平面的纵向,横向移动和原地的旋转移动。应用背景在目前移动机器人开发中,除了仿生结构的机器人之外,麦轮结构的移动机器人和万向轮结构的移动机器人使用频率也
发表于 08-17 14:50
dfrobot3PI miniQ 小车万向轮简介
这款MiniQ机器人专用钢珠轮采用白色ABS塑料外壳、直接0.375英寸(0.9525cm)钢珠、两片垫片(0.158cm和0.125cm厚)和两个2号螺纹孔。在不加入垫片的情况下,钢珠轮的高度为1.016cm。用户也可以加上垫片来增加高度。这款钢珠





 工商网监
工商网监
评论