 如何提高末制导雷达的测角精度
如何提高末制导雷达的测角精度

毫米波技术炙手可热,对于毫米波,小编也从带来诸多介绍,如5G毫米波、毫米波雷达等。但对于毫米波末制导雷达频域高分辨测角,小编却未曾讲解。因此,本文中将对毫米波此部分相关内容予以介绍。
0 引 言
精确制导技术是精确制导武器的关键技术,其重点在于研究确保寻的武器在复杂战场环境中命中目标乃至命中目标要害部位的寻的末制导技术。随着导弹寻的精确制导技术的发展,当雷达寻的器接近目标时,目标角闪烁已成为微波/毫米波雷达寻的器跟踪误差的主要来源,特别是当跟踪大的扩展目标时,目标角闪烁已成为提高末制导雷达精度的主要障碍。因此,抑制角闪烁,提高末制导雷达的测角精度是末制导雷达的一项关键技术。
经典的抑制角闪烁常用的方法是根据不同的雷达体制和应用背景,在不同的空间、频率和极化方式上对目标的后向散射回波进行分集接收和滤波处理。近年来,随着宽带雷达的发展和应用,基于距离高分辨距离像的单脉冲测角技术在抑制角闪烁方面具有较大的潜力和应用前景。本文提出的基于频域高分辨的测角算法应用于毫米波PD体制末制导雷达,是在系统多普勒分辨率满足一定的条件下,对目标回波进行频域高分辨成像,在和通道中实现目标散射中心频域单元的检测,对检测出的频域单元分别求出相应的方位角和俯仰角,经过一定的滤波处理,得到目标的径向几何中心的空间角度。仿真结果表明该频域高分辨测角技术可以有效提高末制导雷达的测角精度。
1 频域高分辨原理
当导弹与目标存在相对径向运动时,产生多普勒效应。对于主动末制导雷达,点目标回波的多普勒频率为:
式中:Vr(t)为弹目相对径向速度;λ为发射信号的波长。目标的不同部位与导弹的相对速度是不一样的,不同部位对应的回波多普勒频率也不同。对于毫米波雷达而言,其目标特性处于光学区,由于目标的尺寸远大于雷达发射信号的波长,目标可以看成是由多个散射中心组成的扩展目标。当导引头的视线与目标之间存在夹角时,扩展目标不同部位散射中心的速度方向与雷达视线方向不同,进而使得各个散射中心的多普勒频率也存在差异。如果雷达系统的频域分辨率满足要求,就可以分辨出体目标的各个强散射点的多普勒频率,则在频域上可以得到体目标上各个散射点的多普勒频率信息,从而获得频域高分辨一维像。
2 频域高分辨测角算法
2.1 振幅和差单脉冲测角原理
单脉冲雷达属于同时波瓣法测角。雷达天线在一个角平面内有两个部分重叠的波束,振幅和差单脉冲雷达取得角误差信号的基本方法是这两个波束同时收到的信号进行和、差波束处理,分别得到和信号、差信号,其中差信号就是该角平面内的误差信号。
以方位平面为例,假定两个波束的方向性函数完全相同,设为F(θ),两波束收到的信号电压振幅分别为E1,E2,两波束各自相对天线轴线的偏角为δ,则对于偏离天线轴线θ角方向的目标,其和信号振幅为:
其中:F2∑(θ)为发射和波束方向性函数,而F(δ一θ)+F(δ+θ)为接收和波束方向性函数,它与发射和波束方向性函数完全相同;A为比例系数。
差信号的振幅为:
其中:F△=F(δ-θ)一F(δ+θ)为接收差波束方向性函数。
假定目标的误差角为ε,则差信号振幅可表示为:
由于ε比较小,对F△(ε)做泰勒级数可表示为F′△(0)ε,那么:
所以,在一定的误差角范围内,差信号的振幅大小与误差角ε成正比。差信号的相位表明目标偏离天线轴线的方向,所以误差角可以表示为:
其中,当差信号与和信号同相时,ψ取O,反之取π。
2.2 频域高分辨测角算法
PD雷达有三个回波接收通道,分别为和通道、方位通道和俯仰通道,记为E,△f,△y,对三个通道分别作FFT处理,获得三通道的频域高分辨一维像。对和通道一维像进行目标检测,可以获得强散射点的多普勒位置信息,然后根据单脉冲偏轴测角原理,可得到各散射点的方位角误差εfi和俯仰角误差εyi:
对各散射点的角误差进行滤波处理,可得到目标几何中心的角误差,即:
其中,ai,βi为加权系数。
3 仿真实验
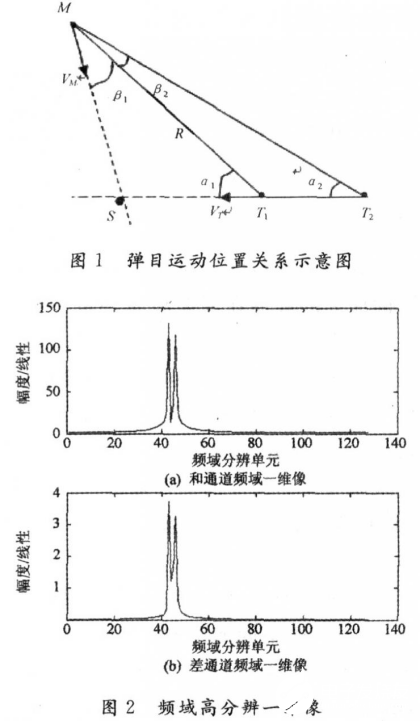
为了验证算法的有效性,进行仿真实验。导弹和目标的位置关系如图1所示。导弹运动速度VM为450 m/s,目标的运动速度VT为1 000 m/s。α1为30°,目标长度为20 m,取头、尾两个散射中心,则频域高分辨一维像如图2所示,其中弹目距离为150 m时,频率分辨率为100 Hz。
为了验证频域高分辨测角的效果,图3、图4分别给出常规单脉冲测角和不同频率分辨率下的测角结果。其中测角结果用归一化的线偏差来表示。可以看出常规单脉冲测角误差比较大。分辨率为800 Hz,400 Hz和100Hz的测角结果如图4所示。可以看出,测角精度大大提高,并且分辨率越高,测角精度越高。

