 基于激光传感器的焊缝自动跟踪解决方案
基于激光传感器的焊缝自动跟踪解决方案
(文章来源:创想跟踪)
针对现有部分焊缝自动跟踪方法依靠单一反馈来控制焊枪产生滞后控制,影响跟踪的精度这一不足问题,北京创想智控提供一种基于激光传感器的焊缝跟踪方法,在传感器检测位置超前焊枪的情况下,它可以计算出焊枪实际焊缝偏差,同时可以实时纠正下一步焊枪的走向,大大提高焊缝跟踪精度和效果。
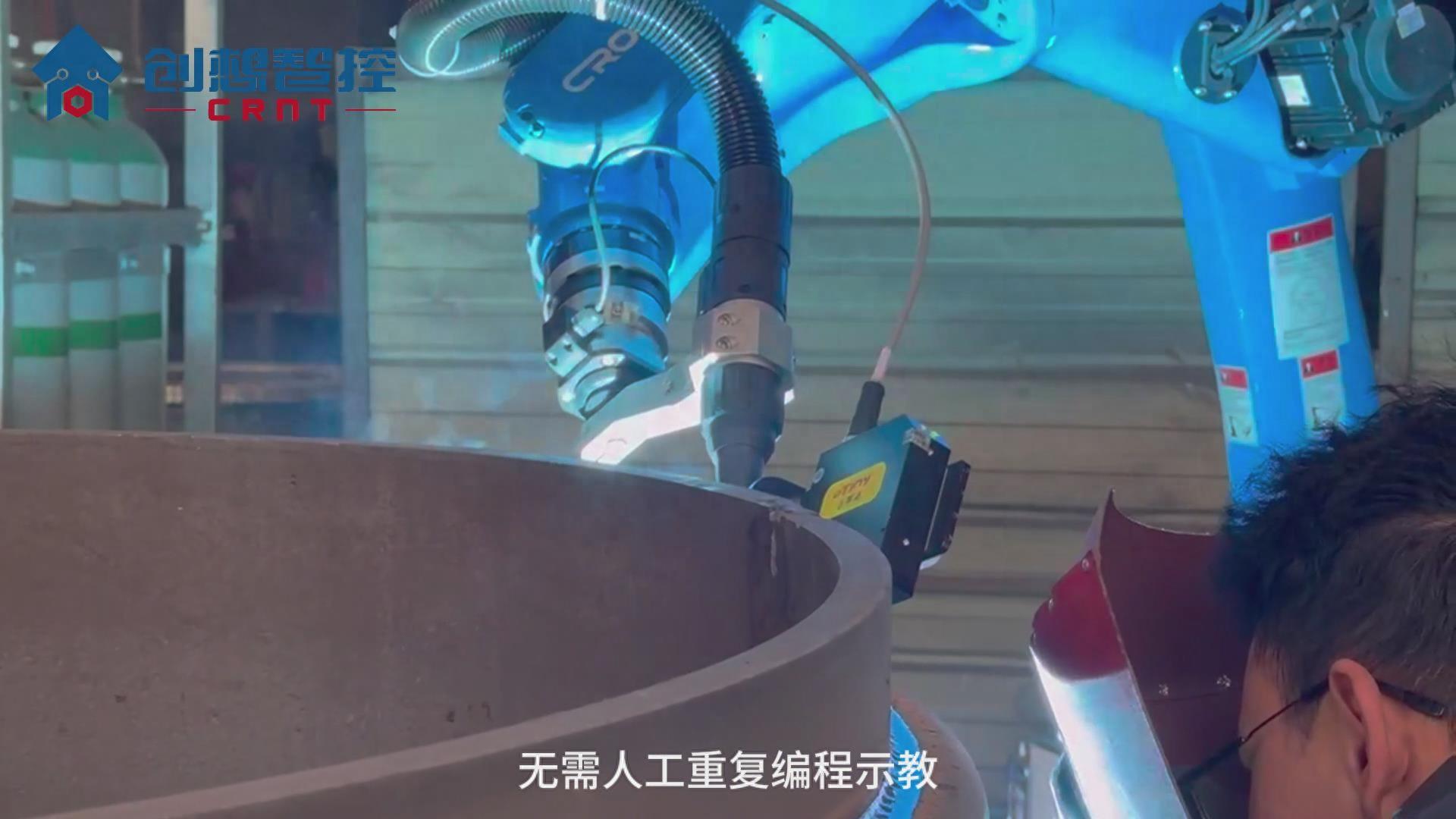
焊缝跟踪是实现焊接自动化的关键。目前激光传感器是最有发展前景的焊缝跟踪传感方式之一,倍受人们的青睐,并逐步在焊接生产中推广应用。
