 通信教程的04_SPI接口说明及原理
通信教程的04_SPI接口说明及原理

本教程由作者strongerHuang于2019年09月原创发布。
版权所有:禁止商用
申明:该文档仅供个人学习使用,转载请公众号联系作者授权。
1写在前面
SPI:Serial Peripheral Interface,是串行外设接口。
SPI是由摩托罗拉于 1985 年前后开发,是一种适用于短距离、设备到设备通信的同步串行接口。
从那时起,这种接口就已成为许多半导体制造商,特别是微控制器(MCU)和微处理器(MPU)采用的事实标准。
2SPI接口
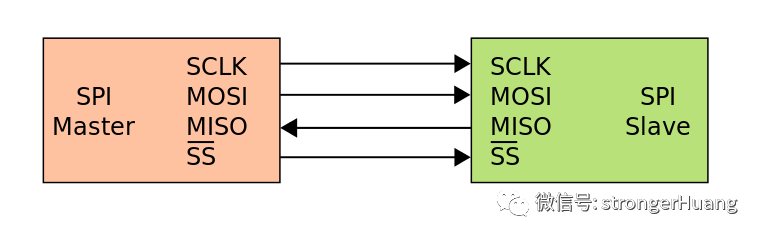
SPI总线是一种4线总线,通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以。
MOSI:Master Output Slave Input,主设备数据输出,从设备数据输入;
MISO:Master Input Slave Output,主设备数据输入,从设备数据输出;
SCLK:Serial Clock,时钟信号,由主设备产生;
SS:Slave Select,从设备选择信号,由主设备控制;
上面的SS信号,也可以理解为CS信号,一般是低电平有效,所以也是NSS(非)信号;
CS:Chip Select,片选信号(从设备使能/选择信号),由主设备控制;
2.1 一主一从
最基本的SPI通信就是一主一从,比如:一个STM32作为主机,一个W25Q16(SPI Flash)作为从机。还有两个MCU之间进行SPI通信等。
