 CANOpen系列教程06_ 结合代码理解CAN底层收发数据
CANOpen系列教程06_ 结合代码理解CAN底层收发数据
1写在前面
该教程前面讲述了许多关于CAN协议的一些概念,可能许多初学者看的云里雾里,那么本文将结合代码让大家理解之前讲述的内容。
因为关注我的人大部分都在学习STM32,我将结合STM32F103、标准外设库例程来让大家理解之前讲述的一些概念。
本文主要讲述内容:
1.传输数据相关参数
2.位时序及传输波特率
为方便大家理解,我将在最后提供对应例程「CANOpen系列教程06_CAN底层收发例程」。当然,本文只讲述代码中部分内容,某些配置参数放在后面讲述。
2
传输数据相关参数
传输数据相关参数其实主要就是前面《CANOpen系列教程04》讲述的“帧类型及格式说明”那一章节内容,建议先看下那些概念内容。
CAN总线传输的内容主要就是发送和接收,下面我将结合代码中发送和接收参数来让大家理解我们编程控制CAN总线上那些参数。
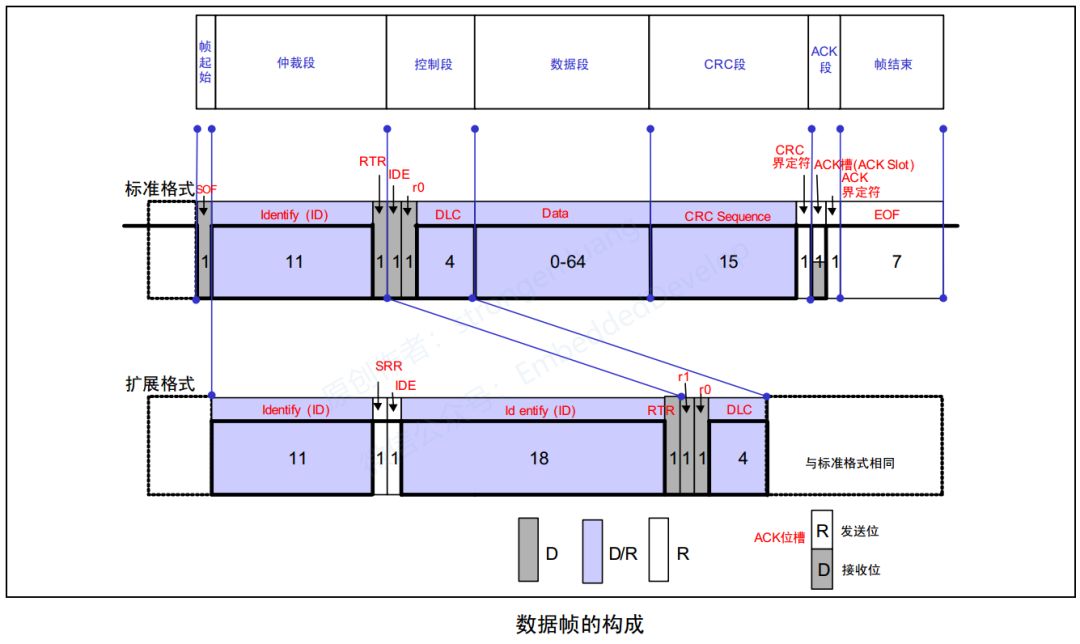
2.1 CAN总线数据帧
本文提供例程主要是CAN总线使用最多的数据帧为例,让大家理解数据帧传输由我们编程控制的参数。
先看下图回顾一下数据帧格式,其中有些字段内容由控制器自动完成,如:帧起始,CRC校验。而有些就是由我们编程控制,如:ID、数据等。
2.2 CAN发送代码
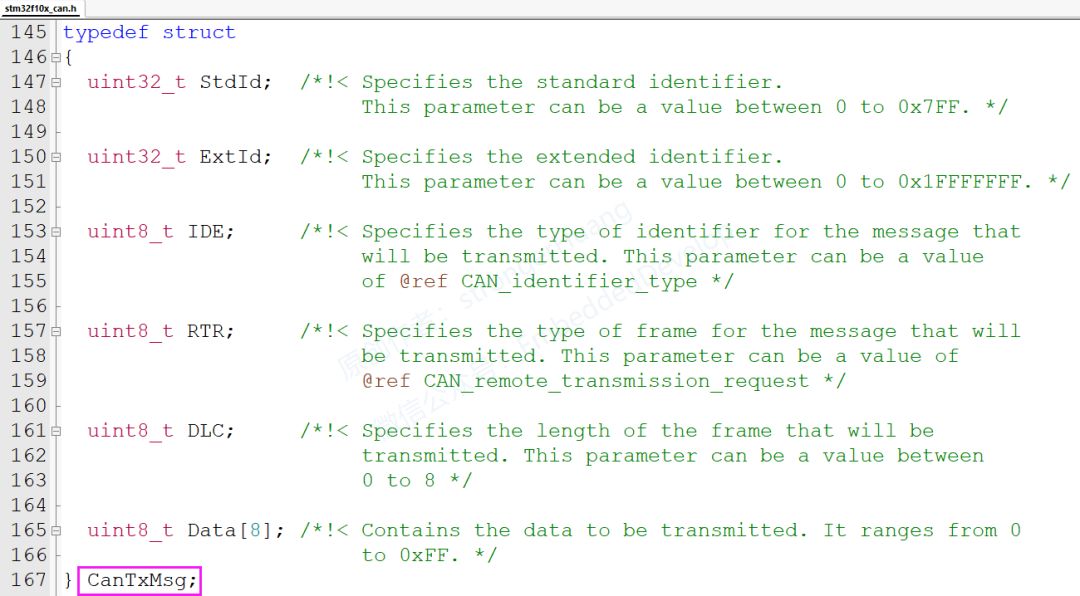
