 受海葵影响的机器人抓取器更简单灵巧
受海葵影响的机器人抓取器更简单灵巧
据外媒报道,海葵本质上是一种软体动物,它能吞噬各种猎物。针对这种海洋动物,中国科学家现在将这一概念以机器人抓取器的形式进行了复制,并且这种抓握器可能会比常规机械手指模式操作起来更简单、也更灵巧。据悉,该原型设备由西南科技大学和清华大学的研究人员开发。
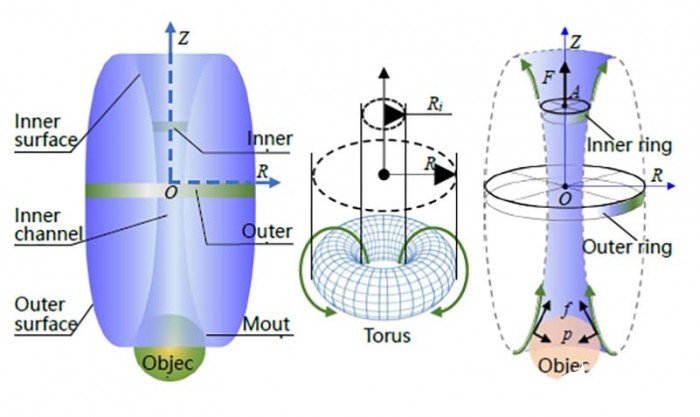
这种被称为仿生环的设备大部分为液体填充的圆柱形橡胶气囊。从本质上来看,它就像一个厚厚的垂直方向的套筒,有向内和向外的外皮,液体则被在这些皮层之间的空间里--由环面形成的圆柱体的内部在两端都是敞口的,而没有填充液体。
也就是说,环被连接到环面的内部皮肤上。当环面的敞口底部被放置在一个物体周围时,一个连接到环上的杆被用来向上拉动它。这样环就会把内部的皮肤向上拉从而让环面底部的外部皮肤向内滚动。此时,皮肤就会起皱、变胖并温柔地从四面抓住物体。
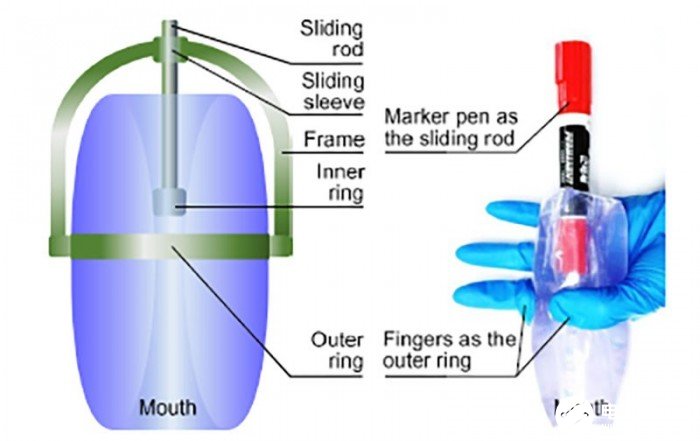
仿生环面原型(右侧)以及计划生产的模型示意图
这样的过程可以一直继续到物体被完全“吞噬”之后。当物体被释放时,内环会向下推从而让皮肤回滚。
根据科学家们的说法,这种设备的量产版应该会更便宜、更容易制造且应该能抓取各种尺寸、形状、重量和材料的物品。
另外,它还将可能在狭窄的空间或高压的海底环境下工作良好,在那里传统抓握器的使用可能会受到阻碍。此外,它甚至还有可能制造出纳米级的环面,从而能够抓住并释放单个细胞。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28483浏览量
207440
发布评论请先 登录
相关推荐
兆威机电发布机器人灵巧手重磅新品!单板控制,17个自由度,寿命大于10年
是机器人灵巧手,是人形机器人上的关键零部件。 目前国内有多家企业已经具备了相关核心技术与产业化能力,近期,兆威机电更是展出了自己的机器人灵巧
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
的局限性以及衡量大模型的关键指标。阅读了该部分后,我感受到了一种前所未有的震撼,这种震撼不仅来源于技术本身的先进性,更来源于它对传统机器人控制方式的颠覆。
传统机器人的局限性与大模型的变革
传统的
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
感谢
感谢电子发烧友网社区给予《具身智能机器人系统》试读机会。在这知识的盛宴中,我感受到社区的关怀与支持。定不负期望,认真研读,分享所学,回馈社区。
一、本书大纲
《具身智能机器人系统》是一本
发表于 12-28 21:12
虹科携手Seed Robotics,开启机器人灵巧手合作新篇章
近日,虹科与SeedRobotics正式建立合作伙伴关系,双方将在机器人灵巧手领域展开深入合作,共同推动人工智能、神经科学、心理学和认知科学等领域的创新研究与应用发展。此次合作,虹科

