 水下作业小能手
水下作业小能手
水下滑翔机水下导航定位精度的提高对于滑翔机完成海洋环境观测、资源探测、海洋目标识别与定位等任务至关重要。现有的水下滑翔机的导航技术多以航位推算搭配全球定位系统(GPS)为主。随着导航技术的进步,惯性导航、声学导航、海洋地球物理导航和组合导航等技术将更多地应用于水下滑翔机。基于此,文中简要介绍了水下导航技术原理、分类以及常用算法,综述了水下滑翔机导航相关技术研究与应用的国内外现状,探讨了水下滑翔机冰下导航的技术难点和发展趋势。文中的工作可为水下滑翔机导航技术的深入研究与试验应用提供依据。
水下滑翔机依靠调节浮力实现升沉,借助机翼产生水动力进行滑翔运动,具有低噪声、长航程、大潜深等特点,可对海洋信息进行长时序、大范围的观测与探测[1]。作为认识海洋、经略海洋、保护海洋的一种重要工具,水下滑翔机在海洋科学探索、海洋资源开发以及海洋国防安全方面具有广泛的应用前景。
为了完成观测与探测任务,水下滑翔机需沿预设路径航行,为此需要进行水下导航。导航定位技术对保障水下滑翔机的工作效能和航行安全至关重要[2],此外,导航定位精度也是水下滑翔机重要的技术指标[3-5]。水下滑翔机的导航包括水面和水下导航,其中,水下导航是一种将无人水下航行器由起始点引导到目标点的技术,基本参数为其位置、速度和航向[6]。
目前较为常见的水下导航方法有:航位推算法、惯性导航、声学导航、海洋地球物理导航和组合导航技术[7-8]。航位推算法凭借小能耗和低成本的优点,在水下滑翔机中被广泛使用于水下滑翔机。;惯性导航系统(inertial navigation system,INS)不依赖于外部信息源,是自主导航中的一种,常作为组合导航中的主导航系统。;声学导航可分为长基线(long baseline,LBL)、短基线(short baseline,SBL)和超短基线(ultra short baseline,USBL)3种。;海洋地球物理导航利用地球本身物理特征进行导航,主要分为地磁辅助导航、地形辅助导航和重力辅助导航,优点是具有自主性强、隐蔽性好、不受地域和时间限制等优点。;组合导航技术是指将多种导航方式结合在一起,它是水下导航未来的重要发展方向。以卡尔曼滤波为代表,基于状态空间分析的以卡尔曼滤波为代表的最优估计法是水下组合导航的关键技术。
为明晰水下滑翔机导航技术发展现状,文中从以下几方面对其进行梳理:
1)简要阐述导航技术原理及常用的导航算法;
2)介绍水下导航相关的技术研究与应用情况的国内外现状;
3)分析水下滑翔机在冰下导航的技术难点和发展情况。
1水下导航技术原理
1.1航位推算
1.2惯性导航
1.3声学导航
1.4海洋地球物理导航
1.5组合导航
2水下滑翔机导航技术发展现状
相较于其他类型的无人水下航行器,水下滑翔机的体积更小,质量更轻,但相应的负载能力有限。水下滑翔机需要在水下长期工作,同时又要保证导航精度的前提下,对其所携带导航设备的体积、质量和能耗提出了更严格的要求。
2.1水下航位推算技术
简单的航位推算形式只需电子罗盘和深度传感器的组合即可实现水下导航。例如,Scripps海洋研究所(Scripps institution of oceanography)研制的Spray水下滑翔机[24]在水面获得定位信息后,通过搭载的TCM2电子罗盘以及211-38型深度计,就能够推算出向目标点位置运动的目标航向、姿态角度等航行参数。
