 详细解读红外遥控解码
详细解读红外遥控解码
红外遥控是我们现实生活中必不可少的一员。遥控,顾名思义即在遥远的地方进行控制,其实也就是说远程通信。红外遥控就是以红外线为传输介质的遥控。
红外遥控器是怎么工作的?其实它内部就是有一个单片机,单片机的I/O口控制一个红外LED灯(当然一般会加外部放大电路以增大传输距离),在内部编码后发送出去,然后电视或者空调之类的可以用红外遥控控制的电器在接收到红外信号后就会进行解码,并根据制定好的协议执行特定动作,比如电视可能换台、调节音量等。现在有的手机就带有红外遥控功能,其实也是用单片机的功能实现的。
红外遥控解码
有的时候,我们希望模拟一些遥控器的功能,这时候就要对这些遥控器的数据进行解码。
在进行解码前,我们先来了解一下红外编码。红外编码有很多种,最常用的编码是NEC编码。NEC格式的编码如下:
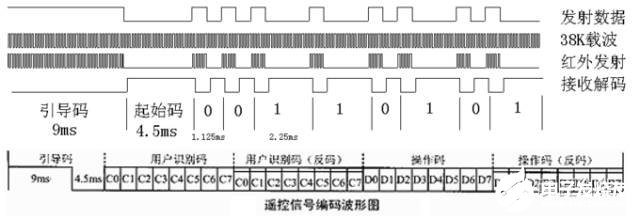
NEC格式的红外编码是连续的32位二进制码组。32位二进制码组之前的引导码,用于区分每次的传输;在起始码之后的才是32位二进制码组,其中8位用户识别码和8位反码(反码主要用于)校验,用户识别码的作用主要是区分不同品牌的遥控器;接着就是8位操作码和反码,用于表示哪个按键被按下。
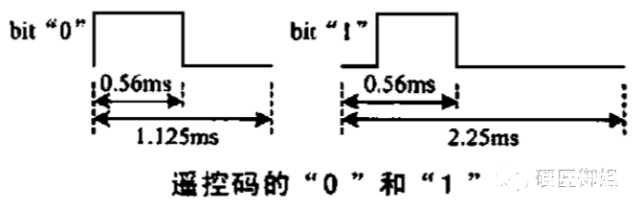
NEC格式的编码除引导码和起始码外,用于交互数据的信息采用脉宽调制的串行码,在38kHz的载波下,以脉宽为0.565ms、间隔0.56ms、周期为1.125ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔1.685ms、周期为2.25ms的组合表示二进制的“1”,其波形如下所示:
了解了红外编码,就可以进行红外解码了。
实现方法
一般,进行红外解码我们需要先将接受到的有效信号与外界环境的干扰信号分离开,这就是载波的作用。现在市面上有很多一体化红外接收头,内部是红外接收二极管 +放大电路 +解调器。当接收到红外信号后,先将其放大,然后把38kHz的信号保留下来。需要注意的是一般一体化红外接收头接收到信号时输出是低电平,没有接收信号时是高电平。
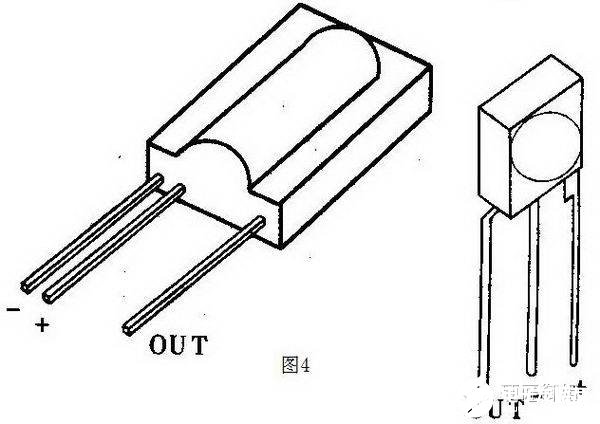
上面是常用红外接收头的引脚,“OUT”脚接单片机的I/O口,“-”脚接电源负极,“+”脚接电源正极。
接好电路,就要进行解码工作了.其实解码工作主要是识别引导码,还有数据“0”“1”。我们看波形图,只要识别红外接收头“OUT”引脚高低电平持续的时间就可以了。这个可以用定时器中断完成,也可以用延时来判断。由于只完成解码工作,我们就用延时的方法更方便。
首先,红外接收头没有接到信号时是高电平,等待其变低。之后,每隔900us测量一次,若在10次内电平变高,说明这不是引导码,退出重新开始;若10次内并没有变高,说明这就是引导码,继续下一步。接着可以不判断起始码,就是直接等待引脚电平变高再变低,就可以接收数据了。
接收数据,就是进行判断“0”和“1”。从位的定义我们可以发现“0”、“1”均以0.56ms的低电平开始,不同的是高电平的宽度不同,“0”为0.56ms,“1”为1.68ms,所以必须根据高电平的宽度区别“0”和“1”。
每一位“0”或者“1”在接收头接收信号即低电平的时间都是一样的,直接等待低电平过去,在高电平时延时600us,如果600us时还是高电平,说明是“1”;如果是低电平即高电平过去了,说明是“0”。将这些数据结合到一起,就是接收到的编码了。
将单片机的串口与电脑接好,就可以在串口显示我们读到的红外遥控数据了。
实现代码:
#include <reg52.h>
// --- 红外接收一体化输出口 ----------------------------------
sbit IR_Out = P3^2;
bit START_Flag = 0;
bit BOOT_REPEATING_CODE_Flag = 0;
unsigned char DATA[4] = {0};
bdata unsigned char TEMP_BIT;
sbit B0 = TEMP_BIT^0;
sbit B1 = TEMP_BIT^1;
sbit B2 = TEMP_BIT^2;
sbit B3 = TEMP_BIT^3;
sbit B4 = TEMP_BIT^4;
sbit B5 = TEMP_BIT^5;
sbit B6 = TEMP_BIT^6;
sbit B7 = TEMP_BIT^7;
// --- 有无遥控信号判断函数 ----------------------------------
bit START_Judge();
// --- 连发码判断函数 ----------------------------------------
bit BOOT_REPEATING_CODE_Judge();
// --- "0"和"1"识别 ------------------------------------------
