 电波校时钟的制作
电波校时钟的制作
简介:
手头有一个项目,需要一个“精确”的频率计,作为DIY一族,准备动手制作一个。在制作频率计之前,需要一个 能精确测量晶振频率的东西。之前尝试过NTP对时,发现精度太差,不好使。所以准备改用电波对时。百度搜了一下,动手做电波表的朋友还真不少, 但讲得不够详细,解码部分还是“保密”的。只好尝试自立更生了。
BPC电波钟模块
电波对时需要一个接收头,接收授时中心发出的电波信号。我们国家的授时信号频率为68.5Khz,发射台在商丘。 接收头实际上是一个窄带信号接收器,其带宽只有几个赫兹,通常采用晶体滤波器来限制接收带宽。由于工作频率比较低,放大部分是比较 容易设计的,有一定无线电基础的都可以做出来。
这里我们直接从某宝上买来一个完整的电波钟模块。花了15大洋,省了很多事。

BPC模块上用到的引脚有4条。
VCC :电源,1.5~3.5V
GND :地
SIG :BPC授时信号输出
EN :模块使能(低电平使能,高电平关闭模块)
BPC解码和校时
电波钟模块输出的BPC信号如下图,1分钟包含3个帧,一个BPC帧的周期为20秒,除了第“0”秒外,其余19秒每秒一个 脉冲。方波秒脉冲有0.1S,0.2S,0.3S,0.4S四种脉冲宽度状态,分别表示四进制的0, 1, 2, 3,现有的时间编码都以二进制表示时间信息, 是为了采用微处理器解码方便。但四进制只是数值的一种表示方式,并不影响微处理器把它作为二进制处理,或者采取简单的变换就可将1位 四进制数变成2位二进制数。
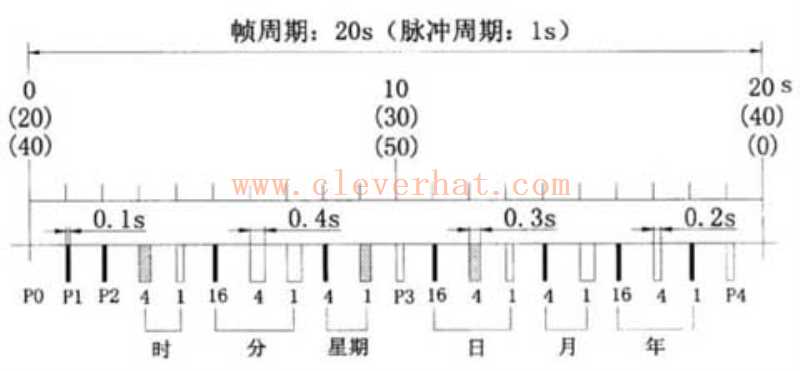
P0设在每分钟0,20, 40秒,以缺少秒脉冲使帧与帧隔开,同时作为帧起始预告。
P1为帧标志,P1=0表示帧起于第1秒,P1=1表示帧起始于21秒,P1=2表示帧起始于41秒。帧标志是必需的,它用来确定整分的起始。 例如:当接收完一组包含着“10时38分”的时间编码时,如果帧标志标明该帧为第二帧,就可以把下一帧的P1位置标定为10时38分41秒, 再过20秒便是10时39分的起始。
P2为预留位。用于需要扩充信息。
时&分表示了时间
其他各位数据在本案中没有用到,不做详细说明
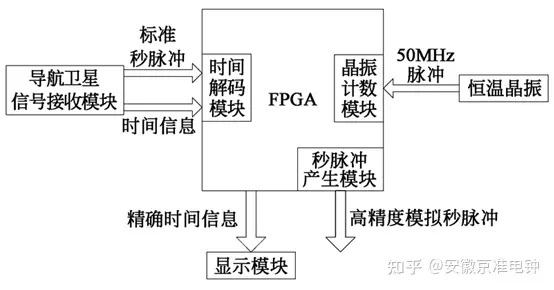
解码MCU采用了TI公司的MSP430G2211IPW14,MSP系列的MCU以低功耗著称,非常适合于电池供电的应用。本例中, MCU大部分时间工作在约20uA的低功耗模式下。
BPC解码软件使用了MSP430G2211的TimeA,TimeA的计数器由32768Hz的晶振提供时钟,从0~0xFFFF循环计数。每2秒 循环一周。BPC信号接在MCU的中断请求上,在上下跳变沿均产生中断,中断服务程序中读取TimerA计数器。根据脉冲宽度解码BPC编码的信号。 由于BPC信号的最小脉宽为0.1秒,软件中还加入了滤波处理,可以滤除脉宽较窄的干扰信号。
if (MCU_INT_GET(BPC_SIGNAL_PORT, BPC_SIGNAL_PIN)) { static uint16 wPrevToggle = 0; //前一次跳变时刻 static uint16 wLastPulseWidth = 0; //前一次脉冲宽度 static uint8 bLastPulsePolarity = 0; //前一次脉冲极性(1:正脉冲,0:负脉冲) static uint8 ucBpcBitPos = 0xFF; //BPC解码位置,0xFF表示解码状态机复位 static uint8 ucBpc[2]; //BPC码数据,只取包含“时:分:秒”信息的前面2字节。 