 如何使用Arduino和Arduino控制步进电机
如何使用Arduino和Arduino控制步进电机
概述
步进电机介于常规直流电机和伺服电机之间。它们的优点是可以精确定位,一次可以向前或向后移动一个“步”,但是它们也可以连续旋转。
在本课程中,您将学习如何使用Arduino和Arduino控制步进电机。与第15课中的直流电动机一起使用的相同的L293D电动机控制芯片。
零件
要构建本课中描述的项目,您将需要以下零件。
零件 数量
5V步进电机 1
L293D IC
1
半尺寸面包板
1
Arduino Uno R3
1
跳线束
1
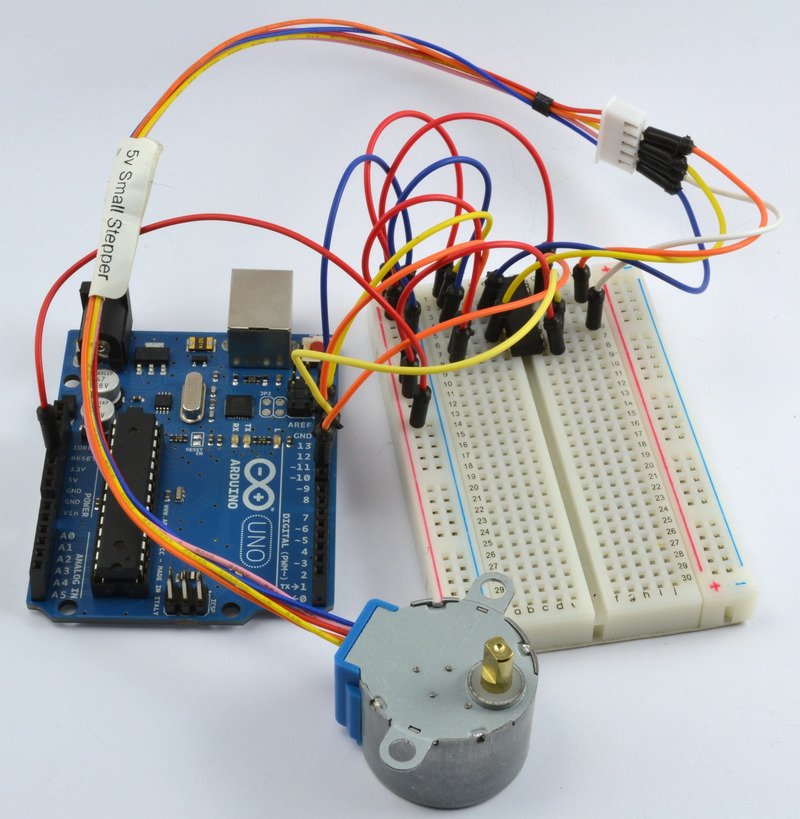
电路板布局
步进电机有五根引线,这次我们将使用L293D的两半。这意味着面包板上有很多连接。
电动机的末端有一个5路插座。
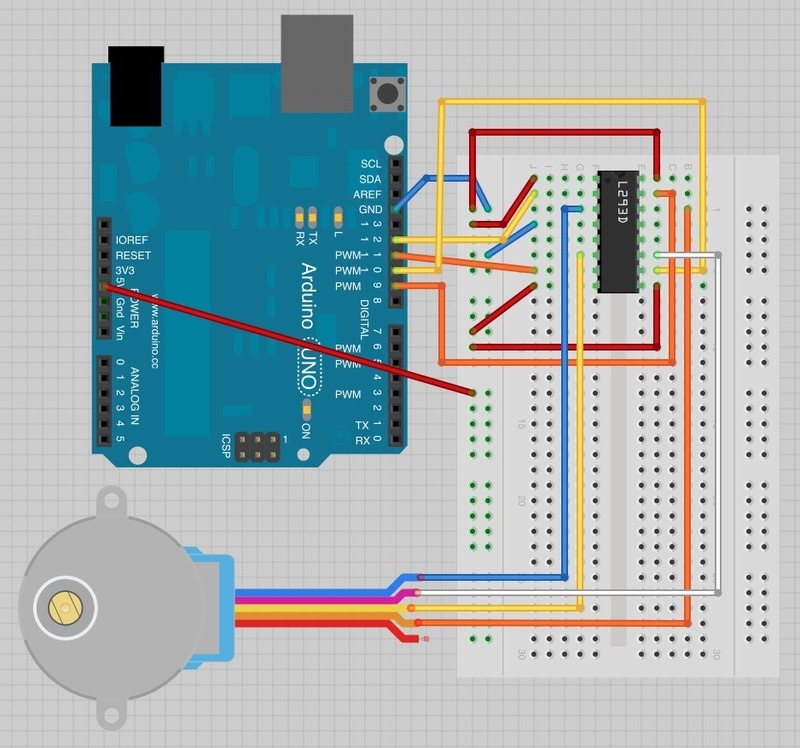
i》
请注意,步进电机的红色导线未连接任何东西。
Arduino代码
下面的草图使用串行监视器,在草图安装并运行后,打开串行监视器并输入许多“步骤”。尝试将其设置为大约500,这将导致电动机旋转大约360度。输入-500,它将向反方向返回。
Stepper库是包含在较新的Arduino IDE发行版中-您可能需要升级。
下载:文件
复制代码
/*
Adafruit Arduino - Lesson 16. Stepper
*/
#include
int in1Pin = 12;
int in2Pin = 11;
int in3Pin = 10;
int in4Pin = 9;
Stepper motor(512, in1Pin, in2Pin, in3Pin, in4Pin);
void setup()
{
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(in3Pin, OUTPUT);
pinMode(in4Pin, OUTPUT);
// this line is for Leonardo‘s, it delays the serial interface
// until the terminal window is opened
while (!Serial);