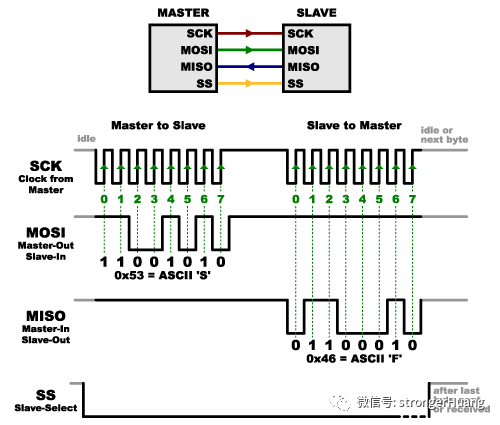
上图例子是主机发送一个字节数据(0x53),从机应答一个字节数据(0x46)。
2.2 一主多从
SPI可以一主一从(一个主机,一个从机),但也可以一主多从。一主多从常见有两种连接方式。
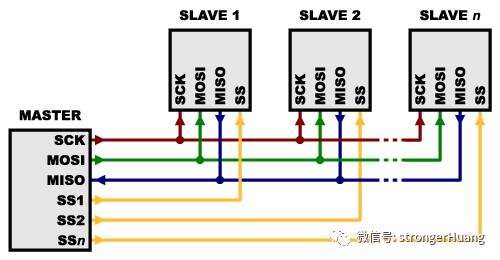
A.常规
通常,每个从机都需要一条单独的SS线,要与指定的从机通信,将该从机的SS线设为低电平,并将其余的保持为高电平即可。
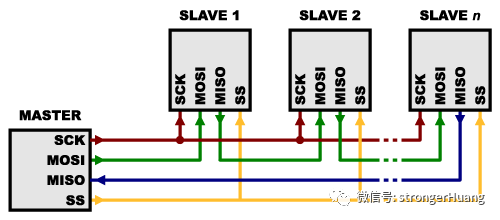
B.一条SS信号
某些应用只需要一条NSS即可(比如:移位寄存器),对于这种布局,数据从一个从设备移位到另一个从设备。
3SPI数据传输
SPI的通信比较简单,一个时钟传输一位数据(主机 -> 从机,或者从机 -> 主机)。
3.1 SPI时钟
理论上SPI的时钟频率可以做到很大,一般几MHz~几百MHz,拿常见的W25Q16来说,SPI最高支持80MHz。
SPI通信速率要结合实际情况,不能超过主机或从机支持的最大时钟频率。
3.2 SPI数据
SPI的数据分两个方向:
MOSI:主机 -> 从机
MISO:从机 -> 主机
SPI通信有一个“缺点”:没有指定的流控制,没有应答机制确认是否接收到数据。
可以理解为:不知道是什么时候主机发给从机,什么时候从机发给主机,到底该发多少字节数据等。
此时,需要通信的主机和从机达成约定,一般由主机进行控制读写的操作。
比如下面这个读写SPI Flash数据的操作:
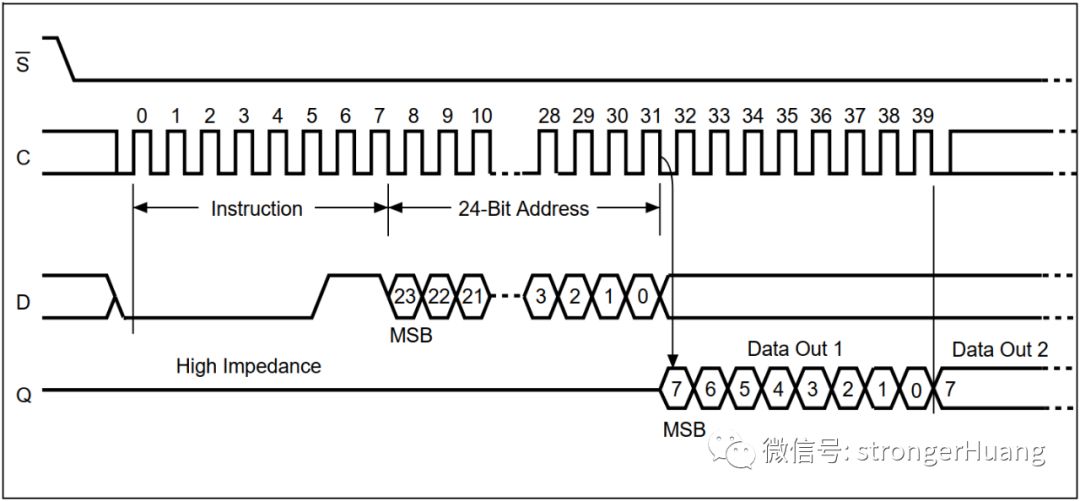
