 电磁波微分差技术怎么对付船运难题
电磁波微分差技术怎么对付船运难题
本文针对雷达工作特点提出了一个新的航行方法,通过利用雷达反射回波得到测量物标高度,并结合测深仪深度数据,将测量物标精度进一步提高,为驾驶员安全航行狭水道等水域提供安全保障,同时解决了船舶过桥同步测高问题。在提高航行效能的同时,在船舶操纵与避碰方面也提供了便利。
目前,船舶驾驶主要依靠电子设备航行,雷达的使用,大大加强了海上瞭望的力度,不单单减轻了驾驶人员的劳力,同时也增加了船舶航行的安全。但是,目前船舶雷达的测量只限于平面测量,对于测到的许多目标并不是可以完全解析。船舶在峡水道航行时,雷达探测到的小目标在显示屏上被降噪设备抑制掉,许多有用的信息没有很好的应用,因此,改造雷达对于船舶在狭水道、分道通航制等狭窄水域航行显得十分重要。
1狭水道航行问题分析
船舶在进出航道、狭水道、岛礁区和某些沿岸水域,存在着一些浅水区。当船舶(特别是大型船舶)航行到这些区域之前,首先要确定本船是否能够安全驶过。这由两个问题所决定,一是船舶要通过的浅水区所要求的最小安全水深,即船舶安全驶过浅水区,当时的实际水深必须大于或等于最小安全水深,传统上对于安全水深的计算为:
海图水深+潮高+(CD-TD)≥船舶吃水+富余水深
这就要求潮高必须大于或等于一个最小安全值,该值便为最小安全潮高:
最小安全潮高=吃水+富余水深-海图水深-(CD-TD)
在某些水道的上空,还建有横跨水道的桥梁或高空电缆等,这些建筑物构成了船舶航行的空中障碍物。为确保安全通过这些障碍物,必须仔细计算潮高。然而高架桥底部至平均大潮高潮面的距离为净空高度,它和大潮升之和为潮高基准面以上的可利用高度。而潮高基准面以上相对船舶航行所要求的安全高度为当时潮高、水面以上船舶的最大高度和为了保证安全通过所要求的安全余量三者之和。由于可利用空间对于某个横空障碍物是固定的量,为了船舶的安全通过,潮高就不能大于某值,这即是所谓的最大安全潮高。
最大安全潮高=大潮升+净空高度-水面至船舶大桅顶端的高度-安全富余量
根据船舶本身情况和航道条件求得安全潮高后,便可根据《潮汐表》求得合适的通过浅滩或横空障碍物的时间,以便船舶安全通过。(如图1)
显然,船舶在航行中在计算过桥防搁浅问题上有三点不利因素:
(1)潮汐计算具有静态和动态问题。所要的水深数据来自测深仪前一时间测得,而船在航行中,峡水道的河床并不是全部都是一样的高度,它是高低起伏存在变化,因此,所计算的数据在船舶过大桥时,存在着安全风险。
(2)潮汐计算不准确。船舶在峡水道中航行,船只较多,如果赶上潮汐在回转期间,计算的结果就更不准确,并且分散驾驶员操船的注意力,原本在狭水道航行精神就比较紧张,再加上繁琐的过桥潮汐计算,很容易导致疲劳驾驶,给船舶的航行安全带来隐患。
(3)河床地形存在不确定性。河床不是一成不变的,伴随的潮汐和地壳运动以及海事或其他因素影响,海图深度每时都在变化,然而海图水深则是根据英版航海通告每周更改,这就导致航行数据更新慢,并且不全面,给峡水道航行的船舶带来隐患。
2雷达改进理论研究
根据以上3点船舶过桥安全隐患,提出了改造方案。时时跟踪测绘安全余量和富余水深,为驾驶员准确提供数据,判读过桥位置。
测量安全余量的计算为:h=2.2(√Ha+√Ht)tanθ
应用公式设置在计算程序时需注意的问题
(1)它是建立在大气压强为1013hpa
(2)在海平面上温度为15℃
(3)相对湿度为60%,在整个对流层内相对湿度不随高度变化。
第二种解析公式计算方法:
HMAX=TANθ(PTG A?λ?δ0/64π?pmin)?
式中:PT---雷达峰值功率(w);G A---天线增益;λ---工作波长(m);pmin---接收系统门限功率(w)δ0---目标的有效散射面积(m?)由于距离为开四次方根的结果,因此在影响目标的雷达测高的所有因素中,每一项技术参数的影响都是有限的。
3改进后雷达的应用
下面对性能标准达到要求的双波段雷达能够发现典型目标的参考距离进行分析,标准雷达天线高于水面15米,海面无杂波干扰、无降水的正常大气传播条件下:
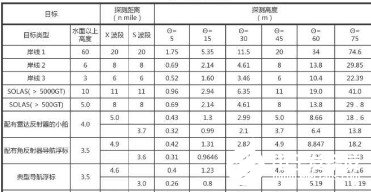
通过以上表格得出雷达在测量大目标上,几乎没有分别,但是在小目标的发现能力上,X波段的雷达具有优势,使用X波段雷达的船舶可以在较远的距离发现小目标。
通过以上数据可以得出,由于船舶的接近某个物标,探测到的高度角越来越小的特点,同时所测到的距离距离也越来越近。利用这一特性,对当前水域以三维形式掌握,无论是水下起伏的变化,还是对小岛、灯塔、岬角等均有突出物进行定位精确的导航。
4结论
本文通过采用雷达电磁波微分差技术,改善了雷达一维测量的缺陷,达到了提高航行安全的目的。通过提高雷达的测量数据利用率,将雷达与测深仪数据进行合成计算,其数据结果将大大提高对在狭水道、分道通航制等狭窄水域航行的船舶安全。
-
雷达
+关注
关注
50文章
2930浏览量
117463 -
电磁波
+关注
关注
21文章
1454浏览量
53813 -
测量导航
+关注
关注
0文章
2浏览量
5563
发布评论请先 登录
相关推荐
电磁波引擎
电磁波正交极化,电磁波正交极化原理是什么?
电磁波的应用教程详解
电磁波是如何产生的_电磁波由什么组成_电磁波对人体的危害
电磁波辐射对人体影响_电磁波辐射的原理_如何防止电磁波辐射
电磁波如何产生
电磁波极化及其应用
如何消除电磁波的干扰

如何隔离电磁波





 工商网监
工商网监
评论