 重温经典 PID 算法
重温经典 PID 算法

PID算法可以说是在自动控制原理中比较经典的一套算法,在现实生活中应用的比较广泛。
大学参加过电子竞赛的朋友都应该玩过电机(或者说循迹小车),我们要控制电机按照设定的速度运转,PID控制在其中起到了关键的作用。
说来惭愧,大学这门课程学的不咋滴,老师讲的课基本没听进去过。直到后面接触竞赛,算是对PID有了很基础的一点点认识,直到现在工作实际应用的比较广泛才知道它的重要性。所以,这里特地回顾一下。
Ⅰ什么是PID
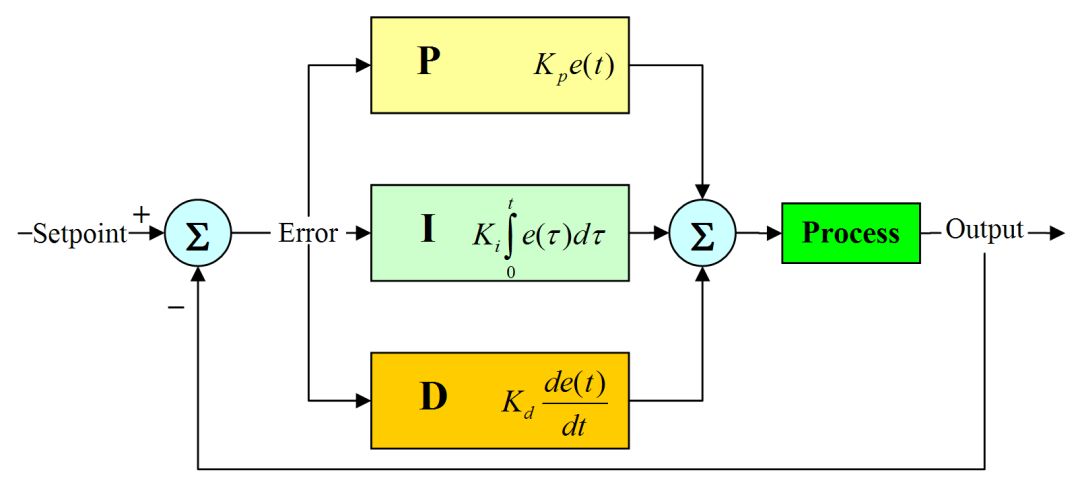
PID,即比例Proportion、积分Integral和微分Derivative三个单词的缩写。
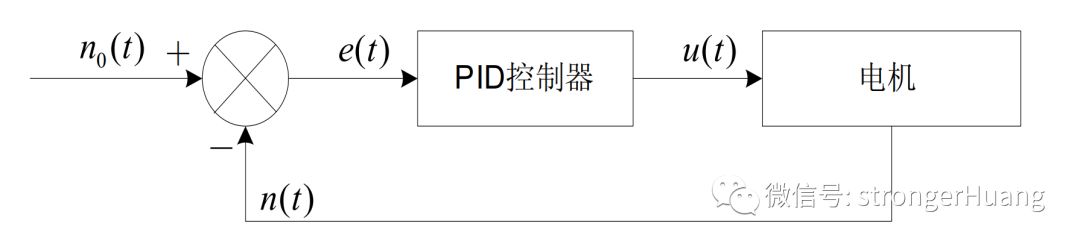
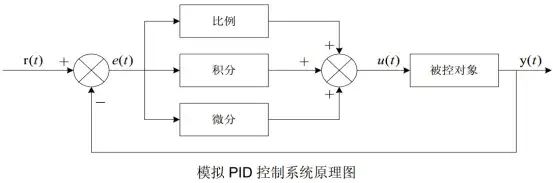
闭环自动控制技术是基于反馈的概念以减少不确定性,在闭环自动控制原理中,我们把它叫做“PID控制器”,拿控制电机来说,参考下面模型:
下面引用一段网上经典的话:
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!简单的不是原始的,简单的也不是落后的,简单到了美的程度。
ⅡPID原理
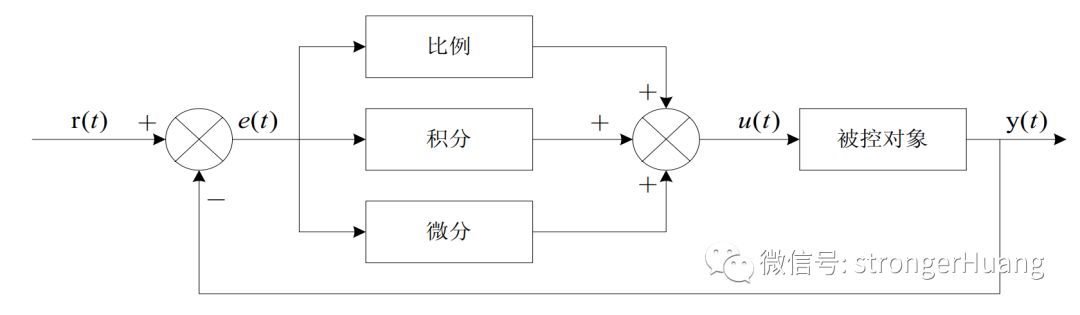
该系统由模拟 PID 控制器和被控对象组成。
上面框图中, r(t) 是给定值, y(t) 是系统的实际输出值,给定值与实际输出值构成控制偏差e(t) = r(t) − y(t).
e(t)作为 PID 控制的输入,u(t)作为 PID 控制器的输出和被控对象的输入。 所以模拟 PID 控制器的控制规律为:
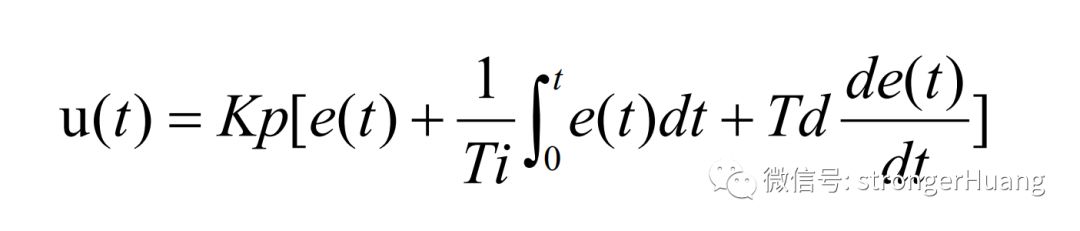
三个重要的参数:
Kp:控制器的比例系数.
Ti:控制器的积分时间,也称积分系数.
Td:控制器的微分时间,也称微分系数.
1、P - 比例部分
比例环节的作用是对偏差瞬间作出反应。偏差一旦产生控制器立即产生控制作用, 使控制量向减少偏差的方向变化。 控制作用的强弱取决于比例系数Kp, 比例系数Kp越大,控制作用越强, 则过渡过程越快, 控制过程的静态偏差也就越小; 但是Kp越大,也越容易产生振荡, 破坏系统的稳定性。 故而, 比例系数Kp选择必须恰当, 才能过渡时间少, 静差小而又稳定的效果。
