 STM32四行【跳转程序】 引申出来的几条重要知识点
STM32四行【跳转程序】 引申出来的几条重要知识点
本文分享以下几点(引申出来的)重要知识点:
1.STM32是如何实现程序跳转的?
2.复位向量表
3.理解__set_MSP语句
关键字帮助
堆栈指针SP
控制寄存器CONTROL
1写在前面
上一篇文章《STM32 IAP应用编程几个要点》讲述的内容很多朋友都了解过,也都使用过ST官网提供的代码。但使用过的人有许多都没有深入了解,仅仅只是把代码下载到板卡中跑了一下而已(因为代码完全可以使用)。所以,很少有人研究其中细节的问题。
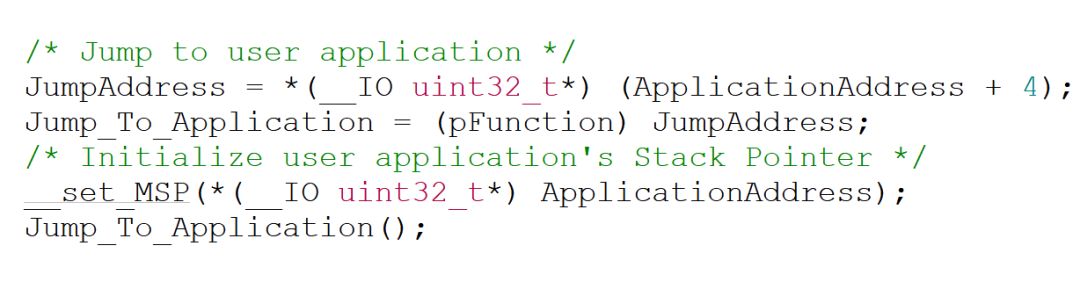
先看一下上图中四行跳转代码,接下来将围绕这四行代码拓展相关的内容。
2STM32是如何实现程序跳转的?
上图四行代码中有几个定义没有贴出来,下面一并贴出来:
#defineApplicationAddress0x8003000typedefvoid(*pFunction)(void);pFunction Jump_To_Application;uint32_t JumpAddress;
ApplicationAddress为0x8003000,代表应用程序起始地址为0x8003000。
1.JumpAddress = *(__IO uint32_t*) (ApplicationAddress + 4);
JumpAddress代表跳转地址,基于应用程序起始地址偏移4(这个偏移4下面章节讲述)。这个地址就是应用程序的复位地址,你可以理解为程序跳转到了应用程序复位的地址。
2.Jump_To_Application = (pFunction) JumpAddress;