bit H_L_LEVEL_Judge();
bit START_Judge()
{
bit TEMP_Flag = 1;
unsigned char i = 0;
//在正常无遥控信号时,一体化红外接收头输出是高电平,程序一直在循环。
while ( IR_Out == 1);
//重复10次,目的是检测在6876~8352微秒内如果出现高电平就退出解码程序
for(i =0;i <9; i++)
{
DELAY_Us(800); // 测试实际延时约为764~928us
if ( IR_Out == 1 )
{
TEMP_Flag = 0;
break;
}
}
return TEMP_Flag;
}
bit BOOT_REPEATING_CODE_Judge()
{
bit TEMP_Flag = 1;
while( IR_Out == 0 ) ; // 等待高电平避开9毫秒低电平引导脉冲
DELAY_Ms(1); // 测试实际延时约为1.007ms
DELAY_Ms(1); // 测试实际延时约为1.007ms
DELAY_Us(200); // 0.086ms
DELAY_Us(200); // 0.086ms
DELAY_Us(200); // 0.086ms
// 共计2.272ms
if( IR_Out == 0 )
{
TEMP_Flag = 1; // 是连发码
}
else
{
TEMP_Flag = 0; // 不是连发码,而是引导码
}
return TEMP_Flag;
}
bit H_L_LEVEL_Judge()
{
while( IR_Out == 0 ); // 等待地址码第一位的高电平信号
DELAY_Us(800); // 测试实际延时约为764~928us
if ( IR_Out == 1)
{
DELAY_Ms(1); // 测试实际延时约为1.007ms
return 1;
}
else
{
return 0;
}
// --- 串口初始化 --------------------------------------------
void DELAY_Us(unsigned int Us)
{
unsigned int x;
for(x = 0; x <= (Us/200-1); x++);
}
void DELAY_Ms(unsigned int Ms)
{
unsigned int x,y;
for(x = 0; x <= (Ms-1); x++)
{
for(y = 0; y <= 120; y++);
}
}
void main()
{
unsigned char i;
UART_Initial();
IR_Out = 1;
while(1)
{
START_Flag = START_Judge();
BOOT_REPEATING_CODE_Flag = BOOT_REPEATING_CODE_Judge();
if ( START_Flag && !BOOT_REPEATING_CODE_Flag )
{
for(i =0;i <4; i++)
{
B0 = H_L_LEVEL_Judge();
B1 = H_L_LEVEL_Judge();
B2 = H_L_LEVEL_Judge();
B3 = H_L_LEVEL_Judge();
B4 = H_L_LEVEL_Judge();
B5 = H_L_LEVEL_Judge();
B6 = H_L_LEVEL_Judge();
B7 = H_L_LEVEL_Judge();
DATA[i] = TEMP_BIT;
}
for(i =0;i <4; i++)
{
SBUF = DATA[i];
while( TI == 0 );
TI = 0;
}
}
}
}
void UART_Initial()
{
SCON = 0x50; // SCON: 模式 1, 8-bit UART, 使能接收
TMOD |= 0x20; // TMOD: timer 1, mode 2, 8-bit reload
TH1 = 0xFD; // TH1: reload value for 9600 baud @
// 11.0592MHz
TR1 = 1; // TR1: timer 1 run
EA = 0; // 关闭总中断
ES = 0; // 关闭串口中断
}
}
注
1、红外遥控的编码不只NEC,还有很多也有广泛应用如RC-5,RC-6等。
2、上面的代码所用指令是STC 89C52单片机,如需用其它芯片请另行更改。
责任编辑:wv
-
红外遥控解码
+关注
关注
0文章
2浏览量
967
发布评论请先 登录
相关推荐
高清电视盒子方案分享,红外遥控适配过程全解析
红外接收头的故障有哪些_红外接收头的寿命一般是多少
遥控器解码器怎么使用
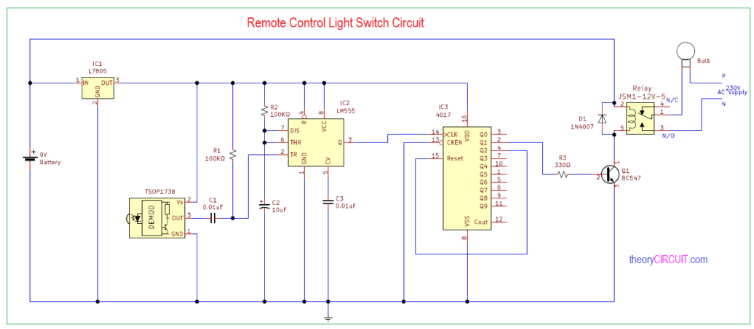
红外遥控灯开关电路图





 工商网监
工商网监
评论