uint16 wCurToggle; //本次跳变时刻 uint16 wCurPulseWidth; //本次脉冲宽度 uint16 wBpcSecond; //BPC解码得到的时间秒数 uint8 bCurPulsePolarity; //本次脉冲极性(1:正脉冲,0:负脉冲) uint8 ucTmp; MCU_INT_XOR_EDGE(BPC_SIGNAL_PORT, BPC_SIGNAL_PIN); MCU_INT_CLEAR(BPC_SIGNAL_PORT, BPC_SIGNAL_PIN); //正跳变,表示的是负脉冲(结束) bCurPulsePolarity = MCU_INT_GET_EDGE(BPC_SIGNAL_PORT, BPC_SIGNAL_PIN) ? 0 : 1; wCurToggle = GetCurTimerA(); wCurPulseWidth = wCurToggle - wPrevToggle; if ((wCurPulseWidth 《 PULSE_FILTER_OUT) || (bCurPulsePolarity == bLastPulsePolarity)) { //本次跳变脉宽过短,将当作干扰毛刺被过滤掉,脉宽同前一次合并 //本次脉宽极性同前一次相同(跟在干扰毛刺后),脉宽也同前一次合并 wLastPulseWidth += wCurPulseWidth; } else { //前一次脉宽数据有效,可以处理了。 if (!bLastPulsePolarity && (wLastPulseWidth 》 PULSE_10ms * 100)) { //每帧数据头部有1秒时间的空档期,表示帧起始 ucBpcBitPos = 14; //只用到前14bit数据 ucBpc[0] = ucBpc[1] = 0; } else if (ucBpcBitPos != 0xFF) { if (!bLastPulsePolarity) { //负脉冲 if (wLastPulseWidth 《 PULSE_10ms * 55) //BPC编码正脉冲宽度最小600ms,《550ms为非法,解码状态机复位 ucBpcBitPos = 0xFF; } else { //正脉冲 ucTmp = 0xFF; if (wLastPulseWidth 《 PULSE_10ms * 45) { if (wLastPulseWidth 》 PULSE_10ms * 35) //400ms脉宽 ucTmp = 3; else if (wLastPulseWidth 》 PULSE_10ms * 25) //300ms脉宽 ucTmp = 2; else if (wLastPulseWidth 》 PULSE_10ms * 15) //200ms脉宽 ucTmp = 1; else if (wLastPulseWidth 》 PULSE_10ms * 5) //100ms脉宽 ucTmp = 0; } if (ucTmp == 0xFF) { //脉宽非法,解码状态机复位 ucBpcBitPos = 0xFF; } else { //保存合法数据 ucBpcBitPos -= 2; ucBpc[ucBpcBitPos 》》 3] |= ucTmp 《《 (ucBpcBitPos & 0x07); if (ucBpcBitPos == 0) { //一帧数据接收完成 ucBpcBitPos = 0xFF; //解码状态机复位,等待下次数据 wBpcSecond = ((ucBpc[1] 《《 2) | (ucBpc[0] 》》 6)) & 0x0F; //小时 wBpcSecond *= 3600; wBpcSecond += ((uint16)(ucBpc[0] & 0x3F)) * 60; //分钟 wBpcSecond += ((ucBpc[1] 》》 4) & 0x03) * 20 + 21; //秒数 //如果相临近的两次BPC校时都是准确的(没有误码),守时中断应该在BPC //信号的边界前后,因此,秒数只可能差0或1秒。