将跳转地址JumpAddress强制转换pFunction类型,你可以理解为编译器将其编译成一个函数。
3.__set_MSP(*(__IO uint32_t*) ApplicationAddress);
这里是将把应用程序起始地址设为栈顶指针(__set_MSP下面章节讲述)。
4.Jump_To_Application();
设置PC指针为复位地址,你可以理解为跳转到应用程序的函数。
这里是讲述的大概内容,细节内容请往下看,看完下面细节再回来看本节内容。
3复位向量表
上面讲述了ApplicationAddress + 4“偏移4”这个问题,其实这个“偏移4”就是向量表的偏移地址:复位向量(PC 初始值)。
拿Cortex-M3(STM32F1)为例(其它M0、M4类似),Cortex-M3权威手册(中文)表 7.6 上电后的向量表:
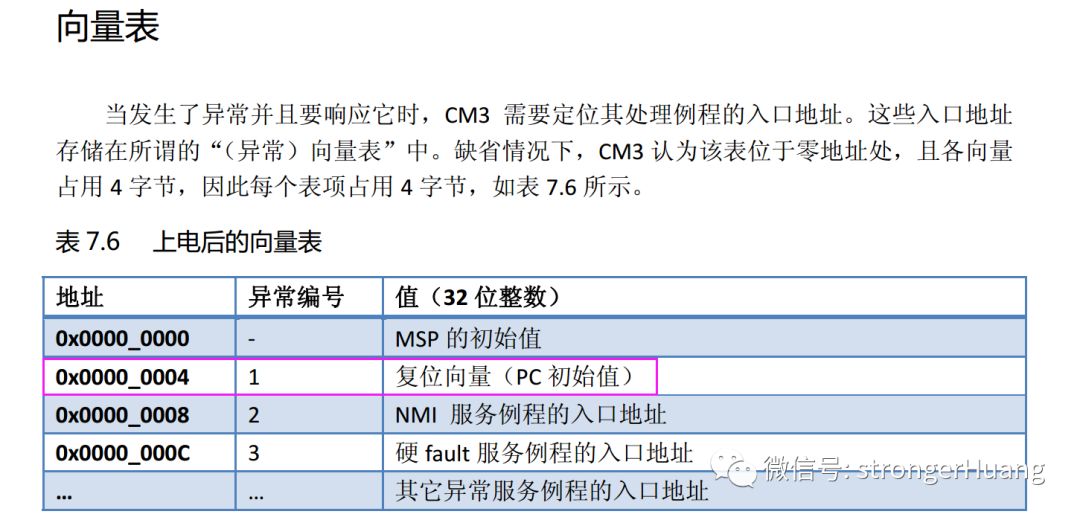
是什么意思呢?就是相对应用程序存储起始地址的一张向量表,而这张向量表就是按照这样的约定:偏移4的地址为复位向量(PC 初始值),也就是我们应用程序复位的地方。
同样,可以参看启动代码(以STM32F1为例):
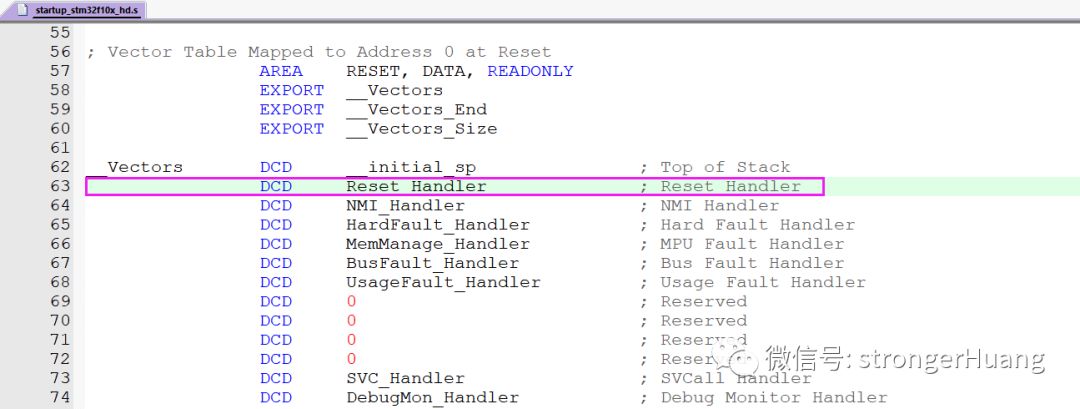
这里代码和Cortex-M3技术参考手册数据一一对应的关系。相信看了这两个地方的内容,大家能明白为什么会是ApplicationAddress + 4了。
4理解__set_MSP语句
1.拓展:MDK-ARM新功能
点看下图,放大,自己看截图代码(标记处):
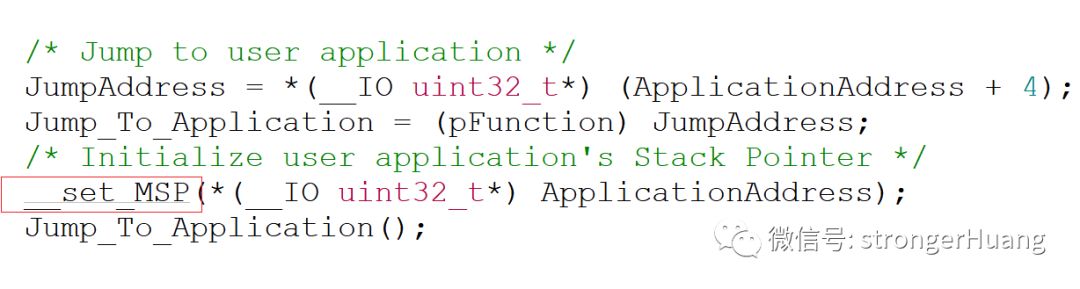
用MDK-ARM V5.25及以上版本打开工程,可以看到在__set_MSP下面有一行下划线,什么意思呢?
