 dfrobotDSS-P05机器人专用舵机介绍
dfrobotDSS-P05机器人专用舵机介绍
产品简介
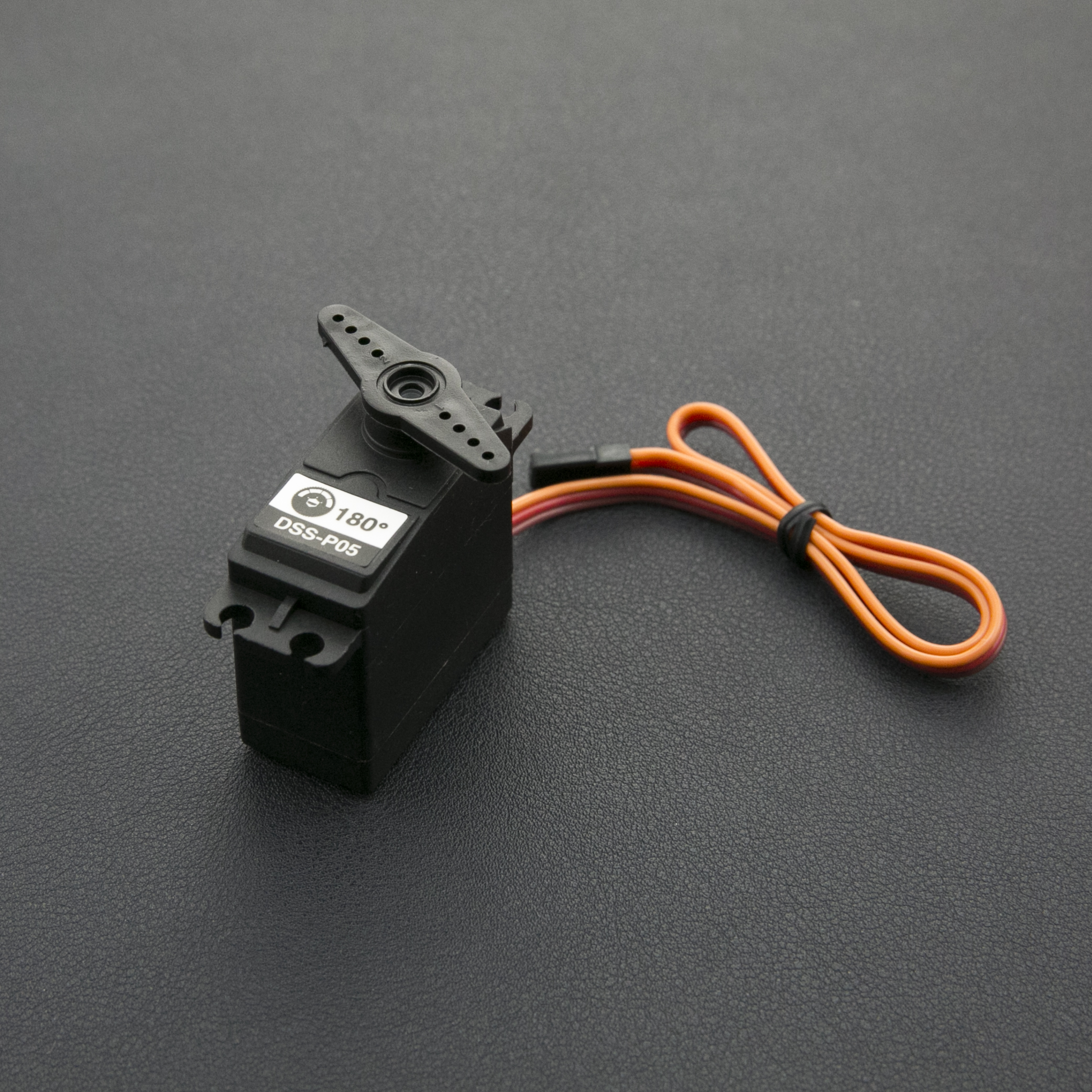
DSS-P05舵机是DFRobot出品的优质舵机,具有控制精度高、响应速度快等优点。经常被用在多足机器人、机械臂和监控云台等产品上。舵机采用金属齿轮和双轴承结构,耐磨耐用。在一些负载大或者长期运作的项目上面,能够充分保证项目的稳定性。附带的舵机盘和齿轮能够让你省去很多固定的麻烦。
另外,这款舵机搭配Arduino控制平台后简单易用。舵机的3P线可以直插在arduino IO扩展板上。Arduino自带的servo库能够帮你轻松驱动这款舵机。
注意:DSS-P05舵机已经代替了旧版的DF05BB
技术规格- 工作电压:4.8-6.0V
- 扭矩大小:3.5kg*cm(4.8V)/4.5kg*cm(6.0V)
- 无负载速度:0. 17秒/60度(4.8V)/0.4秒/60度(6.0V)
- 使用温度:0-60摄氏度
- 死区设定:20微秒
- 尺寸:40.2x20.2x43.2mm
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6086浏览量
35555 -
DFRobot
+关注
关注
4文章
1159浏览量
9669
发布评论请先 登录
相关推荐
什么是龙人四足机器人?
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可
发表于 03-24 16:17
用Arduino调试Rapiro机器人
要注意,舵机上电后是不能强行用外力扭动的,不然舵机必坏! 附件中有英文版的组装图。 机器人组装完后,开始调试打开电脑的Arduino IDE软件(我不专门介绍安装了,自己度娘),用mi
发表于 08-10 20:19
【开发教程5】人形街舞机器人-舵机的基本控制
74HC244 来增加输出电流。另外,机器人的头部舵机的信号线是通过 P27 与 74HC244 相连间接控制的。图 23软件设计本次我们是通过定时器 T0 控制 IO 口输出高低电平的时间来输出 PWM。首先
发表于 05-13 16:00
【开发教程8】疯壳·人形街舞机器人-多个舵机不同速率转动
多自由度人形双足舞蹈机器人——疯壳·机器人开发系列多个舵机不同速率转动 1相关简介 本章将介绍两个舵机的不同速率转动原理以及代码实现
发表于 07-25 11:39
【教程5】人形街舞机器人-舵机的基本控制
74HC244 来增加输出电流。另外,机器人的头部舵机的信号线是通过 P27 与 74HC244 相连间接控制的。图 23软件设计本次我们是通过定时器 T0 控制 IO 口输出高低电平的时间来输出 PWM。首先
发表于 08-16 11:43
【教程8】人形街舞机器人-多个舵机不同速率转动
多自由度人形双足舞蹈机器人——疯壳·机器人开发系列多个舵机不同速率转动 1相关简介 本章将介绍两个舵机的不同速率转动原理以及代码实现,多个
发表于 08-18 17:25
dfrobotHerkuleX DRS-0101 机器人专用舵机介绍
韩国著名的Dongbu机器人公司出品的HerkuleX DRS-0101 机器人专用舵机可能是目前市场上最好的一款机器人






 工商网监
工商网监
评论