 波士顿动力机器人的动态平衡专利揭秘
波士顿动力机器人的动态平衡专利揭秘
波士顿动力通过操作机器人的四肢部位让其本身在表面上处于动态平衡,通过机器人可以动态的控制腿,使得反作用力允许机器人保持支撑整个身体的平衡,更加接近于真人的实际动作!
集微网消息,近日,一则波士顿动力机器人的对比视频在微博上流传。该视频画面分为两部分,左边是10年前波士顿动力机器人训练的画面,右边是10年后波士顿动力机器人训练的画面。
10年前的波士顿动力机器人还需要通过悬挂绳索来在传送带上行走,而且还步履蹒跚。10年后的波士顿机器人已经不需要辅助设备就可以轻松自如地完成各种即使是普通人也难以完成的精细活动和大肢体动作,无论是下腰、打滚、倒立乃至前空翻、后空翻都非常的稳妥。
波士顿动力在机器人领域取得了非凡的成就,而可以使得机器人如此灵活甚至在某些程度上超越了大部分普通人的原因,离不开波士顿动力为机器人设计的动态平衡系统,尤其是对于二足机器人而言,良好的动态平衡系统更是为机器人的整体可操作性发挥了重要的作用!
就在17年12月6日,波士顿动力申请了一项名为“使用动态平衡在有腿机器人上的整体操纵”的发明专利(申请号:201780075045.7),申请人为波士顿动力公司。
根据目前公开的专利资料,让我们一起来看看这项动态平衡专利吧。
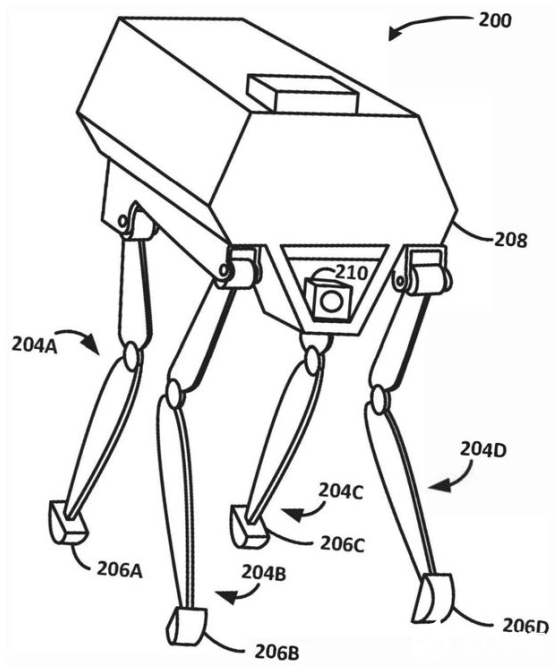
如上图,首先要介绍的是一种四足机器人结构,顾名思义,从示意图中可以看到它有四条仿生足206A、206B、206C及206D,208部位为一个可以用来承载物体的载物台,因此可以推断该四足机器人应该是用于搬运货物。
四条“腿”使得机器人可以相对于其环境运动,并且可以拥有一定的自由运动能力,具体而言,“腿”可以使得机器人根据不同步态的力学特点以各种速度行进,例如通过平地、斜坡、坑洼地等多种不同的环境状态,同时可以采用不同的速度例如缓慢、平稳、加速等多种不同的形态。
除了引人注目的四条“大长腿”以外,该机器人还包括机械部件110、传感器112、电源115、电部件116以及控制系统118,这些组件只要是用于机器人识别周围的环境,例如通过图像传感器、摄像头、LIDAR或者红外传感器等,而控制系统将通过控制电机来控制机器人的运动。我们知道,机器人有一个很重要的问题就是保持其运动稳定性,因此就需要利用控制系统中的控制算法来对于机器人的运动进行有效的控制。