华盛顿大学的Seaglider水下滑翔机[25]根据水下的推算位置在水面的投影与期望位置之间的差值,利用KF进行定位估计。如果海流速度与Seaglider的水平滑翔速度相当,则根据KF算法,用深度平均流来建立海流模型,基于海流模型参数推算向目标航点前进的最优航向与速度。Seaglider水下滑翔机浮出水面时利用Garmin 25 HVS型GPS模块进行导航误差修正。如果海流速度超过航速,Seaglider会选择使目标距离增加最小的方向作为目标航向。
计入从上一个出水位置到当前出水位置之间沿滑翔机轨迹得出的平均流速估计值,融合到航位推算中,对提高导航精度有一定效果[26]。但这种估计方法没有考虑流场的时空变化,与实际流速存在较大偏差,导航精度改善有限。Webb Research Corp研制的Slocum水下滑翔机[27]将航位推算与多普勒测速结合,利用DVL实测海流数据,提高航位推算精度。
采用数据同化调整模型[28],融合卫星、船只、浮标和滑翔机的实时或远程观测数据,可进一步提高海流预测模型的准确性。Szwaykowska等[29]研究了基于海洋模型的真实环境并模拟水下航行器位置误差增长的界限,这种误差分析方法可用于提高海洋模型的精度和导航算法的性能。Hart等[30]开发了一种基于A*算法的最优路径规划算法。该算法结合区域海洋模型,通过对滑翔机运动轨迹的预测,生成仿真滑翔机运动轨迹模型。由于没有对算法的估计流速与滑翔机的观测流速进行比较,无法验证模型的正确性[31]。Chang等[32]提出一种由海洋模型预测辅助的Slocum实时导航算法,并于2012~2013年底在美国南卡罗莱纳附近海域进行海试,试验结果验证了海流预测模型可提高滑翔机的导航性能[33]。Szwaykowska等[29]聚焦于较小海域的水下滑翔机工作情况,根据多架滑翔机的测量数据作为反馈,对模型进行实时调整,从而提高水下滑翔机在海洋中的导航性能。这种方法相比基于航位推算和水下流速估计的导航方法拥有更高的导航性能,当存在明显时空变化的流场时,具有更好的可靠性。
2.2惯性导航技术
INS可为水下滑翔机提供较精确的定位信息。现阶段,INS在质量、精度和能耗等多方面存在应用瓶颈,导致这种方法未在水下滑翔机中得到广泛应用,Huang等[34-35]展示了微型机电系统(micro electro mechanical system,MEMS)在水下滑翔机中的试验性应用。Jenkins等[36]提出一种应用于水下滑翔机的紧凑型惯导系统——iXSEA U-phins,其重约2.14 kg,体积2 100 cm3,功耗为3 W(见图)。
图iXSEA U-phins惯性导航系统
惯性测量元件的精度直接决定了SINS的精度水平。当前SINS常用的陀螺仪类型有激光陀螺仪、光纤陀螺仪及微机电陀螺仪等。国外的陀螺仪已进入光学和微机电时代,精度不断提高,环形激光陀螺、干涉型光纤陀螺和MEMS陀螺等固态陀螺仪逐渐成熟。受制造工艺和专用集成电路水平的制约,目前国产陀螺仪的精度不高,总体上和以美国为代表的世界先进水平有一定的差距。近几十年,国内的一些高校和科研单位基于不同种类的陀螺仪自主研制了多种SINS,如激光陀螺SINS、光纤陀螺SINS和MEMS陀螺SINS等,已经被陆续应用于陆海空等领域。就全球发展现状而言,现有惯性测量元件不足以满足当前各种不同导航任务的指标要求,未来的主要目标是提高精确性、连续性和可靠性,降低器件的成本及功耗等。
