 中国ADAS突围的差异化道路:打造更懂中国驾驶场景的感知算法
中国ADAS突围的差异化道路:打造更懂中国驾驶场景的感知算法
引言
2016年特斯拉的致命事故让人们意识到了精准感知的重要性。一个关键目标未识别,就会导致车毁人亡。
中国驾驶场景的特殊性,决定了必须有本土化的感知解决方案,才能满足自动驾驶的高可靠性要求。提供专门针对中国驾驶场景开发的视觉感知算法成为中国创业公司打造ADAS方案差异化竞争力的一个重要切入点。通过全面掌握国内驾驶场景,并建立最符合国情的数据样本库,用更懂中国驾驶场景的感知算法帮助自动驾驶在国内的落地。
自动驾驶致命事故的启示:可靠的感知是自动驾驶安全性的基石
2018年3月, Uber自动驾驶测试车在亚利桑那州测试时造成一名女子死亡(图1), 这是全球首起自动驾驶致命事故。
美国国家运输安全委员会近日披露,导致事故的主要原因是Uber自动驾驶系统无法准确识别在人行横道以外出现的行人。自动驾驶系统数据显示,车辆雷达在碰撞发生前大约6秒时观测到这名推着自行车穿过马路的行人,当时汽车时速69公里,系统反复将其识别为不明物体、车辆、自行车等(图2)。
特斯拉Autopilot致命事故分析
2016年,美国一辆特斯拉Model S电动汽车在途径十字路口的时候,撞上了一辆正在左转的卡车,这是特斯拉Autopilot系统发布以来的第一起致命事故。


图3 特斯拉Autopilot系统未能检测到侧面行驶过来的卡车
特斯拉指出:“在强烈的日照条件下,驾驶员和Autopilot系统都未能检测到拖挂车的白色车身,因此未能及时启动刹车系统。由于拖挂车正在横穿公路,且车身较高,这一特殊情况导致Model S从挂车底部通过时,其前挡风玻璃与挂车底部发生撞击。”
一个关键目标未识别,就会导致车毁人亡。惨痛的教训让人们意识到了精准感知的重要性。
来自中国特色驾驶场景的挑战
国内的道路交通状况,跟国外相比,有很大区别。
一方面,道路更加复杂且不规范,因此国外开发的视觉感知算法,需要针对国内道路进行专项的训练和加强,才能获得较为理想的感知结果。
另一方面,关于交通参与者(车辆、行人、骑行者)方面,目标类型更加“中国化”(比如驮着奇形怪状货物的快递电动车),且在规则的遵循上也缺乏共识化的路权意识,因此既要针对国内特色的异形目标进行专项识别,也需要加强“提前”感知的能力,比如在车辆或行人目标只暴露出一部分时就能够识别,否则在其他司机进行强行加塞等侵略性驾驶时,自车容易与不守规矩的目标车辆发生碰撞。
下面我们将从道路设施和交通参与者两个维度,分析中国驾驶场景的特殊性。
国内道路设施的特殊性
在国内,虽然现代化的高速路、城市高架路越来越普及,但是也存在很多老旧的、非结构化(图1)的甚至不合理的道路设计(图2),这些场景已经大大增加了视觉感知的复杂度。
上图展示的非结构化路段,再加上交通参与者频繁地进行道路穿插,对自动驾驶系统视觉感知算法目标识别的全面性、实时性和准确率都提出更高的要求。
另外,如图2所展示的,国内有不少的十字路口直行道有错位设计,比如进入路口时会多出一条车道(为了增加路口车流量,疏通交通);或者车道在进入十字路口时为直行道,在出十字路口时对应的竟是左拐车道。这种流行的错位设计,会徒增许多并道汇流需求。这就更加容易导致车辆在十字路口进行变道,人为加剧国内变道频繁的现象,给感知能力带来挑战。
相比于国内的道路交通状况,我们再对比一下欧美在“城乡结合部”、繁忙十字交通路况、高速公路以及普通城市道路上的场景复杂度(图3)。
从上图可以感受到,国外的所谓复杂道路场景,相比于国内来讲,还是相对简洁明了的。这归功于良好的道路规划和清晰的路权意识。如果基于这种“简化”场景进行感知算法的开发,很难覆盖国内的极端情况。然而事实情况是,目前国内主流的视觉感知算法,都是来自Mobileye等国外公司,且开发场景也基于国外驾驶场景。
除此之外,国内还存在不少国外较为少见的交通信号灯和交通标志。上文提到国内道路设计的问题,事实上,正是由于道路问题导致交通疏导非常依赖于红绿灯及交通标志的支持。而为了满足各种道路指引需求,国内的红绿灯设计可谓五花八门,如下图。
除了红绿灯和交通标志,国内还常用汉字注释来的引导交通秩序,比如道路旁的汉字立牌、车道中的汉字指示等。这些场景的攻克很难依靠国外企业,只能依靠本土企业,立足国内场景,解决本土需求。
国内交通参与者的特殊性
国内的一些交通参与者,在国外非常少见。典型的如城市道路中骑电动车频繁穿插的快递小哥,以及城乡结合部存在的各种“异形”交通工具,在识别上有一定难度,有漏检现象产生,需针对性的训练。而类似的情况在国内很多,如果能够立足国内场景,及时补数据,就能够更快地覆盖并提升感知性能。
另外,国内的高速公路及城市高架路等封闭道路常有行人等非机动车目标出现,这对行人的远距离准确检测提出了非常高的要求。如果算法在国外没有针对这种少见的场景进行专项训练,一旦实际运行过程中出现,是很危险的。
如何打造更懂中国场景的视觉感知算法?
地平线自2015年成立以来,便积极扎根国内,基于国内道路视觉数据构建自己的图像样本库;且针对典型中国场景进行扩充和训练,有针对性地优化了视觉目标感知的全面性、实时性,同时提高了关键特色目标的准确率。其中,全面性方面,地平线感知算法可支持10类动态目标感知、53类静态目标感知、23类语义分割;实时性方面,支持1080P @ 30 FPS;准确率方面,关键区域车辆检测率大于99.6%,尤其是行人检测方面,检测距离达到70米,检测率超过99.1%,误报率小于1次/百公里。除此之外,地平线也建立了长效机制,保证及时升级对新挑战场景的感知能力。从技术角度看,依靠对国内交通更理解的本土开发人员,再加上对本土场景库进行持续扩充迭代,才能开发出更匹配中国国情的算法。具体来说,包括:
针对国内交通工具的特点,地平线扩大(或本土化)道路目标识别种类,加入类似老人代步车、装满快递包裹的快递电动车/三轮车等中国特色交通工具,有效帮助城市领航等高级别自动驾驶功能,以及城乡结合部的十字路口预警等功能在国内的落地;同时针对中国行人和骑行者特有的行走、骑行特点,有效增加了对行人的感知准确率;
针对国内非结构化道路较多以及道路设计不合理、十字路口车道线复杂的特点,地平线进行了本土化优化,提高了车道线的感知能力,并扩大了感知范围;针对中国特色的交通信号灯和交通标志方面,地平线扩大(或本土化)对国内道路和车道特点的感知识别能力。例如,增加对带箭头等非标准红绿灯的感知识别;考虑地面失效箭头仍旧由痕迹的问题,避免误报;逐步加强对临时交通标志安装位置歪斜、角度畸形等国内实际场景的识别能力,避免关键信息的漏检。再加上国内道路设计不合理,交通参与者严重依赖交通标志的引导,因此对于国内特色交通标志的感知能力,是地平线重要努力方向,以获取更多有价值、置信度高的交通信息,助力自动驾驶在国内的落地进程;
针对国内交通参与者缺乏交通共识导致的道路混乱、目标运行轨迹难以预判的情况,地平线算法加强了对“鬼探头”等目标未露出全貌时的目标识别能力,力争提前检出危险关键目标,给车控算法(AEB-P、AEB-C等features)提供更加及时的目标信息。同时增强对任意角度目标(机动车、非机动车等)的识别。
发布评论请先 登录
相关推荐
易飞扬走过2024——避开红海 专注差异化
运营商如何实现差异化连接