据此判断校时成功 if ((wBpcSecond - s_wRealSecond) 《 2) s_wEvent |= BPC_FINISHED; s_wRealSecond = wBpcSecond; s_wTarSecond = wCurToggle + COUNT_1S; } //if (ucBpcBitPos == 0 } } } wPrevToggle = wCurToggle; wLastPulseWidth = wCurPulseWidth; bLastPulsePolarity = bCurPulsePolarity; } }
守时信号输出
TimerA的通道0工作在比较器模式,用作守时和UART波特率发生器。时间以12小时内的秒数表示,从00:00:00或12:00:00 开始计数,在每秒开始时将时间读数从UART口发出去。MSP430G2211没有专用的UART,需要软件实现。UART数据格式为8位、无校验、1200波特率。总共 16bit数据,需要用2个字节表示,加上每字节的起始位、停止位,总共20位。
#pragma vector=TIMER0_A0_VECTOR __interrupt void Uart_ISR(void) { static int8 iBits = 0; static uint16 wMask; TACCTL0 &= ~TAIFG; //清中断 //每秒起始位置把16bits实时时间通过UART发送出去 if ((iBits == 0) || (iBits == 10)) { MCU_IO_CLR(UART_TX_PORT, UART_TX_PIN); //起始位 } else if ((iBits == 9) || (iBits == 19)) MCU_IO_SET(UART_TX_PORT, UART_TX_PIN); //停止位 else { //发送数据位 if (s_wRealSecond & wMask) MCU_IO_SET(UART_TX_PORT, UART_TX_PIN); else MCU_IO_CLR(UART_TX_PORT, UART_TX_PIN); wMask 《《= 1; } iBits++; if (iBits == 20) { //实时时间发送完毕,准备在下一秒再次发送 s_wTarSecond += COUNT_1S; TACCR0 = s_wTarSecond; s_wRealSecond++; if (s_wRealSecond 》= ((uint16)12*3600)) s_wRealSecond = 0; iBits = 0; wMask = 1; s_wEvent |= SECOND_EVENT; } else TACCR0 += UART_BIT_WIDTH; __low_power_mode_off_on_exit(); }
守时时钟校准
本系统需要依靠标称频率为32768Hz晶振提供时间基准来守时,晶振负载电容对频率有微调作用。为了测定晶振实际工作 频率,可测量一段时间内的积累误差。例如在10:00:00时进行第一次BPC校时,6个小时后在16:00:00进行第二次BPC校时,用串口工具接收并打印出 第二次BPC校时前后从UART口输出的守时信号