惯性传感器元件的定常误差模型难以建立,提高导航精度十分困难。针对这个问题,Huang等[34-35]根据不同的误差模型设计合适的滤波器,将多模型方法与EKF相结合,给出状态的最优估计。同时利用具有高精度预测优势的融和Adams的多模型扩展卡尔曼滤波算法(multi-model EKF fusing Adams explicit formula algorithm,MEKFA),使姿态估计精度得到较大的提高。理论分析证明了该算法的收敛性和稳定性,并通过“海翔”号水下滑翔机湖泊试验进行了验证。结果表明,MEKFA方法与单EKF和乘性扩展卡尔曼滤波(multiplicative EKF,MEKF)相比,姿态估计性能有显著提高。
Kim等[37]结合平均海流速度模型,实现了INS对海流速度的测量。经过计算,受海流影响的加速度增量是INS中加速度计测量精度的1/10,加速度计无法直接感觉到海流的影响,这些微弱的海流效应将完全被传感器噪声和外部干扰所阻断。然而,海流对滑翔路径的影响是在若干小时的滑翔中累积起来的。通过将滑翔机内置的INS输出数据与平均海流速度模型的先验信息结合,校正海流加速度测量,完成加速度计偏差的误差修正就能够获得水下滑翔机位置估计。对于没有海流信息的情况,仍然可以根据每次滑翔结束后测量到的位置误差估计海流数据,再递归反馈到平均海流模型中,从而提高定位精度。
姿态位置信息的测量精度还取决于数据融合算法,传统的捷联式惯性导航的姿态算法在复杂动态环境下,常常不能满足目前的精度要求,需要寻求更高精度的算法。位姿估计的算法中最常用的是KF算法,其广泛适用于线性状态空间模型,但该方法要求系统方程线性且系统模型精确,并不适用于非线性系统。有学者提出用统计算法来估计非线性状态空间模型,Durbin等[38]基于推算近似线性模型提出了迭代结构,这些线性模型的似然估计能匹配潜在非线性模型的对数似然函数,在线性估计模型的基础上提出重要性抽样方案,但此方法需要计算Jacobian矩阵,计算量较大,实际应用中具有一定的局限性。文献[39]~[42]中提出的鲁棒滤波器和KF相比不需要噪声的统计假设,当系统中存在不确定模型时,该滤波器因具有较强的鲁棒性而得到广泛应用。即使出现模型不确定,H2滤波器也能确保在H2范数中噪声信号与滤波误差之间存在边界,但要求噪声是高斯白噪声信号。滤波器通过优化对所研究对象的某些闭环性能使范数达到最优的滤波效果。为保证滤波器不仅有收敛的估计误差而且有较满意的动态性能,Cao等[43]提出了混合滤波器。
2.3声学导航技术
声学导航主要是利用固定或移动声学信标通过水声通信来完成水下导航。Techy[44]和Van Uffelen等[45]中提出一种应用于Seaglider水下滑翔机的LBL声学导航系统。该系统由3个位于水面并配备有GPS导航模块的移动声学信标作为参考,通过测量声波往返行程的时间,再利用EKF算法将水下滑翔机的运动状态融入到估计算法中,得出简单的几何定位估计值,通过仿真和试验验证了此声学系统在具有多径效应和强海流的浅海环境下,能够有效提供高精度的定位估计。2010~2011年初,Van Uffelen等[46-47]在菲律宾海域部署了4架Seaglider水下滑翔机,利用水下滑翔机接收到声波时刻与预测值之间的传输时间偏移量来估计距离的误差值,从而提高滑翔机在水下收集数据时的定位估计,验证了滑翔机作为传感器搭载平台的实用性。整个工作过程记录了滑翔机超过2 000次的水声数据传输,距离系泊声源最远达到700 km。与以上方案不同,Sun等[48]提出以声学信标为环境特征,根据海底信标到滑翔机的距离来估计滑翔机的位置,实现水下滑翔机在三维空间的导航定位的导航方法。基于EKF-SLAM(simultaneous localization and mappi-ng)算法,在信标位置未知情况下,能够同步估计滑翔机和信标的位置。这种算法的优势在于将滑翔机的速度估计纳入导航定位系统中,进一步降低了导航定位误差。