A.CAN发送数据结构
下图主要就是CAN发送由我们编程控制的参数。其实你会发现,主要就是上面帧格式中部分内容:ID、IDE、RTR、DLC、Data。
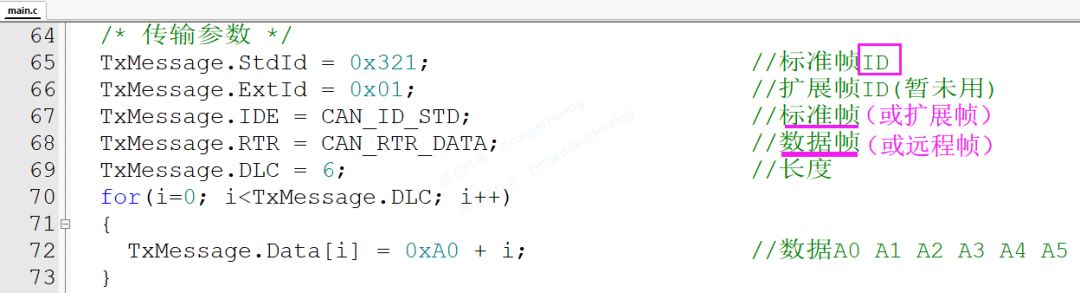
B.发送配置参数
下图为实际发送配置的参数。
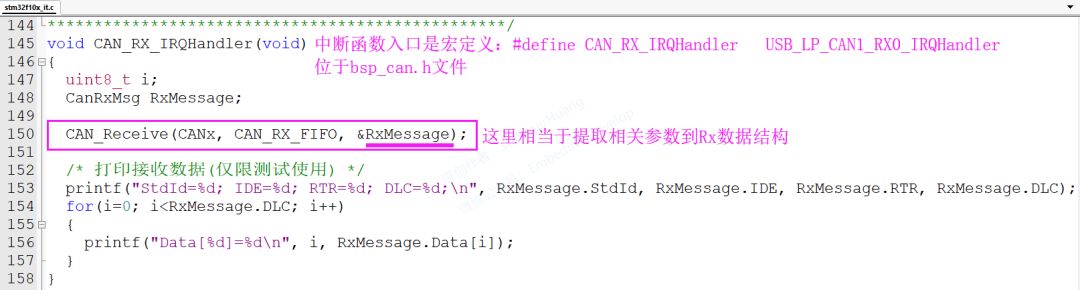
2.3 CAN接收代码
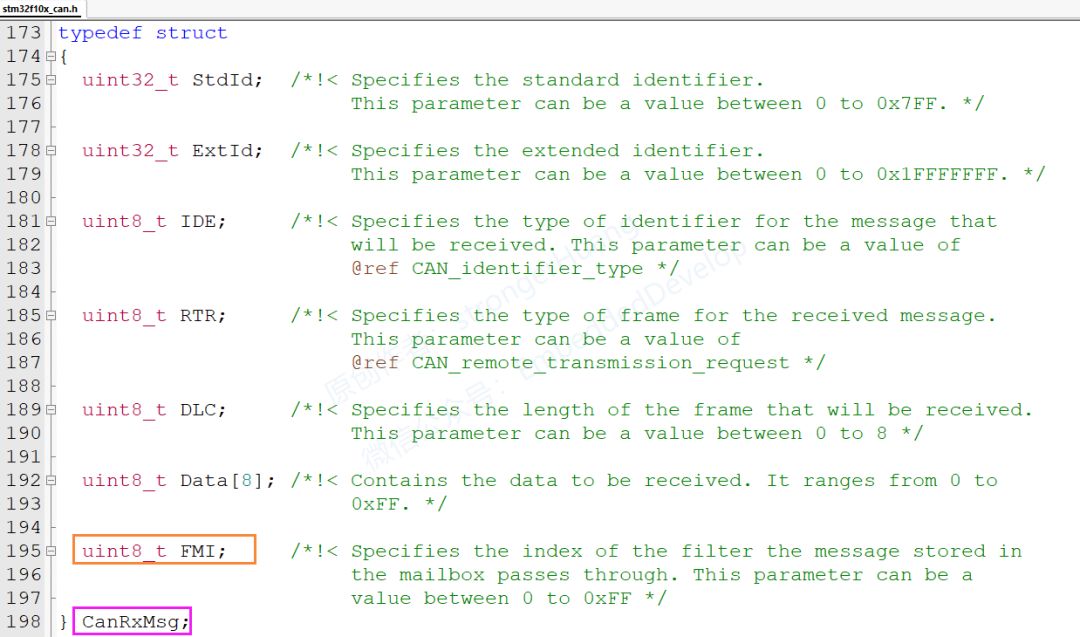
CAN接收其实和发送类似,CAN总线上的字段就那些,在接收端接收的那些参数无非就是发送端发送出来的那些参数。
针对STM32内部集成的CAN,接收数据结构多了一个FMI参数,大概意思就是接收消息邮箱筛选器索引。
接收操作
为方便初学者理解,这里这要就是使用中断接收CAN总线数据,在中断函数里面打印也主要是用于测试,一般实际项目打印不会出现在中断函数(打印相对耗时)。
3
位时序及传输波特率
同样,在前面《CANOpen系列教程04》中有讲述“位时序及传输波特率”的概念。其实,位时序间接决定了传输的波特率。换句话说,传输的波特率由位时序几个参数决定。
看下图,回顾一下波特率计算公式:
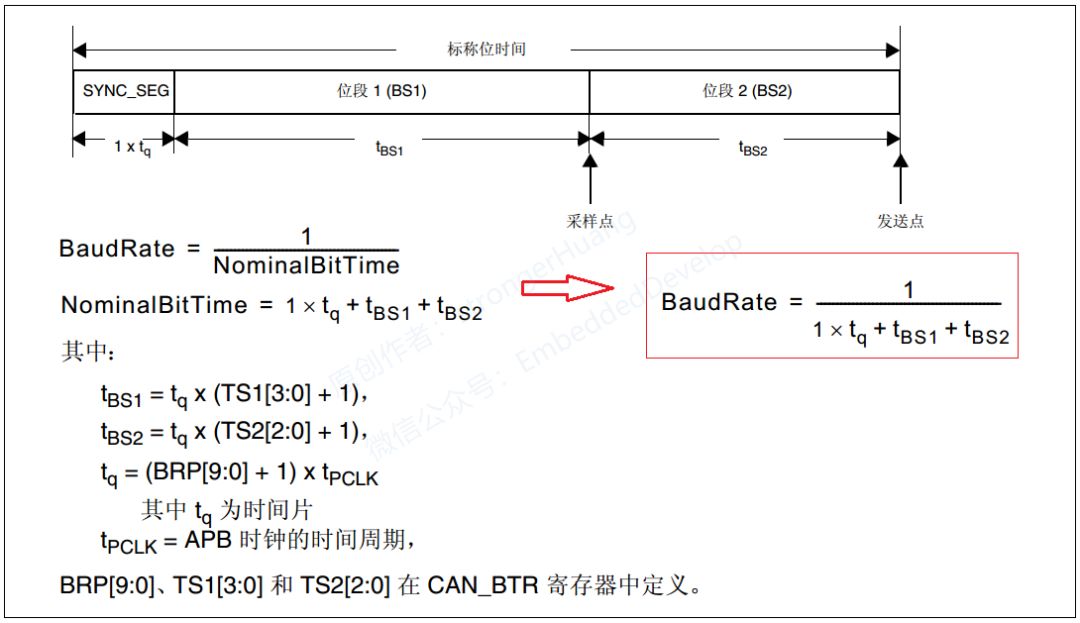
3.1 波特率配置代码
结合上图计算公式和下图代码,可以看出位时序中几个参数和波特率的关系。波特率为1M时,几个位时序参数可以配置为如下图值:

提示:
36M代表CAN时钟,具体要看时钟相关配置。
波特率固定,位时序参数可以不同。比如波特率固定为1M,位时序参数可以为上图配置;也可以修改其中的值,如修改位段1为CAN_BS1_5tq,位段2为CAN_BS2_3tq。只要遵循波特率计算公式即可。
-
CAN
+关注
关注
57文章
2744浏览量
463636 -
CANopen
+关注
关注
8文章
253浏览量
43583 -
代码
+关注
关注
30文章
4780浏览量
68539
发布评论请先 登录
相关推荐
三格电子- EtherCAT转CANopen/ CAN网关

CAN总线收发器的工作原理和应用
SN65HVD26x支持CAN FD(灵活数据速率)和冗余的Turbo CAN收发器数据表

TCAN1051具有CAN FD和故障保护功能的CAN收发器数据表
TCAN33x具备CAN FD(灵活数据速率)的3.3V CAN收发器数据表
TCAN1042具有CAN FD和故障保护功能的CAN收发器数据表
CAN收发器与CAN控制器的区别
【米尔-瑞萨RZ/G2UL开发板】5.CAN通讯进阶CANopen
医疗设备CAN/CANopen总线数据传输解决方案
思瑞浦发布高速CAN收发器TPT133X系列

CAN控制器、CAN收发器、CAN驱动器的区别是什么?
Profinet协议转换为CanOpen协议来连接CanOpen伺服驱动器的应用






 工商网监
工商网监
评论