RISC-V在中国的发展机遇有哪些场景?
「腾讯IoT Video+微信小程序」觅感猫眼方案助力锁厂打造差异化产品优势

江苏移动携手华为率先完成全省范围智能差异化体验保障商用验证
鸿蒙ArkUI-X平台差异化:【运行态差异化(@ohos.deviceInfo)】

毫末和高通联手官宣,首批8620量产智驾产品开启合作

探索IPE差异化体验,助力浙江移动网络价值变现
华为携手中国移动浙江公司 实现全球首个5G-A核心网智能差异化体验保障
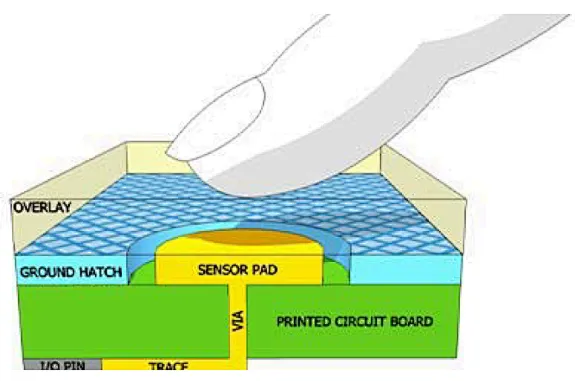
用电容式触摸感应技术实现HMI差异化解决方案
未来已来,多传感器融合感知是自动驾驶破局的关键
绿展科技首创采集区点亮发光指纹识别模组,3种发光模式助力智能门锁厂家切入高端赛道实现差异化竞争





 工商网监
工商网监
评论