Woithe等[49]探讨了利用DVL来改善Slocum电能滑翔机航位推算算法中位置估计方法的可行性,提出通过安装DVL的辅助航位推算导航算法,并在新泽西海岸进行为期12天的滑翔机部署,初步显示了良好的试验效果。
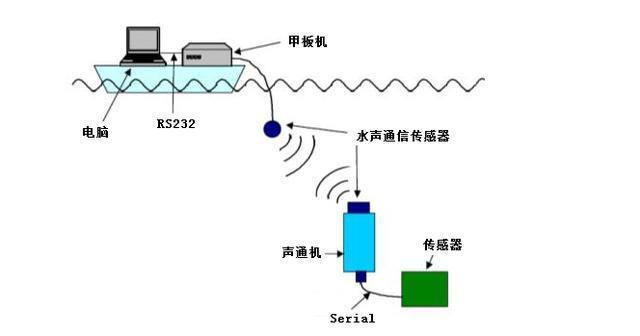
硬件方面,低功耗声学调制解调器是声学导航的核心器件。美国Teledyne Benthos公司为美海军Seaweb海底网络开发了一种名为Telesonar的声学调制解调器。Teledyne Webb提供的Sloc-um滑翔机和Teledyne Benthos提供的调制解调器组合形成的导航定位和数据传输网络见下图。
水下滑翔机/声学调制解调器数据传输示意图
2.4组合导航技术
2.4.1 GPS/SINS/DVL组合导航
SINS结合DVL是目前水下组合导航中比较常用的方法,并在多种水下航行器中得到广泛应用[51-53]。季龙[54]和黄海洋[55]先后对在水下滑翔机上搭建低成本、高精度的GPS/SINS组合导航系统进行了探索。在水面上时,使用GPS提供整机系统需要的位置坐标信息。在水下运动时,由电子罗盘或SINS和深度传感器相结合获取滑翔机的姿态信息,再通过卡尔曼滤波进行数据融合实现水下的位置解算。李辉[56]提出了一种水下滑翔机的水面/水下导航定位算法:在水面上通过GPS获取位置,在水下利用姿态航向参考系统提供信息,再利用EKF方法进行导航信息融合,最后利用MATLAB软件进行算法仿真,结果符合预期。对于水下滑翔机编队的协同导航算法,Paley[57]和Tang等[58]提出了自适应EKF,通过声学广播的方式,解决了水下滑翔机的编队协作组网导航定位问题。Huang等[59]基于惯性导航和航位推算的组合导航,提出一种分裂基快速傅里叶变换和UKF的混合算法。分裂基快速傅里叶变换是将radix-2和radix-4快速傅里叶变换的优点结合起来的一种方法[60],计算量较小,拥有较大的渐进复杂度。试验结果表明,该算法在估计精度和计算成本方面具有较好的优势。周吉雄[61]将UKF与联邦卡尔曼滤波(federated Kalman filtering,FKF)技术集合起来,通过仿真验证了这种基于局部反馈校正的UKF在组合导航系统中具有较高的精度和鲁棒性。吕志刚[62]提出一种SINS/GPS和DVL组合导航的方法,为自主式水下航行器(autonomous underwater vehicle,AUV)平台提供高精度的连续导航信息,并对此组合导航系统的标定方法和误差分析进行了系统性的研究。针对SINS/DVL组合导航问题,Xu等[63]以导航需求为导向,设计基于改进Sage-Husa自适应卡尔曼滤波算法的导航系统,仿真结果表明,该系统具有较高的容错性。
2.4.2海洋地球物理辅助惯性导航技术
1)地磁辅助导航
20世纪70年代,美国就已经完成了全球磁力矢量分布图的测绘,并研制出了适用于AUV平台的地磁定位系统。美国西屋电器公司提出了利用己知静止磁异常对水下航行器进行导航的方法[64];美国雷神公司提出了利用磁场进行水下导航定位的方法,并进行了试验验证[65]。2009年,Kato[66]提出了基于地磁图和等深线图的AUV导航定位算法,并采用相关海域的地磁场数据和水深数据进行了仿真试验。NASA Goddard空间中心对水下地磁导航进行了研究,并进行了大量的试验[67]。
