 dfrobotDevastator履带机器人移动平台简介
dfrobotDevastator履带机器人移动平台简介



产品简介
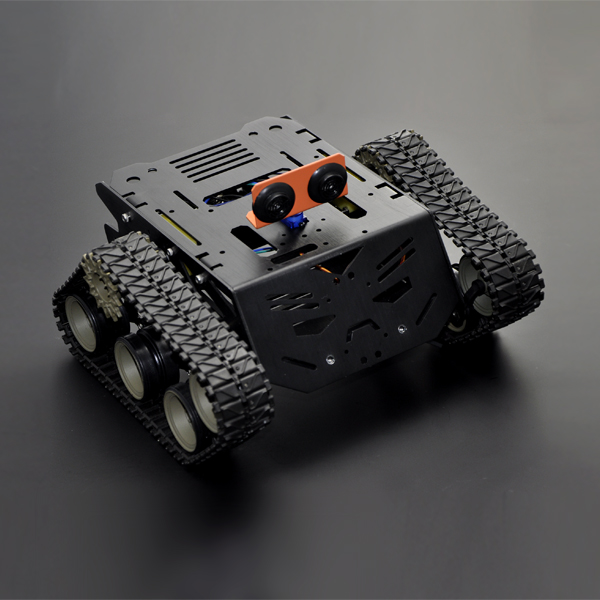
Devastator是DFRobot自主研发的第二代履带机器人平台。机身采用高强度铝合金材质,由于第一代极具现代感的外形设计深厚不少用户的青睐,第二代在保留原有外形基础上,电机性能上做了优化处理。不同于第一版,第二版采用全金属直流电机。金属电机相对塑料电机转速提升4倍之多。扭矩也大大提升。载重能力也从原来的1.5kg提升为3kg。Devastator绝对让您拥有履带机器人应当具备的特有的越障,爬坡性能。
除此之外,此套件最大特色在于电机采用免焊接设计,用户可直接通过接插方式轻松连接电机,再无需繁琐的焊接过程。
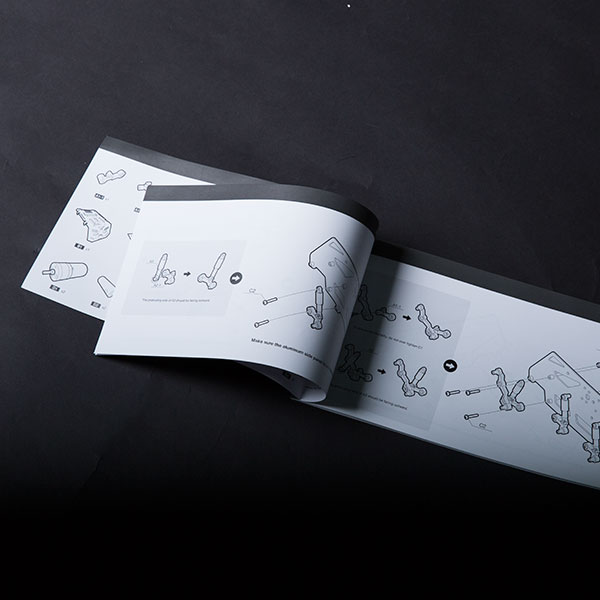
Devastator配有详细的安装使用说明,让您的安装体验更为流畅,上手更容易。可点击预览安装使用说明书。
Devastator机身顶部多孔位设计和底部直线型设计,使安装方式更为灵活,您可按不同造型需求找到合适的安装孔位。兼容各类主控,传感器,及舵机云台。例如市面上流行的Arduino,Raspberry pi等各类主控。
当然,Devastator也为DFRobot各类舵机扩展平台度身打造。适用于DFRobot各类大小舵机云台支架。非常适合各种机器人比赛项目。目前支持以下几种现有舵机云台:
*云台舵机支架套件
*迷你2自由度云台
*全方位蜂巢云台
Desvastator(金属电机版)被选为Intel@Edison芯片专用机器人平台。详情可见Intel@Edison官方网站