前面1字节是指令,紧接着再3字节(24位)地址,都是由主机发送给从机。之后,主机读取数据(由从机发送出来)。
3.3 时钟极性和相位
除了设置时钟频率外,主机还必须配置与数据有关的时钟极性和相位。
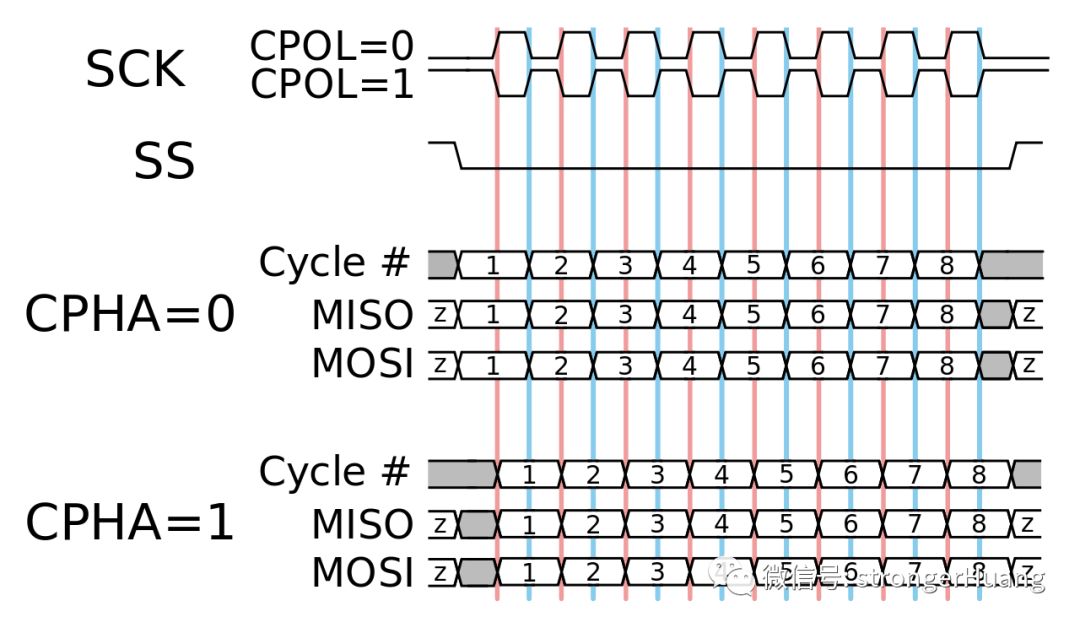
CPOL确定时钟的极性,极性可以通过简单的逆变器进行转换。
CPHA确定相对于时钟脉冲的数据位的时序(即相位)。
一般集成有SPI外设的处理器,都有SPI相关的配置寄存器,拿STM32来说,参考手册里面有详细介绍SPI配置的信息。
建议大家结合时序图理解,不能死记硬背。
5
说明
1.该文档仅供个人学习使用,版权所有,禁止商用。
2.本文由我一个人编辑并整理,难免存在一些错误。
3.本文收录于公众号『嵌入式专栏』,关注微信公众号回复【通信教程】即可查看全系列教程。
6最后
-
通信
+关注
关注
18文章
6457浏览量
140278 -
SPI接口
+关注
关注
0文章
289浏览量
36901
发布评论请先 登录
常用通信接口速查表

深入解析SPI通信:高速全双工,如何连接微控制器与万千外设?启明云端乐鑫代理

瑞芯微(EASY EAI)RV1126B SPI使用
国产SPI NOR Flash接口闪存介绍
SPI的多机通信
常见SPI温度传感器芯片有哪些?(什么是SPI温度传感器芯片?)

基于STEVAL-BMS1T的隔离式SPI通信技术解析与应用指南
Microchip 23AA04M/23LCV04M 4Mb SPI/SDI/SQI SRAM技术解析
嵌入式接口通识知识之SPI接口
SPI通信笔记:基础+动图+时序图+总结,一文吃透!
