 传统式和非传统式陀螺仪的发展趋势
传统式和非传统式陀螺仪的发展趋势

摘要:梳理了陀螺经纬仪的发展历史,总结了各个阶段陀螺仪的基本特点。结合国外机械式陀螺仪的发展现状,通过分析4种具有代表性的陀螺仪的优缺点,探讨了传统式和非传统式陀螺仪的发展趋势,并指出陀螺仪未来必将朝着便携化、高精度、高可靠性和低成本的方向发展。
0引言
随着陀螺仪的快速发展,完善解决了导弹武器系统的定向问题。传统的机械式陀螺仪具有可靠性高、技术成熟、应用广泛等特点;新型陀螺仪,如激光陀螺仪、冷原子陀螺仪等,具有结构精简、技术先进、精度较高等优势。这两种陀螺仪都在不同的领域里发挥着重要的作用。
1陀螺经纬仪的发展历程
陀螺经纬仪的概念最早是由法国物理学家傅科(Foucault L)于1852年提出:如果将高速旋转的陀螺放在一个万向支架上,就可以利用陀螺在高速旋转时保持稳定的特性来辨认方向,并且这种定向不依赖外部信息完全自主。进入20世纪以后,电气化实现了大的变革。1920年,德国工程师舒勒研制了第1台真正意义上的陀螺经纬仪并用于矿井定向;到了20世纪中叶,德、苏、英、美等西方发达国家逐渐认识到了精确定向的重要性,陀螺经纬仪的研发进入了新的阶段,各项指标不断更新。
陀螺仪的发展大致经历了以下4个阶段:
1)第1阶段:液浮式陀螺经纬仪。液浮式陀螺经纬仪是将陀螺灵敏部放在液体环境中漂浮起来,感知地球自转,从而实现寻北。这种方式对灵敏部重心的稳定性要求极高,灵敏部内的线圈不对称,供电电压不稳定,都会对重心造成扰动,导致仪器测量失败。
2)第2阶段:悬挂摆式陀螺经纬仪。抛弃原来的液浮设计,利用悬带将陀螺转子悬挂起来,使其感知地球自转,并完成寻北。这一设计简化了仪器内部结构,增强了仪器的抗干扰性,也大幅提高了寻北精度。在这一阶段,陀螺仪与经纬仪开始结合,形成上架式陀螺经纬仪,仪器的集成度大大提高。
3)第3阶段:全自动陀螺经纬仪。原始的摆式陀螺经纬仪灵敏部需要手动上锁、下放和限幅,这些都需要很长时间,尤其是手动限幅过程,不仅费时,还对操作人员的熟练程度有很高的要求。全自动陀螺经纬仪利用光电转换元件敏感陀螺灵敏部的位置,通过伺服电机进行灵敏部的上锁、下放和限幅,大幅度缩短了仪器测量时间。
4)第4阶段:新型陀螺经纬仪。上述3种都是传统陀螺经纬仪,也称为机械式陀螺经纬仪,其共同点是都具有机械陀螺结构,并且利用陀螺的高速旋转来寻找真北。随着科技的发展,已经出现新型陀螺经纬仪,即激光陀螺、光纤陀螺、冷原子干涉陀螺等。但是,目前由于技术限制,还存在着很多问题,未大量投入生产使用。
2国外先进机械式陀螺经纬仪概况
自1947年以来,德国、苏联、英国、匈牙利、瑞士、美国、日本等国家先后开展了机械式陀螺仪的研究。在这段历史中,摆式陀螺仪的发展大体经历了船舶陀螺罗经、液体漂浮式陀螺经纬仪、下架悬挂式陀螺经纬仪和上架式陀螺经纬仪4个阶段,目前正向小型化、自动化、智能化方向发展。有关国外机械摆式陀螺仪基本情况见表1。
表1 国外机械摆式陀螺仪基本情况
国外的相关研究起步较早,积累的经验比较丰富,已经形成了系列技术成熟的工业产品。目前国外最先进的摆式陀螺寻北技术主要集中在德国DMT公司研制的 GYROMAT系列陀螺经纬仪、美国利尔西格勒公司研制的MARCS陀螺经纬仪和乌克兰研制的GK-30、GK-3寻北仪等产品。
2.1 GYROMAT系列陀螺经纬仪
德国DMT公司研制的陀螺经纬仪有GYROMAT 2000、GYROMAT 3000和最新研制的GYROMAT 5000,在寻北精度、寻北时间和寻北范围3项重要指标方面都非常出色。该系列陀螺经纬仪的优点表现在以下4个方面:
1)充分结合寻北过程中各阶段的特点,优化各阶段设计,并具有3种寻北模式,能够满足不同情况下的测量;
2)采用加粗的大截面金属悬带,有利于计算悬带零位与平衡位置夹角,取消了导流丝结构,并将陀螺电机的供电电池进行内置,提高了悬带零位的稳定性;
3)降低了陀螺转子的转速,可以有效减小功率和摆动周期。采用该方法的相关文献试验证明了降低转速不仅可以缩短寻北时间,还可以减小仪器温度变化,从而减小误差;
4)可以实时检测仪器内外温差以及陀螺漂移。如果出现过大偏差,仪器便会报警,确保了结果的准确性。GYROMAT陀螺经纬仪外形图如图1所示。
图1 GYROMAT陀螺经纬仪外形图
尽管该型陀螺经纬仪有诸多优点,但也存在以下3个方面的不足:
1)仪器昂贵,周期长,费用高,尤其是内置电池组一般使用2~3年就需要更换,并只能返厂进行维修保障;
2)仪器的温度适应性不强,对温度的变化要求非常严格,工作时仪器内外温差不能超过5℃,温度梯度变化不能超过0.25℃/min,极大地限制了仪器的野外作业。
3)仪器工作时一旦出现问题就无法继续工作,连手动测量都无法进行。
2.2 MARCS陀螺经纬仪
美国利尔西格勒公司研制的MARCS(Master Azimuth Reference CalibrationStandard)陀螺经纬仪有以下3个突出特点:
1)对导流丝的设计进行了改动,不再采用U型结构,改用水平同心圆环结构,提高了电机运行的稳定性,并拥有较好的力学性能;
2)采用自动阻尼跟踪法,主要有位置阻尼阶段和伺服阻尼阶段,其工作原理是通过敏感灵敏部的扭力矩,计算出偏北角,而后控制仪器偏转相应角度,两个阶段依次工作,最终完成寻北过程。整个过程依靠精确的控制方法和良好的力矩器性能实现高精度寻北;
3)特殊的锁放机构设计可以让灵敏部较为平稳地下放。
MARCS陀螺经纬仪的不足之处体现在:由于其精细的控制方法造成了仪器结构复杂,而且仪器容易受到环境影响,不能应用于实战,只能在实验室的标准环境下进行测量,因此极大限制了使用范围。
2.3 乌克兰研制的GK-3、GK-30寻北仪
GK-3陀螺经纬仪属于基准级寻北仪,常温室内一次测量方位角的标准差为1″~3″(1σ),寻北时间37min~2h,其悬挂系统采用磁悬浮技术,并通过多位置测量力矩自动计算出仪器视准轴方向的方位角。GK-30寻北仪属于原苏联SS-20战略导弹的定向设备,寻北时间9min,可靠性高,车载工作抗震性能好,自动化程度较高,全环境下ー次测量方位角的标准差≤30″(1σ)。磁悬浮式悬挂系统是用电磁力使陀螺敏感元件悬浮于系统中,是一种无摩擦、无磨损的悬挂方式,它没有机械金属悬带。所以,在金属悬带式悬挂系统中,悬带结构特性变化和变形引起的零位变化在磁悬浮式悬挂系统中不存在。另外,它将测量敏感元件的周期摆动测北改为测量指北反馈力矩测北,使寻北时间大大缩短,从而实现了快速精确寻北。
2.4 日本的AGP-1全自动陀螺全站仪
图2为AGP-1全自动陀螺全站仪,由日本索佳公司生产,分为自动陀螺仪和全站仪两部分。AGP-1功能十分强大,只需在键盘上简单操作,屏幕上就会实时显示当前寻北数据,并且具有3种测量模式,寻北精度最高可达到±6″,寻北时间约10min。AGP-1内部电机为可编程直流电机,可以直接接受电子指令控制,加速功率1.0W,启动时间小于25s,制动时间小于30s,性能十分优越。采用整机一体化设计,操作方便快捷,自动化程度高。由于其强大的寻北效能,AGP-1在隧道、矿井、坑道等封闭场所得到广泛应用。