注意:本品不包含图示的超声波传感器和内部的主控板
注意事项- 1. 本套件以散件的形式提供,需要根据包装内的说明书自行组装,如需工具,点击购买。螺丝刀购买链接
- 2. 本套件为机器人移动平台,不提供电子模块,如需配套电子模块,可查看说明书推荐产品页(组装说明书/rob0128说明书cn.pdf)
- 2. 电机线接插时,注意不要过于用力,避免损坏电机接口。
- 额定电压: 6 V
- 工作电压: 2~7.5V
- 齿轮箱减速比: 45:1
- D轴输出直径: 4 mm
- 空载转速: 133 rpm@6V
- 空载电流: 0.13 A
- 堵转力矩: 4.5 kg.cm
- 堵转电流: 2.3 A
- 载重: 3kg
- 尺寸: 225*220*108 mm(安装后)
- 重量: 1.3kg
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6085浏览量
35293 -
DFRobot
+关注
关注
4文章
1157浏览量
9499
发布评论请先 登录
相关推荐
分享我的履带机器人全部资料
本帖最后由 小歪 于 2012-7-2 11:09 编辑
分享我的履带机器人全部资料,含各种源程序,为限制身材,资料做了精简,删掉的都是网上能下载到的,原帖看这里:https
发表于 07-02 10:41
分享履带机器人 凯炫路克
本帖最后由 威凯-智控 于 2012-8-8 07:42 编辑
最炫动的履带机器人它的名字叫“凯炫路克”将给你带来强悍视觉震撼,和无暇的想象空间!让思维沸腾起来 让智慧行动起来 精彩尽在凯炫路克!
发表于 08-08 07:41
履带机器人 金属底盘
` 本帖最后由 威凯-智控 于 2012-8-14 23:28 编辑
今天给大家分享一个全金属的履带机器人底盘准备最履带机器人的朋友们,可以一起交流一下
发表于 08-14 23:25
【TL6748 DSP申请】带拍摄功能的履带式智能机器人
申请理由:我们正在研发设计带航拍功能的履带式智能机器人,主要用于一些不适合人员直接去工作的区域进行实施操作。它的核心控制芯片我们用的也是TMS320系列的芯片,现在的基本元器件已经购买完成,正在讨论
发表于 09-10 11:16
【Tisan物联网申请】可移动式wifi履带式机器人系统研制
申请理由:此开发板具有强大的wifi性能,本人进行wifi机器人控制系统的研究需要该开发板项目描述:初步方案是用此款wifi开发板进行履带机器人系统搭载的图像信息采集模块,对采集到的图像数据进行回传的操作。
发表于 10-15 10:09
履带式移动机器人的设计
作为一个技术宅,我对机器人和单片机很感兴趣。在这里我把自己做过的一款履带式移动机器人的资料分享给大家。欢迎大家吐槽!同时也希望对做机器人的同学有帮助。 该
发表于 07-27 18:28
机器人、协作机器人和移动机器人,你分的清楚吗
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。我想每个人都知道机器人是什么。机器人是可怕的大型
发表于 10-30 11:33
如何实现移动机器人的设计?
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
发表于 11-23 15:08
机器人简介
一.机器人简介:机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的
发表于 09-07 06:05
机器人系统与控制需求简介
第二章 机器人系统与控制需求简介2.1 工业机器人的系统组成机械本体:精密减速机、伺服电机、伺服驱动器、控制系统(核心零部件)控制柜示教盒2.2 机器人本体结构与传动方式
发表于 09-08 07:44
六足机器人轮式移动方式的优势
科学技术发展和人类社会进步的需要。地形不规则和崎岖不平是这些环境的共同特点。从而使轮式机器人和履带式机器人的应用受到限制。以往的研究表明轮式移动方式在相对平坦的地形上行驶时,具有相当的
发表于 09-13 06:47
微小型履带式移动机器人与地面交互特性分析
为实现对微小型履带式移动机器人的最优控制,以微小型覆带式移动机器人原型为基础,利用ADAMS建立该机器人的模型,并设置材料属性、关节等,并根据实际情况施加各种受力,通
发表于 08-06 23:05
•25次下载
移动机器人的分类与移动机器人技术研究现状和未来发展的分析
移动机器人分类 移动机器人从工作环境来分0可分为室内移动机器人和室外移动机器人1按移动方式来分!轮式移动
发表于 09-16 09:18
•13次下载
dfrobotDevastator履带机器人移动平台简介
Devastator Tank Mobile Platform 履带机器人是DFRobot 研制的机器人实验平台,该平台不但可以使用当前流行






 工商网监
工商网监
评论