无线通信的隐形冠军:泽耀科技SPI射频模块硬核解析

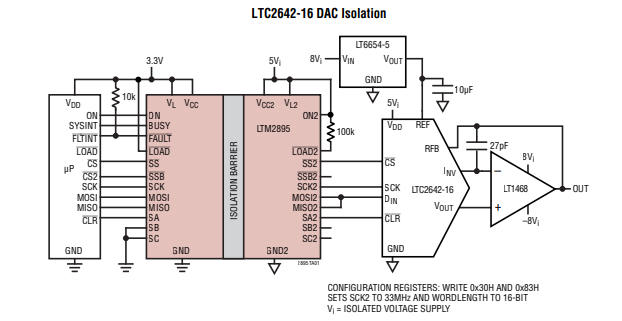
LTM2895 100MHz隔离型DAC SPI串行接口技术手册
ESP32平台 + SPI接口芯片DM9051ANX实现以太网通信
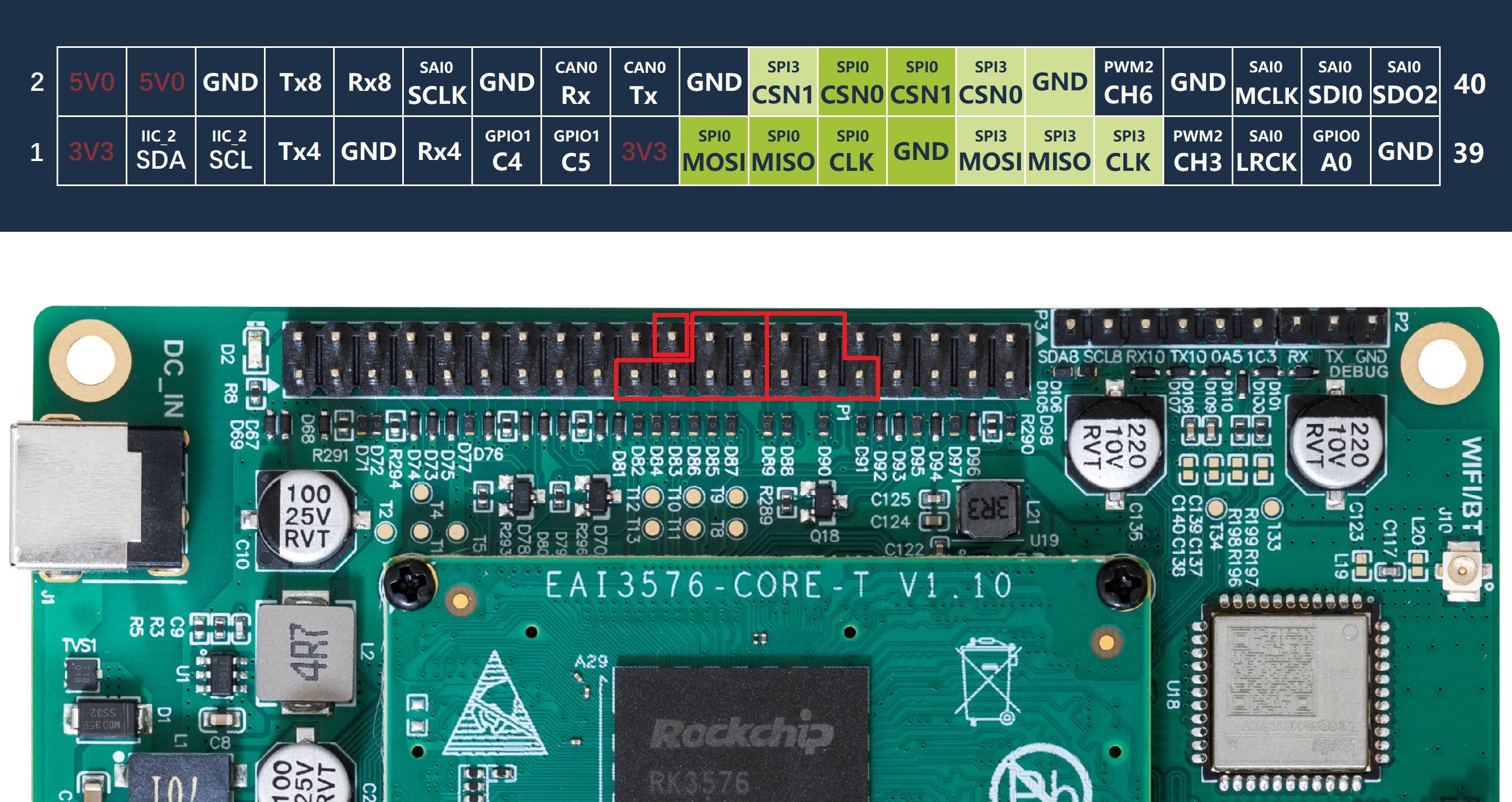
基于RK3576开发板的SPI使用说明



评论