 dfrobot 肌电传感器简介
dfrobot 肌电传感器简介



简介
DFRobot首次与OYMotion跨界合作,引入全新肌电生物检测技术,获取人体表面肌电信号(sEMG),可用来观察和分析人体肌肉和神经的活动情况,从而实现动作识别,手势控制等交互控制,可用于人机交互、人体工程、运动科学等相关应用。
本传感器模块集成了滤波、放大电路,将范围在±1.5mV内的微弱人体表面肌电信号进行1000倍放大,并通过差分输入、模拟滤波电路的方式对噪音(特别是工频干扰)进行有效抑制。输出信号为模拟量形式,以1.5V为基准电压,0~3.0V量程的输出。输出信号的大小取决于选定肌肉的活动量,输出信号的波形可显著指示被观察位置皮下肌肉的运动情况,方便做肌电信号的分析与研究,如使用Arduino作为控制器检测肌肉活动情况,从而进行手势识别等。
本产品是一种主动感应传感器,能提供高质量的信号搜集,且易于使用。不论是被用到静态还是动态的应用领域,仅需要一些极为简单的准备工作即可。本产品使用干电极,无须导电凝胶也可得到良好的信号质量,因此具有寿命长、使用简单方便等特点,更适合普通用户。而采用凝胶探头的医用电极通常为一次性,使用起来较为麻烦。
本产品的测量具有非侵入性、无创伤、操作简单等优点,可用于人机交互、人体工程、运动科学等相关应用。虽然测量肌肉活动历来被用于医学研究,然而随着不断缩小但功能更强大的微控制器和集成电路的完善,肌电图电路和传感器也逐渐被应用于各种控制系统。
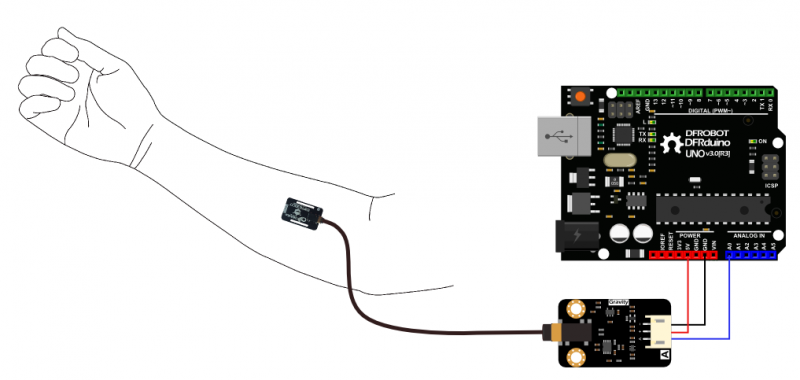
【使用示意图.png】
注意:
1. 供电电压在3.3~5.5V之间,供电电流不小于20mA,纹波与其他噪音要小。推荐使用经过稳压的直流电压。
2. 肌电信号的有效频谱范围为20Hz~500Hz,推荐采用分辨率不低于8bit、有效采样频率不低于1KHz的模数转换器(ADC)进行采样与数字化,以保留尽量多的原始信息。
3. 采用配套的金属干电极板,需将电极板保持和肌肉方向一致。
4. 本品并非专业医疗仪器,不能作为辅助配件参与诊断和治疗。
特性
干电极探头,无需导电凝胶,方便易用
差分输入,高共模抑制比,可有效抑制噪声干扰
低功耗设计
单电源供电
技术规格
信号处理板
供电电压:+3.3V~5.5V
工作电压:+3.0V
检测范围:+/-1.5mV
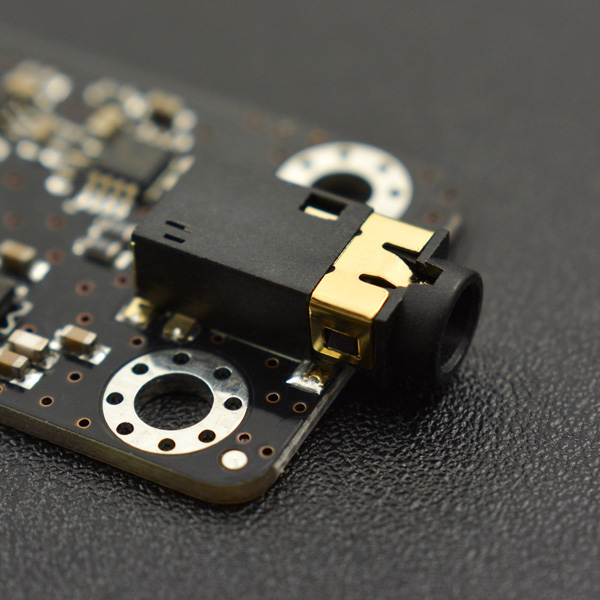
电极接口:PJ-342
模块接口:PH2.0-3P
输出范围:0~3.0V
工作温度:0~50℃
板子尺寸:22 * 35 mm
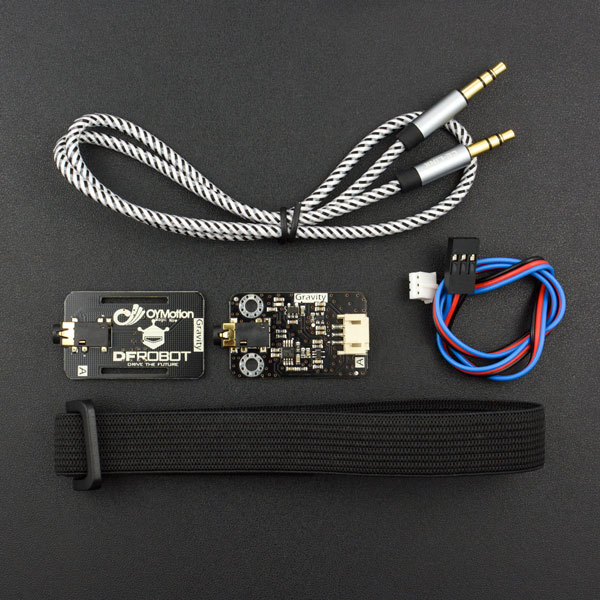
干电极板
电极接口:PJ-342
电极线长:50cm
板子尺寸:22 * 35 mm
重量:36g
-
嵌入式主板
+关注
关注
7文章
6092浏览量
35829 -
DFRobot
+关注
关注
4文章
1160浏览量
9904
发布评论请先 登录
相关推荐
光电传感器与激光传感器的对比
光电传感器在智能家居中的应用
光电传感器故障排查技巧 光电传感器与机器视觉的结合
如何选择合适的光电传感器 光电传感器在自动化中的应用
光电传感器与其他传感器的区别
光电传感器应用领域 光电传感器工作原理解析

使用指南 | 光电传感器安装技巧,确保高效与稳定的秘诀






 工商网监
工商网监
评论