由于四足机器人本身在不运动时通过四个支点就可以保持平稳,而二足机器人要完成稳定的行走、运动就相对困难许多。
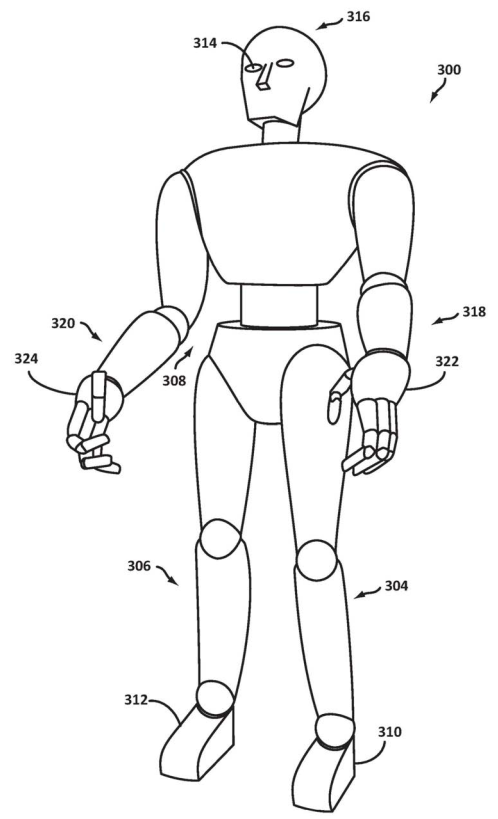
如上图为一种两足机器人的示意结构,和四足机器人较为类似的是,二足机器人也具有机械部件110、传感器112、电源114、电部位116以及控制系统等。
不过二足机器人只有和本体连接的两条“腿”304和306,每一条腿可以包括多个构件,其通过关节连接且可以通过这些关节部位进行灵活的运动。每一条腿也可以包括各自的脚310和312,拥有这些类似于人体结构的部位,双足机器人就可以完成行走甚至是跑步等动作。同样这些动作离不开视觉传感器例如摄像头、红外传感器、物体传感器以及距离传感器等,同时在精准而鲁棒的控制系统下才能够完成这些动作。
在不同的场景下,二足机器人要比四足机器人能够发挥更大的作用,具体而言表现在能够适应更多的不同的环境场合,例如爬楼梯、面对复杂的地形,此时四足机器人就难以发挥其优势而变得寸步难行,而二足机器人则可以在这些方面模拟人的运动从而轻松的面对这些场景。
接下来我们具体来看看二足机器人是如何保持其自身的平衡以及完成运动的吧。
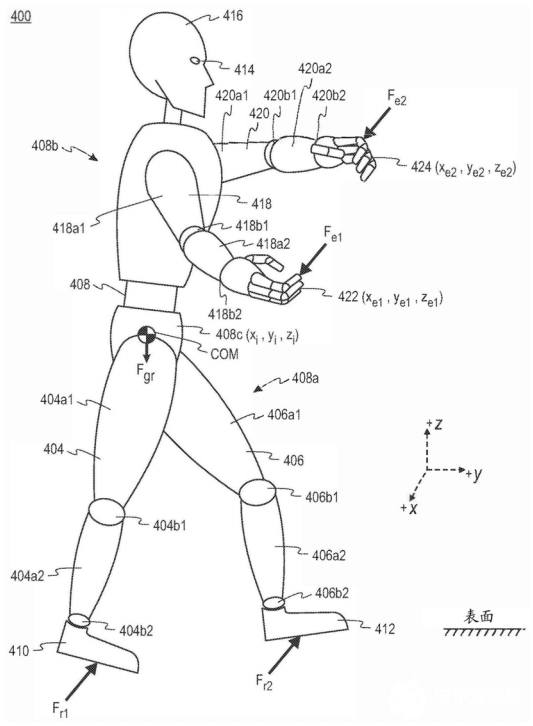
如上图所示为针对整体操作而采用动态平衡的二足机器人,其包括下本体部分408a、上本体部分408b和中间本体部分408c,下本体部分和上本体部分通过中间本体部分相连接。下本体部分包括从中间本体部分大致向下延伸到表面的两条腿404和406,腿包括构件404a1-a2、406a1-a2和关节404b1-b2、406b1-b2。
上本体部分包括各自的臂膀418、420的端部上的末端结构422、424,臂可以从上本体部分向外延伸至末端结构,每一个臂也同样包括多个关节以及可以通过这些关节进行多自由度的运动。
而实现二足机器人的整体平衡则需要下本体控制系统、上本体控制系统和主控系统三个系统之间的协调,控制系统从每一个传感器中收集传感器数据,通过这些数据来分析机器人目前所处运动状态以及将要进行何种操作,例如抬起左脚或者迈出右腿。