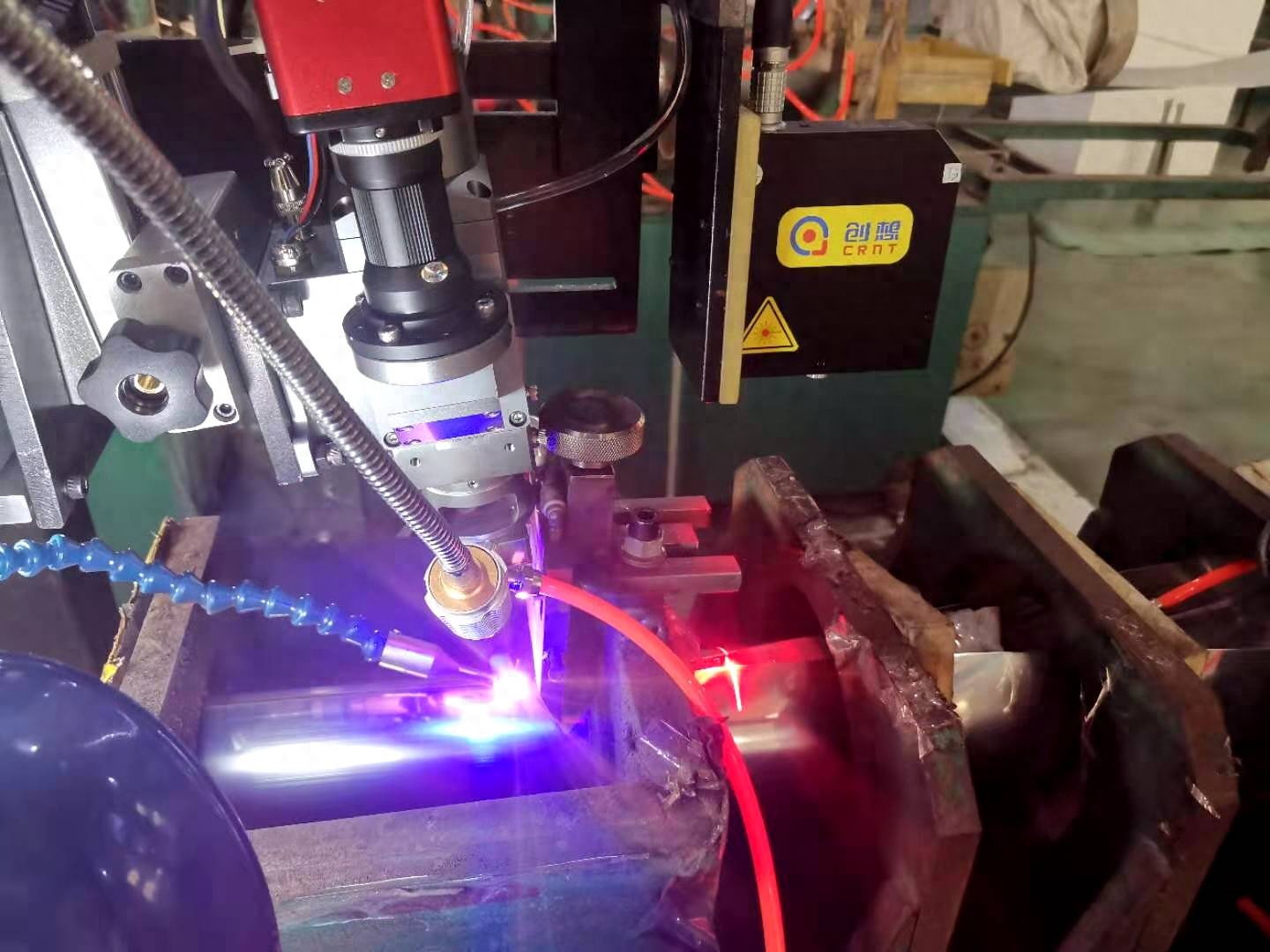
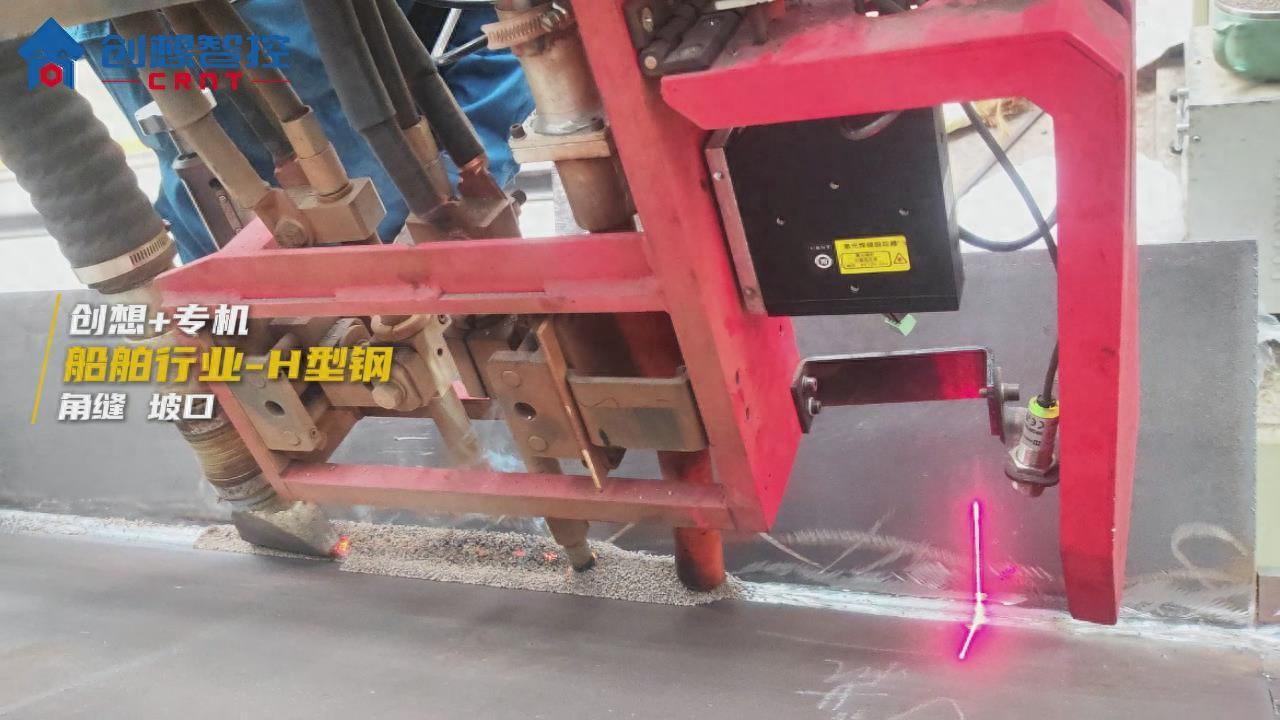
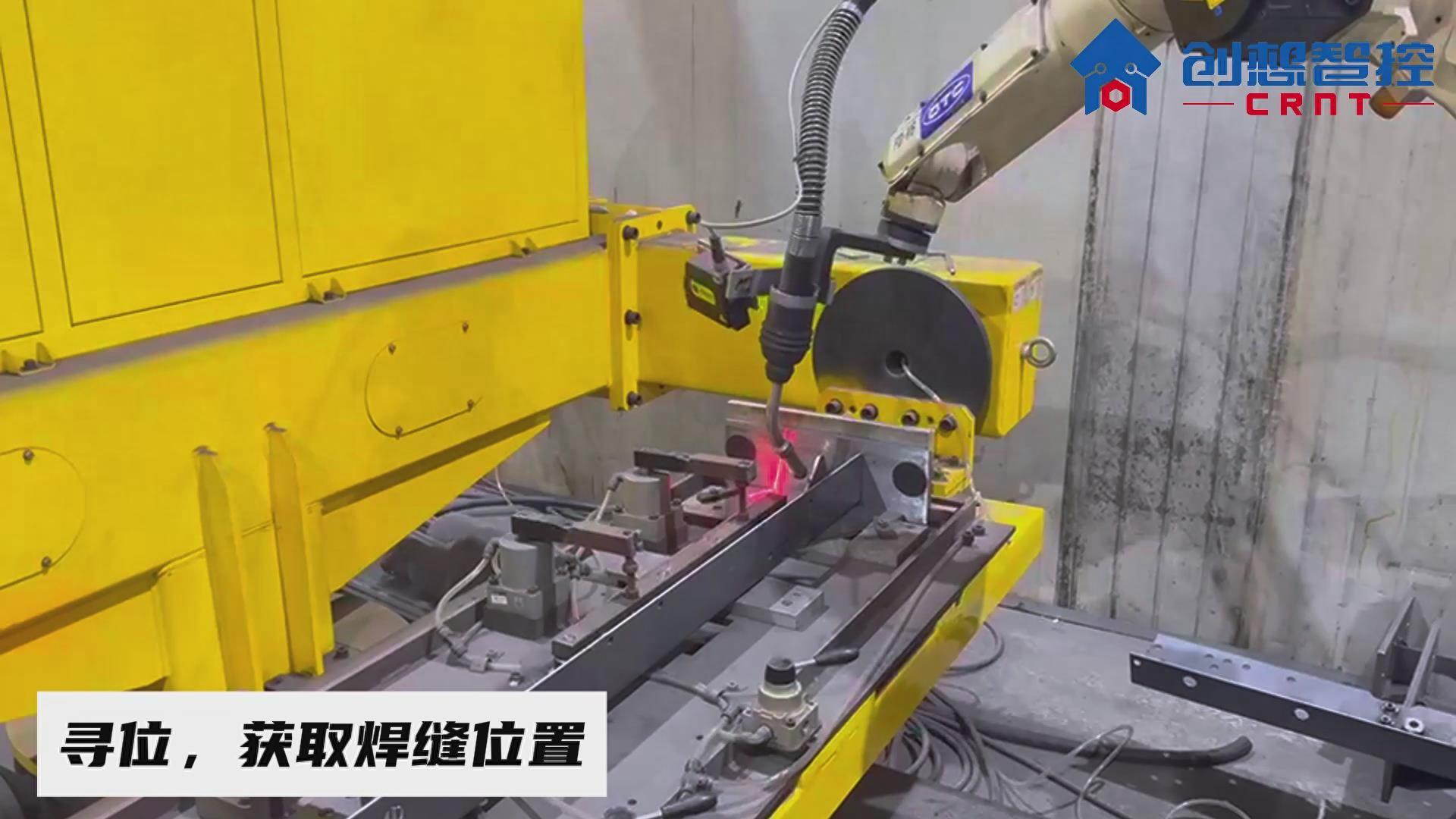
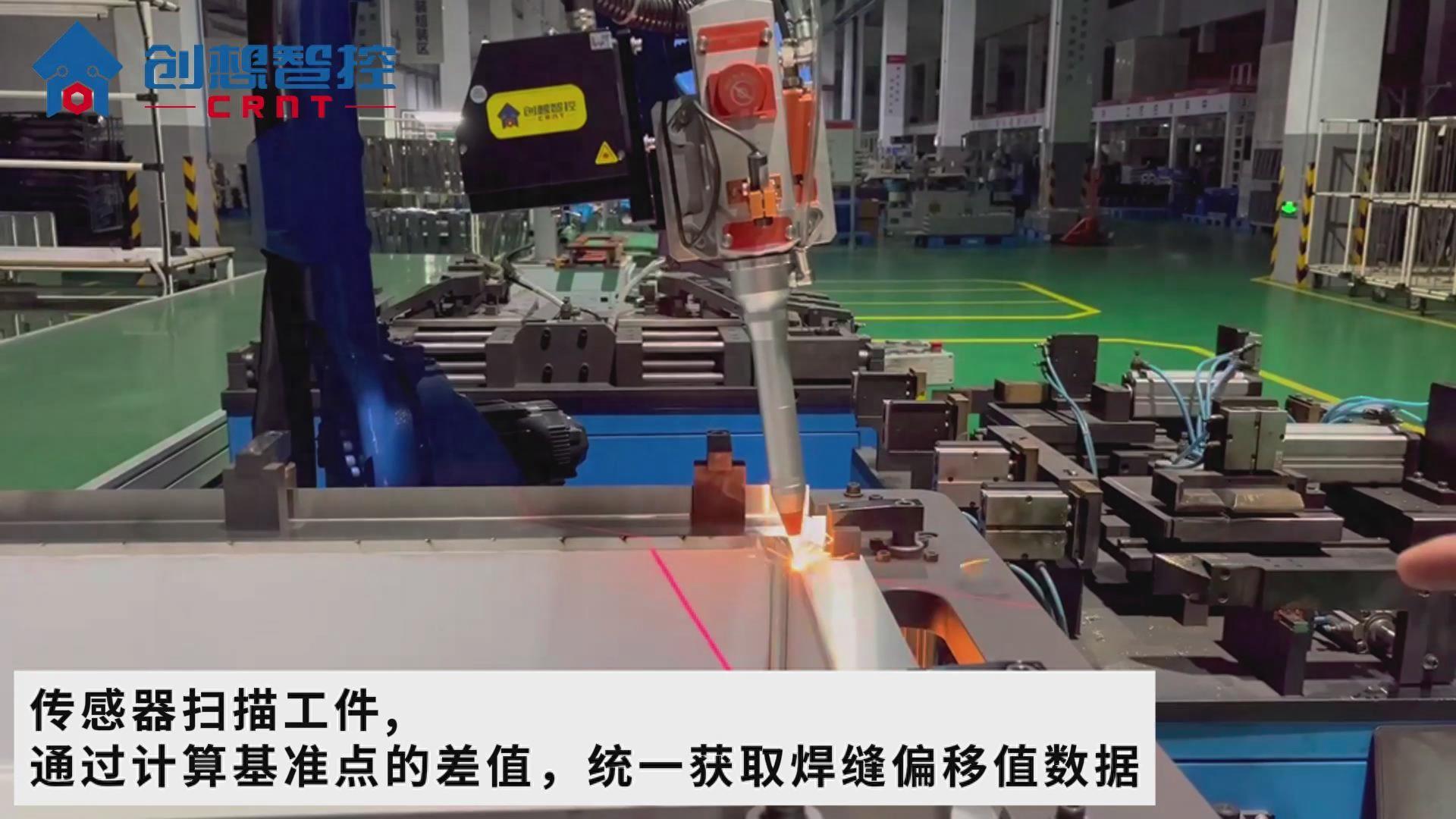
激光传感器器与焊枪跟踪机构固定连接在一起,传感器安装在焊枪的前方,用于检测焊缝位置信息。传感器将图像信息传送给图像采集系统,并经图像处理获取焊缝位置信息,将焊枪位置与该焊缝位置作比较,计算出焊枪偏离焊