Serial.begin(9600);
motor.setSpeed(20);
}
void loop()
{
if (Serial.available())
{
int steps = Serial.parseInt();
motor.step(steps);
}
} /*
Adafruit Arduino - Lesson 16. Stepper
*/
#include
int in1Pin = 12;
int in2Pin = 11;
int in3Pin = 10;
int in4Pin = 9;
Stepper motor(512, in1Pin, in2Pin, in3Pin, in4Pin);
void setup()
{
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(in3Pin, OUTPUT);
pinMode(in4Pin, OUTPUT);
// this line is for Leonardo’s, it delays the serial interface
// until the terminal window is opened
while (!Serial);
Serial.begin(9600);
motor.setSpeed(20);
}
void loop()
{
if (Serial.available())
{
int steps = Serial.parseInt();
motor.step(steps);
}
}
正如您所期望的,有一个支持步进电机的Arduino库。
在包括“ Stepper”库之后,定义了四个控制引脚“ in1”至“ in4”。
告诉ArduinoStepper哪些引脚连接到电机控制器的库,使用以下命令:
下载:文件
复制代码
Stepper motor(768, in1Pin, in2Pin, in3Pin, in4Pin); Stepper motor(768, in1Pin, in2Pin, in3Pin, in4Pin);
第一个参数是电机完成一次公转所需要的“步数”。电机可以一次移动一步,以进行非常精确的定位。
然后开始串行通信,以便Arduino准备从串行监视器接收命令。