而为了实现用于脚的期望位置和用力程度,下本体控制系统将通过反向运动解算器来确定各自腿部的取向和相应关节位置,这里的反向运动解算器,是指使用机器人的运动学方程来确定腿部或者上肢的参数,以便于可以确定落脚点以及手臂的精准运动。同时为了实现落脚的精准,上本体控制系统也可以采用反向运动解算器以确定两条臂膀的构件的取向和关节的运动位置。
最后,我们来看看控制二足机器人保持平衡的整体方法。
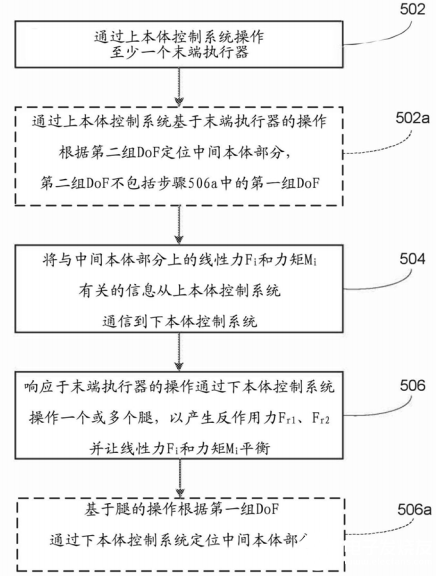
如上图所示为针对整体操作而采用了动态平衡的操作机器人的方法,首先,上本体控制系统417b操作末端部位422、424,末端部位基于通过上本体控制系统进行的操作而经历末端部位受力Fe1、Fe2,中间本体部分408c基于末端部位受力经历第一中间本体线性力fi。
其次,上本体控制系统将与第一中间本体线性力fi和第一中间本体力矩Mi有关的信息通信到下本体控制系统,下本体控制系统响应于可动末端部位的操作而操作腿部的运动。
最后,主控制器417c可确定如果上本体控制系统试图让末端部位运动到期望位置时,是否可通过脚的当前位置保持平衡,如平衡不能被保持,则主控制器可对下本体控制系统发出信号,以让脚运动到新的位置,以便于达到系统的整体平衡。
以上就是波士顿动力的机器人动态平衡操作方法,通过操作机器人的四肢部位让其本身在表面上处于动态平衡,通过机器人可以动态的控制腿,使得反作用力允许机器人保持支撑整个身体的平衡,更加接近于真人的实际动作!
-
机器人
+关注
关注
211文章
28409浏览量
207029 -
波士顿动力
+关注
关注
3文章
176浏览量
13113
发布评论请先 登录
相关推荐
小鹏最新人形机器人!首发自研芯片,模特身材加持,已进厂打螺丝

Atlas转型电驱,纯电+AI正在加速通用人形机器人落地

【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
软通动力与智元机器人携手亮相世界机器人大会

埃斯顿4.5亿增资子公司,加速机器人产业布局
Al大模型机器人
直线电机生产厂家谈人形机器人迎来新奇点

波士顿动力人形机器人Atlas电动版亮相:前沿技术迎来新时代

人形机器人未来面临的挑战与争议
所有操作层都接入AI,Menteebot给人形机器人发展带来新思路
波士顿动力公司推出电动版Atlas机器人,展现卓越灵活性与敏捷性






 工商网监
工商网监
评论