2、I - 积分部分
从积分部分的数学表达式可以知道, 只要存在偏差, 则它的控制作用就不断的增加; 只有在偏差e(t)=0时, 它的积分才能是一个常数,控制作用才是一个不会增加的常数。 可见,积分部分可以消除系统的偏差。
积分环节的调节作用虽然会消除静态误差,但也会降低系统的响应速度,增加系统的超调量。积分常数Ti越大,积分的积累作用越弱,这时系统在过渡时不会产生振荡; 但是增大积分常数Ti会减慢静态误差的消除过程,消除偏差所需的时间也较长, 但可以减少超调量,提高系统的稳定性。
当 Ti 较小时, 则积分的作用较强,这时系统过渡时间中有可能产生振荡,不过消除偏差所需的时间较短。所以必须根据实际控制的具体要求来确定Ti 。
3、D - 微分部分
实际的控制系统除了希望消除静态误差外,还要求加快调节过程。在偏差出现的瞬间,或在偏差变化的瞬间, 不但要对偏差量做出立即响应(比例环节的作用), 而且要根据偏差的变化趋势预先给出适当的纠正。为了实现这一作用,可在 PI 控制器的基础上加入微分环节,形成 PID 控制器。
微分环节的作用使阻止偏差的变化。它是根据偏差的变化趋势(变化速度)进行控制。偏差变化的越快,微分控制器的输出就越大,并能在偏差值变大之前进行修正。微分作用的引入, 将有助于减小超调量, 克服振荡, 使系统趋于稳定, 特别对髙阶系统非常有利, 它加快了系统的跟踪速度。但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分, 或在微分起作用之前先对输入信号进行滤波。
ⅢPID算法代码
PID 控制算法可以分为位置式 PID和增量式 PID控制算法。
两者的区别:
(1)位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前拍和前两拍的误差有关,因此位置式PID控制的累积误差相对更大;
(2)增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
(3)由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,因此对系统影响较大。
下面给出公式直接体现的C语言源代码(请结合项目修改源代码):
1.位置式PID