-
雷达
+关注
关注
52文章
3427浏览量
124715 -
毫米波
+关注
关注
21文章
2065浏览量
68061
发布评论请先 登录

DZM020BB零偏置肖特基二极管检波器
固态激光雷达参数以及避障视频
纳雷科技推出无人机雷达高精度旋转平台
提高步进伺服系统精度的措施

关于步进电机脉冲和步距角相关的问题

AWR2188:汽车雷达应用的理想单芯片解决方案
小体积石英加速度计:让导航制导更“轻”更精准
雷达技术原理与典型应用:24GHz毫米波雷达及5.8GHz微波雷达分析

大疆发布首款兼具长测程与高精度航测激光雷达
椭偏仪在精密薄膜中的应用:基于单驱动变角结构的高重复性精度控制系统

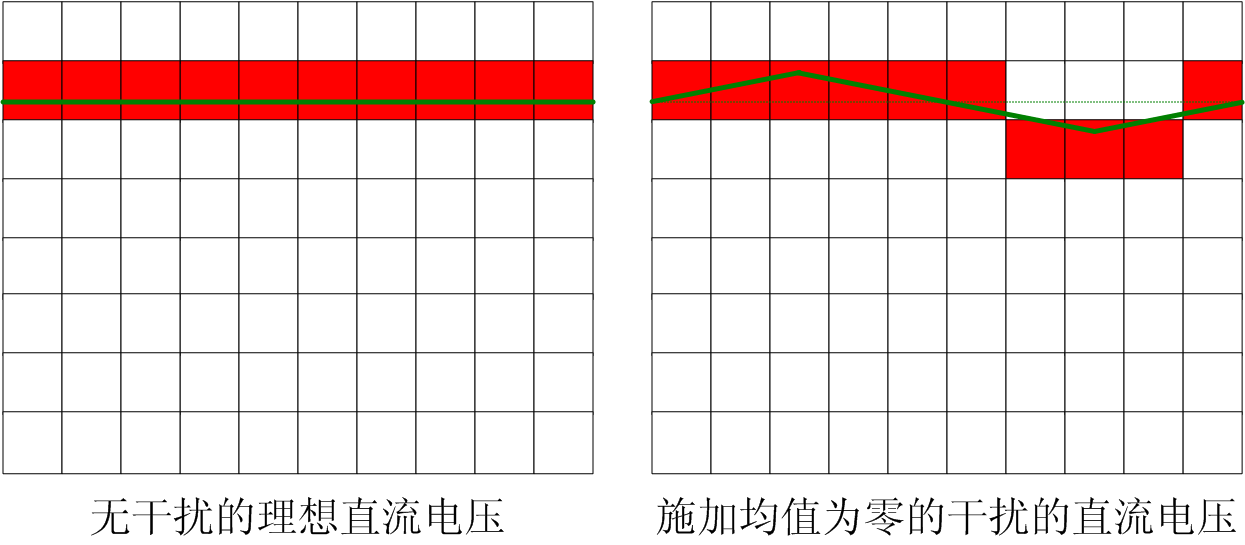
干扰可以提高测量精度,是真的吗?
雷达天线曲面轮廓度高精度检测方案

滚珠螺杆的预压技术是如何提高精度的?



评论