缝的偏差,即焊缝偏差,利用这一偏差作为反馈给控制器来调整跟踪机构,使焊枪始终对准焊缝,实现焊缝跟踪的目的。
基于激光传感器的焊缝自动跟踪系统,包括计算机、焊枪、激光传感器、图像采集单元、运动控制单元和驱动单元,激光传感器、图像采集单元、运动控制单元和驱动单元安装在焊枪的上方,图像采集单元和运动控制单元连接计算机,焊枪由驱动单元带动;焊枪前方设置有半导体激光器。
其工作原理是,由半导体激光器发出一字线激光条纹斜射到焊枪前方的焊件上,经激光传感器摄取并传送给图像采集单元,图像采集单元将采集到的图像信息存储在计算机内存,如果焊缝为一直线,则采集到的焊缝图像中激光条纹为一折线;如果焊缝为一曲线,由于焊缝坡口处高度不一致,因此采集到的焊缝图像中激光条纹将为一折线(折线反映了焊缝坡口信息),该焊缝图像经计算机的图像处理及识别算法,检测出焊缝中心位置,计算出位置偏差,焊缝自动跟踪算法依据偏差、传动机构特性计算出焊枪纠偏量,由运动控制单元产生对应控制信号,经驱动器单元带动焊枪运动,使焊枪对准焊缝。
(责任编辑:fqj)
-
传感器
+关注
关注
2552文章
51253浏览量
754962 -
自动跟踪
+关注
关注
0文章
21浏览量
9365
发布评论请先 登录
相关推荐
激光焊缝跟踪器与传统焊缝检测方法的对比

深入解析激光焊缝跟踪器的工作原理与应用优势
创想智控激光焊缝跟踪系统协同焊接专机自动化焊接灭火器罐的应用

创想智控激光焊缝跟踪传感器在海底抽淤管道全自动焊接的应用
创想智控激光焊缝跟踪器协同专机在风机高精度自动焊接的应用

创想智控激光焊缝跟踪器在医疗搅拌罐反应釜自动焊接的应用


创想智控激光焊缝跟踪传感器在汽车配件导风罩自动化焊接的应用
创想智控焊缝跟踪传感器在欧式箱变底座拼接焊缝自动焊接的应用

创想智控激光焊缝跟踪传感器在厨房水槽智能焊接的应用

创想智控激光焊缝跟踪传感器在钢瓶自动化焊接的应用






 工商网监
工商网监
评论