typedef struct { float Kp; //比例系数Proportional float Ki; //积分系数Integral float Kd; //微分系数Derivative float Ek; //当前误差 float Ek1; //前一次误差 e(k-1) float Ek2; //再前一次误差 e(k-2) float LocSum; //累计积分位置 }PID_LocTypeDef; /************************************************函数名称 : PID_Loc功 能 : PID位置(Location)计算参 数 : SetValue ------ 设置值(期望值) ActualValue --- 实际值(反馈值) PID ----------- PID数据结构返 回 值 : PIDLoc -------- PID位置作 者 : strongerHuang*************************************************/ float PID_Loc(float SetValue, float ActualValue, PID_LocTypeDef *PID){ float PIDLoc; //位置 PID->Ek = SetValue - ActualValue; PID->LocSum += PID->Ek; //累计误差 PIDLoc = PID->Kp * PID->Ek + (PID->Ki * PID->LocSum) + PID->Kd * (PID->Ek1 - PID->Ek); PID->Ek1 = PID->Ek; return PIDLoc;}
2.增量式PID

typedef struct { float Kp; //比例系数Proportional float Ki; //积分系数Integral float Kd; //微分系数Derivative float Ek; //当前误差 float Ek1; //前一次误差 e(k-1) float Ek2; //再前一次误差 e(k-2) }PID_IncTypeDef; /************************************************函数名称 : PID_Inc功 能 : PID增量(Increment)计算参 数 : SetValue ------ 设置值(期望值) ActualValue --- 实际值(反馈值) PID ----------- PID数据结构返 回 值 : PIDInc -------- 本次PID增量(+/-)作 者 : strongerHuang*************************************************/ float PID_Inc(float SetValue, float ActualValue, PID_IncTypeDef *PID){ float PIDInc; //增量 PID->Ek = SetValue - ActualValue; PIDInc = (PID->Kp * PID->Ek) - (PID->Ki * PID->Ek1) + (PID->Kd * PID->Ek2); PID->Ek2 = PID->Ek1; PID->Ek1 = PID->Ek; return PIDInc;}
-
电机
+关注
关注
145文章
9739浏览量
154985 -
PID算法
+关注
关注
2文章
172浏览量
25879 -
Integrate
+关注
关注
0文章
8浏览量
9142
发布评论请先 登录
幻尔miniBalan智能平衡小车搭载PID、LQR等多维算法,融合多模态AI大模型

PID与自动增益对比分析

C语言的PID算法
C语言实现PID算法介绍
C语言增量式PID的通用算法
CW32L012的PID温度控制——算法基础
怎样理解变频器内置PID控制参数的含义
PID调参实用方法
明晚!基于RT-Thread 的 PID 控制实践,从驱动到算法到监控,一次学会!| 问学直播




评论