图2 AGP-1全自动陀螺全站仪
3陀螺经纬仪未来发展趋势
随着船舰航海、矿石开采、石油钻探、隧道挖掘以及军事领域对寻北定向的要求越来越高,陀螺经纬仪在不依赖外部信息、完全自主的定向仪器特性方面显得越来越重要。世界各国也都在加紧研发更先进的陀螺经纬仪。目前,相关领域的热点方向主要有:
1)继续研究传统机械式陀螺经纬仪,将先进的寻北算法、优良的硬件芯片、灵敏的传感技术、成熟的控制理论与机楲陀螺结合起来,不断提高仪器的寻北精度、缩短寻北时间、提高自动化水平。
2)研究新型陀螺,简化陀螺结构,向小型化便携化、平价化发展,如激光陀螺、光纤陀螺MEMS陀螺、冷原子干涉陀螺等。
3.1 传统机械式陀螺仪的发展趋势
传统机械式陀螺经纬仪的控制技术相对成熟,下一步的主要发展方向是提高结构一体化程度,增进寻北精度,具体体现在以下3个方面:
1)实现全方位寻北。
目前,国外先进的陀螺经纬仪对初始架设方位角都没有要求,基本上都可以实现全方位寻北。要减小陀螺仪的寻北时间,提高陀螺仪的环境适应性。在偏离真北方向角度过大时,也能通过掌握陀螺仪运动规律,解决灵敏部幅度摆动过大等问题,实现大偏角情况下的寻北。
2)实现仪器的集成化。
从国外先进的陀螺仪发展情况来看,一体化的发展将进一步减小陀螺仪的体积和质量,方便陀螺仪的运输。目前,还是有相当一部分陀螺仪是分体式的,需要主机再加一个电控箱,二者之间利用电缆连接,这不仅在通信时容易造成干扰,还使得架设运输很不方便。造成这一问题的主要原因在于硬件设计的集成度不够,大量的电路板难以与主机中的各种机械结构有机结合起来,导致不得不单独把电路部分隔离出来。要实现仪器的集成化,就需要对电路部分进行再设计,减小电路板的数量和尺寸。
3)提高仪器的寻北性能。
寻北精度和寻北时间是衡量陀螺经纬仪性能的核心指标。对仪器的性能要求是永无止境的,尤其是在军事领域中,测量准、测量快就能在战争中取得主导地位,甚至取得战争胜利。提高仪器的核心性能需要在核心技术上下功夫,包括改进寻北算法、提高机械加工精度、改进硬件合理设计等方面,这些构成了一个大的系统工程,需要更多科研人员的参与。
3.2 非传统陀螺仪的发展趋势
随着科学技术的发展,一大批采用新技术的陀螺仪涌现了出来,其共同点是摒弃了传统陀螺仪上的陀螺结构,使用了更先进的技术实现定向。对陀螺仪的发展而言,这是一次颠覆性的革命。根据目前新技术发展的成熟度来看,未来适用范围比较良好,同时控制精度比较高的几种陀螺仪主要有以下几种:
1)激光陀螺仪
激光陀螺仪没有旋转的转子结构,也不需要方向环框架、框架伺服机构、旋转轴承、导电环及力矩器和角度传感器等活动器件,因此存在的系统误差很小。激光陀螺仪启动时间非常短,接通电源后就能进入正常工作,只需50ms就能使零偏稳定性达到0.5°/h,这对武器系统而言十分宝贵,它的最小敏感角速率小于±0.001°/h。同时,固有的数字增量输出方便与计算机接口,适合连接系统使用。激光器陀螺仪需要突破的技术主要是谐振光路中折射系数的各向异性带来的零点漂移。图3为氦-氖环形激光陀螺仪。
图3 氦-氖环形激光陀螺仪
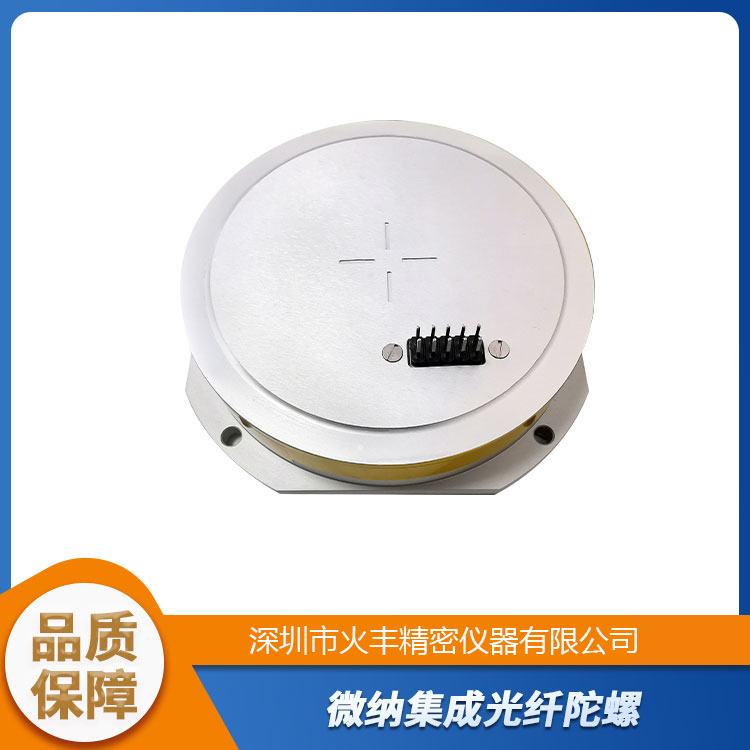
2)光纤陀螺
光纤陀螺也是基于Sagnac效应的一种新型陀螺经纬仪。除了具备激光陀螺仪的优点外,没有闭锁问题,也不用在石英块精密加工出光路,成本较激光陀螺低得多。目前,美国Honeywell公司是光纤陀螺行业的领跑者。该公司制作的光纤陀螺零偏稳定性可以达到0.0001°/h,满足绝大多数场合下的定向需求,如图4所示。从目前的发展来看,光纤陀螺最有可能率先实现对传统机械式陀螺的替代,不过还需要克服噪声和光纤双折射引起的漂移、偏振状态改变引起的比例因子不稳定等问题。