在国内,余乐[68]以提高地磁匹配导航系统航迹规划效率和精度为目的,对航迹规划算法和地磁适配区选择原则进行了理论研究和仿真验证。Lin[69]对水下地磁导航进行了研究,在渤海海域进行了地磁测量与水下地磁辅助导航试验,取得了400 m左右的精度。国防科学技术大学科研人员[70-72]成功研制出惯性/地磁匹配组合导航系统样机,并分别于2008年、2009年、2011年进行了岸基车载试验、水面船试验和水下试验,验证了地磁/惯性组合导航系统的可行性。刘明雍等[73]提出受地磁异常影响的水下航行器导航方法,将最近点迭代算法运用到水下地磁匹配导航中,通过多次迭代匹配来减小惯性导航的累积误差。
2)地形辅助导航
在全球卫星导航出现之前,洲际巡航导弹的远程导航系统是利用高度计数据与预先存储地图的地面高程进行比较,从而实现精确长期的定位估计。定位精度取决于地形图的分辨率和测量高程的精度。在建立GPS之后,这个系统显得多余,但其在GPS定位失效时仍能发挥作用。由此,利用地形信息进行水下导航也是可行的,但由于水深图分辨率较低,限制了其在水下航行器中的使用。
在国外,Stuntz等[74]研究了在沿海地区精确定位滑翔机轨迹所需的最小数据集,分析了地形跟踪算法的定位性能,首先对压力传感器和高度计的采集数据进行平滑处理以消除噪声,然后将其与局部测深值进行比较,从而生成位置修正值。在加州沿海进行的Slocum滑翔机的试验结果表明,地形辅助惯性导航方法比单独使用惯性导航更加精确。
通过其他的地球物理参数,如采用地球磁场和地球重力场来增强地形辅助算法,以提高其鲁棒性的研究也被提出,但是这些试验的效果还未得到充分证明[75]。
3冰下导航技术发展方向
冰下任务提供了非常有价值的科学信息。自20世纪70年代,Francois和Nodland在北冰洋边缘的波弗特海部署无人水下航行器时起,许多AUV都陆续开展了冰下观测。在冰层覆盖地区持续观测对气候变化研究和极地勘探工作尤为重要。在冰下,卫星导航系统失效,水下滑翔机的导航与定位尤其困难,惯性导航失去定时校准条件,在现有水下导航方法中,只有声学导航和地球物理导航方法能够在冰下为滑翔机提供有限的定位估计。
3.1冰下声学导航
利用声学设备进行导航的水下无人航行器,多依赖于固定的声源进行机载导航或在船上和陆地上来进行位置估计。Rossby等[76]为Seaglider开发了适用于冰下环境的声学导航系统,并于2006~2014年在戴维斯海峡部署了14架次滑翔机,对六自由度EKF后处理导航结果进行了验证。试验中的定位信息是由系泊在固定位置的RAFOS浮标[76]搭载的声学导航源提供的。美国海军研究办公室(office of naval research,ONR)边缘冰区(marginal ice zone,MIZ)项目开发的实时声学导航系统在南极洲对Slocum水下滑翔机的冰下声学导航定位能力进行了验证[77]。
最常用的冰下声学导航策略是LBL系统导航和USBL导航相结合的导航策略[78-79]。另外,还有一些LBL的新应用[80]以及基于视觉的用于超短距离的归航算法。Hugin[81]和Theseus[82]等水下机器人使用单信标导航来扩展它们的LBL系统。此外,Gavia水下航行器[83]创新地向上安装DVL来测量航行器相对于冰层的速度,以实现水下导航。
由于导航源不能穿越冰层预先部署在海底,只能部署在冰面上,所以,当探测区域的冰层漂移时,导航源不能对滑翔机提供精确实时的定位信息。声学导航源需同时传输它们所在的位置。随时间传输导航源位置信息的概念并不新鲜,GPS信号和低速率遥测数据已经被用于小型水下移动导航网络[84-86]。华盛顿大学在北极的试验中首次使用这种方法搭建了完整的导航系统[87],但由于导航源和水下滑翔机之间的通信过程产生的时钟漂移将导致距离测量存在一定误差。