最后, followingcommand设置我们希望步进电动机移动的速度,随后我们告诉它旋转多少步。
下载:文件
复制代码
motor.setSpeed(10); motor.setSpeed(10);
“循环”功能非常简单。它等待来自SerialMonitor的命令输入,然后使用‘parseInt’将发送的数字文本转换为int。然后,它指示电动机旋转该步数。
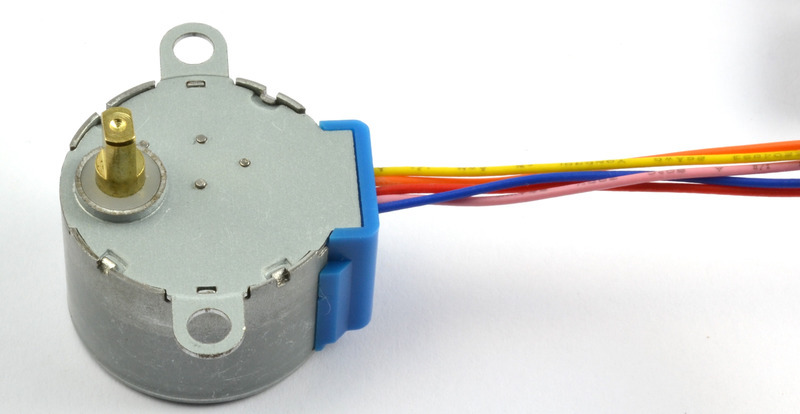
步进电机
步进电机使用带齿的轮和电磁体一次将轮微调为“步进”。
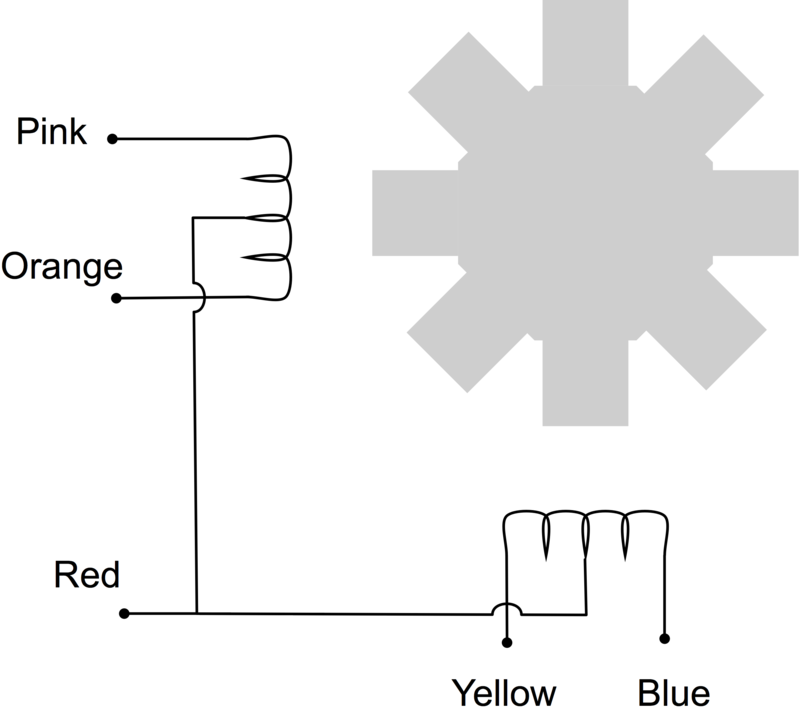
通过以正确的顺序给线圈通电,电动机被驱赶。步进电机在360度旋转中的步数实际上就是齿轮上的齿数。
我们正在使用的电机具有48步,但是该电机还集成了一个减速齿轮箱:1: 16表示它需要16 x 48 = 768步。
在本课程中,我们不使用公共Redconnection。仅在使用不同类型的驱动电路时才提供此连接,该驱动电路不允许每个线圈中的电流反向。每个线圈都有一个中心连接,这意味着您可以为线圈的左侧或右侧通电,并获得反向电流的效果,而无需使用可以反向电流的电路。
如果使用L293D具有非常好的反向电流,则不需要这种公共连接,我们可以向每个线圈的整个方向提供电流。
其他要做的事情
尝试更改设置步进电动机速度的命令:
下载:文件
复制代码
motor.setSpeed(20); motor.setSpeed(20);
到较低的值(例如5)上传草图,并注意步进器旋转得更慢。
现在尝试通过将速度提高到20以上来找到步进器的最大速度。在确定一点之后,您会发现电机完全不动。这是因为它跟不上要求它步进的脉冲流。
尝试断开步进器的橙色和粉红色引线。它仍然应该转动,但是您会注意到它较弱,因为它没有两个线圈都在推动电机运转。
责任编辑:wv
-
步进电机
+关注
关注
152文章
3133浏览量
148387 -
Arduino
+关注
关注
188文章
6481浏览量
188983
发布评论请先 登录
相关推荐
步进电机的控制实现方法

如何使用Arduino实现CAN总线通信呢
Made with KiCad(十一):Sangaboard步进电机控制板







 工商网监
工商网监
评论