这是MDK-ARM V5.25的新功能(现在,MDK-ARM V5.26就快要出来了)具有上下文帮助(F1)的关键字将用浅灰色下划线突出显示。
详细可以参看:
http://www2.keil.com/mdk5/525
(提示:公众号不支持外链接,请复制链接到浏览器下载)
这里推荐阅读我另外两篇文章:
1.MDK v5.25比较实用的功能
2.MDK-ARM V5.26预览版更新的几条重要内容
2.理解__set_MSP语句
上面讲述的内容是想引申出来:鼠标放在__set_MSP的位置,按F1,就可以直接进入帮助文档。
下面是详细内容截图:
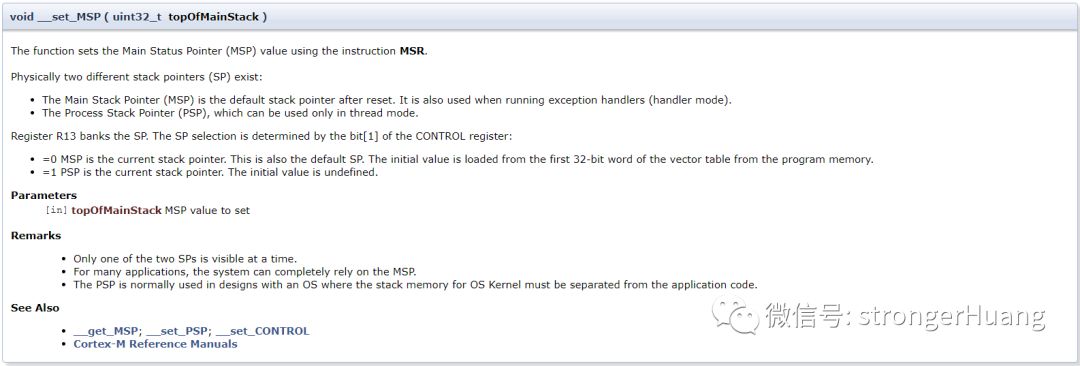
大概意思是:调用MSR指令设置主状态指针(MSP)的值。
物理上存在两个不同的堆栈指针(SP):
1.主堆栈指针(MSP),复位后的默认堆栈指针。在运行异常处理程序时也使用它。
2.进程堆栈指针(PSP),只能在线程模式下使用。
当引用R13堆栈指针(SP)时,由控制寄存器(CONTROL)的Bit[1]决定:
Bit[1]=0,用MSP;
Bit[1]=1,用PSP;
这里具体内容需要参看Cortex-M技术参考手册。
我的另外一篇文章《如何判断CPU是否正在执行中断函数》讲述了关于控制寄存器(CONTROL)的一种使用方法,可以参看我那一篇文章。
5“雪白”的图片
还是跟随热点,相信大家都听说了“关于谷歌回来的消息”,据知情人透露,谷歌回来几乎不可能。
当我现在(2018年8月9日)百度图片输入“雪白”的时候,已经不在是“雪白”的图片了,已经被百度程序猿GG加班加点改掉了。
百度图片搜索“雪白”如下图:
谷歌图片搜索“雪白”如下图:
-
STM32
+关注
关注
2270文章
10896浏览量
355784 -
复位
+关注
关注
0文章
171浏览量
24211 -
控制寄存器
+关注
关注
0文章
34浏览量
11486
发布评论请先 登录
相关推荐
单片机中断相关知识点
接口测试理论、疑问收录与扩展相关知识点

在VSCODE终端make时遇到错误要一行一行看然后定位,可以直接跳转点击或者VSCODE定位错误吗?
STM32F1 IAP操作读保护选项字节设置,APP使用系统复位跳转后无法运行IAP的原因?

STM32H747用DTCM-ram启动,跳转之后app程序无法运行的原因?
一篇搞定DCS系统相关知识点





 工商网监
工商网监
评论