校时之前
【2017-10-11 15:58:47:850】CB 0D
【2017-10-11 15:58:48:850】CC 0D
校时之后
【2017-10-11 15:59:47:827】07 0E
【2017-10-11 15:59:48:827】08 0E
从打印出来的数据可以看出,在校时前后两点(0x0E08-0x0DCC = 60秒),对应PC机系统时间为59:48:827-58:48:850 = 59.977秒,也就是说6小时内积累的误差为-0.023秒,可以忽略不计。否则可能需要调整负载电容来对频率进行微调,或者也可以调整代码中的 COUNT_1S的宏定义值来重新标定“1秒”。
机芯驱动
本设计初衷是要制作一个能够准确计时(无累积误差)的东西。因此完成守时信号输出就OK了,但既然动了手,就准备弄个 完整的电波钟玩玩。拆解了一个多时不用的石英钟,只将机芯步进马达的线圈引出,其他电路统统拆掉。这里我范了一个错误,本以为马达是1秒 走一步或二步,按此设计了驱动代码,结果马达跑得非常别扭,走走退退,不知怎回事,弄了半天才发现问题所在,实际上这个机芯步进马达是每秒16步 的,差得也太远了。因此,建议朋友在拆机前先测一下原机的驱动波形。
这种步进电机的驱动信号为正负交替的脉冲信号。脉冲宽度需要有个合理的范围,拆机时没有先用示波器测一下,只好自己 凑了。不过,就算测了也只能供参考,因为原机是1.5V供电的,现在改成3V,脉宽肯定需要调窄,理论上升到2倍电压后脉宽应是原来的1/4.我的这个马达 用12ms脉宽驱动,工作得很Happy.朋友自己制作时可以自行调整MOTOR_PULSE_DUTY。
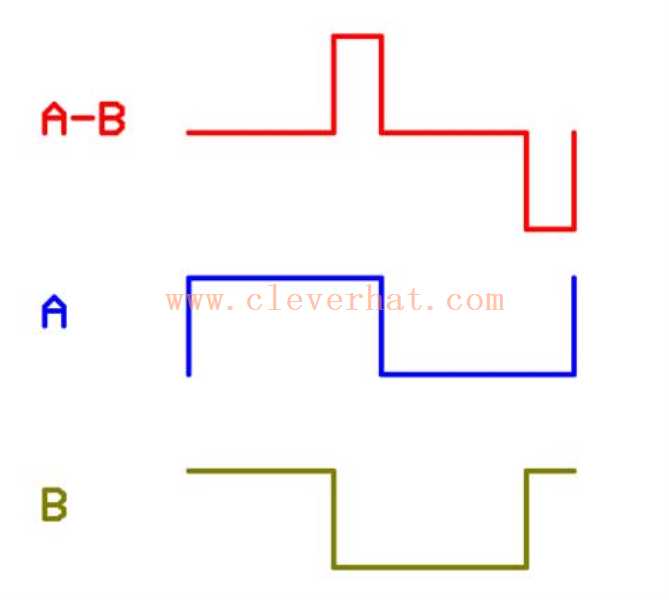
为了实现正负极性的交替,使用了2个IO端口(石英钟机芯马达不分极性直接连在这两个端口上就行了),输出两路移相的方波信号。两路方波信号之间的相差即为脉冲宽度。当钟面显示 的时间同实际时间有偏差时,需要改变脉冲周期以调整电机速度,使两者趋于一致。机芯驱动使用了TimeA的通道1,在其中断服务中实现
#pragma vector=TIMER0_A1_VECTOR __interrupt void Motor_drv_ISR(void) { if (TACCTL1 & CCIFG) { // 步进电机驱动信号,一个周期分4个Stage,电机走2步。 // S1,S3提供动力输出。 // ------ // | S1 | // | | // --------------| |--------------| | // S0 S2 | | // | | // ------ // S3 static uint8 ucStage = 0; //步进电机每走一步分2个stage。 uint16 wS0S2; //S0,S2时间长度 TACCTL1 &= ~CCIFG; //清中断 if (ucStage == 2 * STEP_1S - 1) { //每秒末进入此处 ucStage = 0; s_wDisplaySecond++; if (s_wDisplaySecond 》= ((uint16)12 * 3600)) s_wDisplaySecond = 0; } else ucStage++; //先假定钟面时间总是偏“快”的,算一下“快”了多少 if (s_wDisplaySecond 》 s_wRealSecond) wS0S2 = s_wDisplaySecond - s_wRealSecond; else //超了一圈(12小时) wS0S2 = ((uint16)12 * 3600) - (s_wRealSecond - s_wDisplaySecond); //如果算下来“快”了9小时以内,认为其确实“快”了,否则认为实际是“慢”了3小时不到。 //之所以不以6小时分界,是因为步进马达可以无限放慢,有限地加快。 if (wS0S2 《 2) //偏快不多,正常运行 wS0S2 = MOTOR_PERIOD - MOTOR_PULSE_DUTY; //正常运行 else if (wS0S2 《 ((uint16)9 * 3600)) //偏快,降速运行 wS0S2 = MOTOR_PERIOD_SLOW - MOTOR_PULSE_DUTY; else //偏慢,加速运行 wS0S2 = MOTOR_PERIOD_FAST - MOTOR_PULSE_DUTY; //步进电机驱动信号4个stage一个循环,走2步 switch(ucStage & 0x03) { case 0: MCU_IO_CLR(MOTOR_DRVN_PORT, MOTOR_DRVN_PIN); TACCR1 += wS0S2; break; case 1: MCU_IO_SET(MOTOR_DRVP_PORT, MOTOR_DRVP_PIN); TACCR1 += MOTOR_PULSE_DUTY; break; case 2: MCU_IO_SET(MOTOR_DRVN_PORT, MOTOR_DRVN_PIN); TACCR1 += wS0S2; break; case 3: MCU_IO_CLR(MOTOR_DRVP_PORT, MOTOR_DRVP_PIN); TACCR1 += MOTOR_PULSE_DUTY; break; } } __low_power_mode_off_on_exit(); }
使用方法
由于系统无法读取钟面显示的时间,因此在系统上电启动时,必须先把钟面拨到00:00:00的默认位置。上电时,MCU默认为 钟面显示时间和系统实际时间为00:00:00.系统在00:00:02启动BPC对时,对时成功后,“实际时间”就准确了,这时,从UART输出的守时信号也是准确的了。 但钟面时间需要一段时间后才能逐步同实际时间一致。以后,系统会在每天的00:00:02和12:00:02各启动BPC对时一次,如果对时成功或20分钟内不能对时 则自动关闭BPC模块以节约电池。对时成功,照明等会点亮2秒。
在每天的17:00-21:00, 05:00-9:00两个时段内是BPC发射台是关闭的,在这两个时段内开机是无法对时的。
系统提供了一个按钮,短按按钮可以点灯5秒,以便夜间照明。长按2秒以上可以立即打开BPC对时,对时成功或5分钟内不成功 则自动关闭BPC模块。这些业务逻辑都在主程序中实现。
实物图

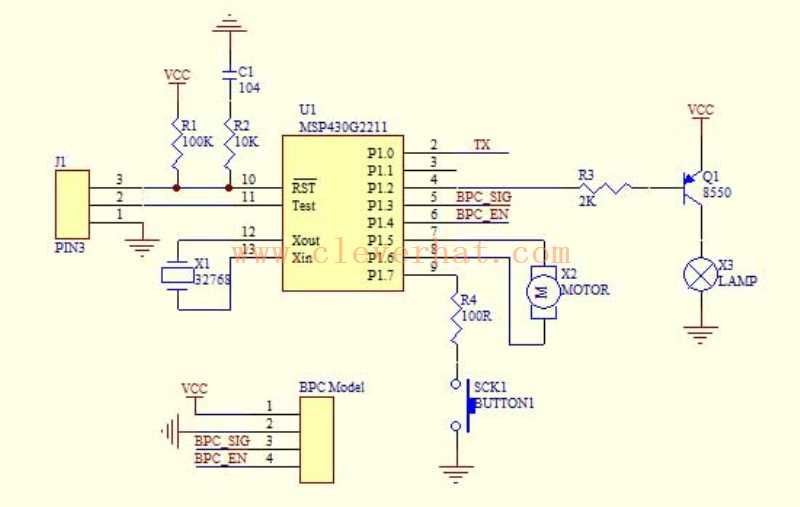
原理图
JI为下载接口。MSP430G2211晶振匹配电容内置,可配置,所以不需要外接电容
责任编辑:wv
-
电波钟
+关注
关注
0文章
4浏览量
7177
发布评论请先 登录
相关推荐
解码时间的隐形指挥棒:NTP校时服务器



NTP服务器知识课堂 网络时间同步系统的校时方式

网络时间同步系统的校时方式

同步时钟:北斗/GPS卫星、电信基站、NTP以太网校时方式的区别

网络时间同步服务器的校时方式,您了解多少?

赛思x中国民用航空飞行学院|智慧校园时钟系统解决方案,助力天府校区建设现代化智慧校园






 工商网监
工商网监
评论