3.2冰下地形辅助导航
美国伍兹霍尔海洋研究所[88]对水下滑翔机在冰下的地形辅助导航方法进行了系统的研究,评估了可用于水下滑翔机在经历季节性海冰海洋中全年使用的可行性。该试验基于Slocum 200 m水下滑翔机,结合深度和海流估计的水深模型[89],使用单波束高度计和航位推算方法进行导航信息更新。试验结果十分乐观,但对算法使用地区具有局限性。
纽芬兰纪念大学的Claus等[90]通过一种离线试验方案,将在线定位估计方法分别与常规航位推算方法、包含GPS校正的航位推算方法以及离线地形辅助的定位估计方法进行比较,验证了水下滑翔机平台基于抖动自举粒子滤波器的地形辅助导航算法的准确性。这种方法被应用在冰下进行持久的导航定位测量。在纽芬兰赫里路德冰川峡湾,科研人员分别在2010年和2012年对水下滑翔机进行了距离为12 km和91 km的室外导航试验,试验结果表明,该算法能够在2次试验中分别保持33 m和50 m的误差。2014年6月10日~11日在加拿大纽芬兰省的康赛普申海湾,进行了水下滑翔机地形辅助导航的进一步测试,在由10 km和90 km直线段的2组离线试验中,该方法的误差分别为25 m和50 m,验证了冰下导航算法在浅海地区的有效性。但这些试验还存在以下问题:1)水下滑翔机的定位坐标系位于磁北,而地形辅助导航处理器坐标位于真北,导致相对于滑翔机坐标系存在一定的磁偏角误差;2)试验海域较浅,水下滑翔机仍能接收到GPS的定位信息,这些信息会将地形辅助算法的初始值重新复位,因此不能验证水下滑翔机在较深海域进行长时间持续导航情况下该算法的有效性。
5结束语
水下滑翔机作为探索海洋、执行水下任务的重要工具,在我国海洋资源勘探与开发方面具有重要作用。高精度、高可靠性的导航系统是水下滑翔机成功完成任务并安全返航的保证之一。文中对水下滑翔机平台常见导航系统的原理、分类与关键技术进行了说明,最后对水下滑翔机冰下导航发展情况进行了展望。
随着水下滑翔机工作范围向边远海域逐步扩大,水下导航技术也将面临更多未知的挑战。为搭建水下滑翔机海洋网络,实现海洋信息实时交互传递,未来,水下滑翔机导航技术将向着高精度、强鲁棒性、实时性及协同组网等方向发展。并以惯性导航技术为主,多种导航技术为辅,实现多种导航传感器,多种导航方式的组合导航,进一步提高水下导航技术的准确性、灵活性与可靠性,构建智能化的组合导航方式,不断提高水下滑翔机的海洋观测能力。
-
导航
+关注
关注
7文章
536浏览量
42597 -
无人机
+关注
关注
230文章
10542浏览量
182835 -
水下滑翔机
+关注
关注
0文章
5浏览量
1807
发布评论请先 登录
相关推荐
基于PC的水下作业控制系统的研究
基于模糊推理水下作业系统运动控制研究
南方电网水下机器人项目完成验收,可保障电网的安全可靠运行
水下机器人:百花齐放从科考利器到娱乐新品
遥控机器人在深水A油田卧式采油树作业中的应用资料说明

水下机器人将引来新发展 “新基建”将赋能水下机器人?
IT7600助力水下机器人作业
水下作业需求增大,加快我国水下机器人产业化、规模化进程
挪威或将开发用于恢复海底管道的水下3D打印技术
水下航行器水下高度、航向和姿态测量方案的介绍
ROV水下作业仿真平台:龚嘴水电站坝体检测和清理作业仿真
国产水声功率放大器ATA-L50在水下通信领域中的应用
水下测距传感器:泳池清洁机器人精准定位的必备智能感知“神器”






 工商网监
工商网监
评论