图4 光纤陀螺仪
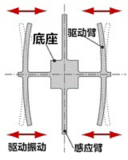
3)MEMS陀螺
MEMS(Micro Electro Mechanical System)陀螺,也称为微机电陀螺,是在21世纪初才发展起来的一种交叉学科领域的技术。它能够将机械构件、光学系统、驱动部件、电控系统集成为一个整体,不仅能够实现采集、处理与发送信息或指令的功能,还能够按照所获取的信息自主地或根据外部的指令采取行动。图5为MEMS陀螺仪。基于其体积小、质量轻的特点,通常将它用在对安装空间和质量要求比较苛刻的场合,如智能手机和数码相机的内部,未来将被广泛应用于民用领域。
图5 意法半导体MEMS陀螺仪
4)冷原子干涉陀螺仪
近几年,冷原子干涉陀螺仪才逐渐为人们所熟知,如图6所示。由于原子具有质量小、内部结构简单和能级不连续等特点,干涉现象能够呈现比光子更加丰富的内容,并且典型的原子德布罗意波比可见光波长短3万倍,所以原子干涉仪理论精度比光学干涉仪高得多。在惯性导航领域,理论上原子陀螺仪的灵敏度比光学陀螺仪至少高1101倍,而在冷原子干涉陀螺仪的惯性导航系统理论上,漂移不超过10m/h。
尽管冷原子干涉陀螺仪理论精度非常高,但在实际中存在2个亟待解决的问题:1)实际测量精度与理论值相差较大。因为旋转造成了2个原子波包在干涉时并不重合,造成的空间位置分离使探测过程中的干涉对比度急剧下降;2)冷原子的制备速率还远达不到系统要求,主要是因为温度、辐射、器件结构等对冷原子存在较大影响,进而导致与陀螺仪相关的精度、测量时间都受到影响。目前来看,尽管冷原子干涉下的陀螺仪在精度理论上能达到很高,但是冷原子提取核心技术在未取得长足发展之前,难以实现量产。
图6 斯坦福大学冷原子陀螺仪
4结束语
无论在民用领域,还是军事领域,陀螺经纬仪占据的地位愈发重要。它的发展极大地提高了系统的定向精度,缩短了定向时间。尤其在军事应用方面,符合现代战争快速性、精确性、机动性打击等特点。从发展趋势来看,由于民用和军事领域的需求不同,陀螺仪也会相应开发出不同的精度和成本系列。不过随着新技术的发展和改进,传统的机械式陀螺仪必将被逐步取代,陀螺仪将朝着一体化高精度、高可靠性、低成本方向发展。
-
陀螺仪
+关注
关注
44文章
900浏览量
102190 -
陀螺经纬仪
+关注
关注
0文章
3浏览量
6269
原文标题:陀螺经纬仪发展综述
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
稳如磐石,控于毫厘:MEMS三轴陀螺仪稳控新高度

MEMS陀螺仪如何成为动态世界的“定盘星”?

STM32H5开发陀螺仪LSM6DSV16X(1)----轮询获取陀螺仪数据

光纤陀螺仪与惯性导航系统在无人车驾驶中的应用

什么是光纤陀螺仪?陀螺仪有哪些作用?
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

MEMS陀螺仪如何实现高精度寻北?
MEMS陀螺仪有哪些分类?
MEMS陀螺仪正在取代光纤陀螺仪?
低成本MEMS陀螺仪如何重塑工业级运动感知精度?
振动陀螺仪传感器的工作原理
陀螺仪在钻井或测井中有何用途?

物联网未来发展趋势如何?
MEMS陀螺仪的寻北原理是什么?精度如何?

“MEMS陀螺仪”小到极致,稳如磐石!




评论