灵巧手成为机器人竞争下半场,但空心杯电机要失宠了?
)细节时也特别谈到了灵巧手。他表示,下一代Optimus的手部将有22个自由度,前一代版本拥有11个自由度,“它看起来非常像人类的手,可以弹钢琴,甚至可以弹吉他。” 从10+自由度到20+自由度,是机器人灵巧手下一步升级的主
智能移动机器人
富唯智能移动机器人分为复合机器人和转运机器人,搭载ICD核心控制器,实现一体化控制,最快可实现15分钟现场机器人的快速部署,无缝对接产线,配

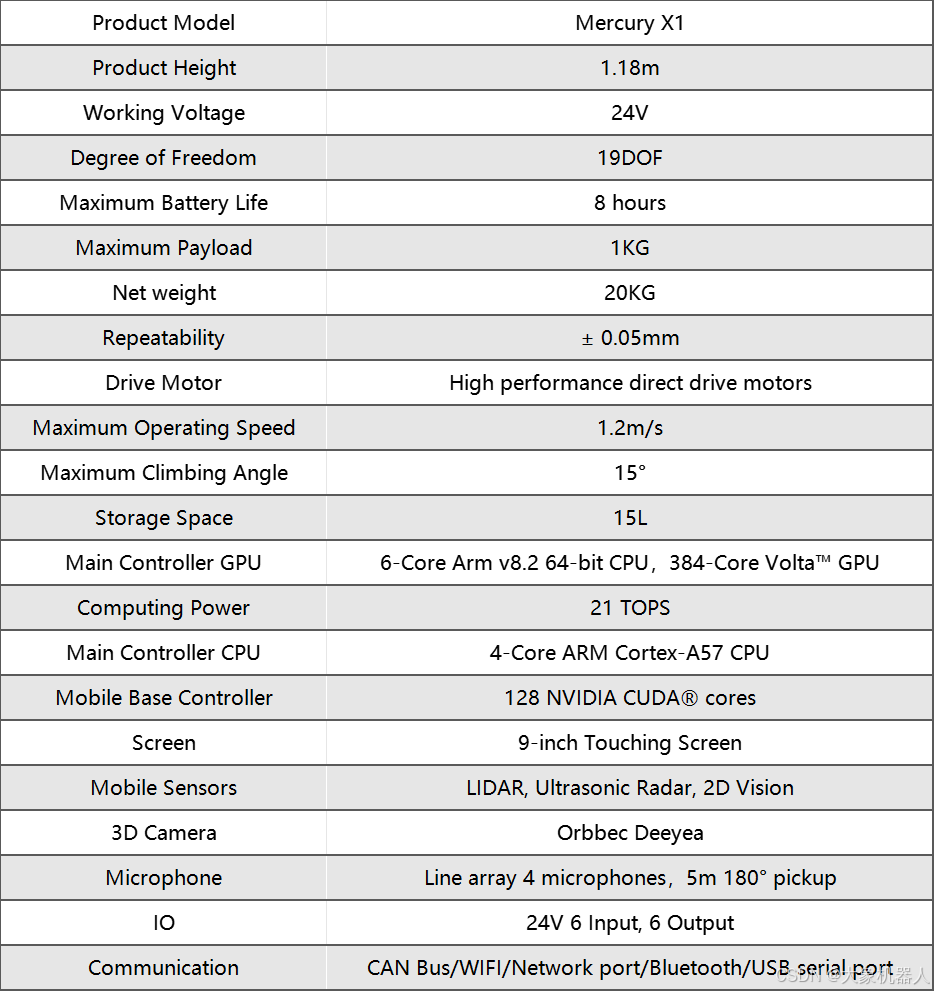
水星Mercury X1轮式人形机器人结合openc算法&STag标记码视觉系统实现精确抓取!
本案例展示了如何利用视觉系统提升机械臂的抓取精度,成功实现了人形机器人的双臂抓取不在局限于单臂抓取。 引言 如今市面上已经有了许多不同类型的人形机器
堪称地表最强“打工人”,人形机器人Figure02领衔灵巧手进化
人形机器人全身装备6个RGB摄像头,分别位于头部、胸前和后背,通过其 AI 驱动的视觉系统感知和理解物理世界。 灵巧手方面,F

Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
码垛机器人的组成和工作原理
几个部分组成: 1、机身:码垛机器人的机身通常由机械臂、底座、控制系统等部件组成,用于支撑和移动物品。 2、抓取机构:码垛机器人的抓取机构通常由夹爪、电磁吸盘等组成,用于夹取和移动
使用NVIDIA Isaac Manipulator生成抓取姿势和机器人运动
NVIDIA 宣布与 Intrinsic.ai 就工业机器人任务的基础技能模型学习展开合作。


富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
富唯智能移动机器人是一款拥有自主导航能力和物料转移抓取功能的智能机器人,采用先进的无线通信技术和高精度传感器,能够实现自主导航和避障,完成生产线上的物料转运任务,并与其他设备实现无缝对





 工商网监
工商网监
评论