 PID操控的原理和特征说明
PID操控的原理和特征说明
PID即是份额微积分调度,具体你可以参照主动操控课程里有具体介绍!正效果与反效果在温控里即是当正效果时是加热,反效果是制冷操控。
PID操控简介
如今工业主动化水平已变成衡量各行各业现代化水平的一个首要象征。一同,操控理论的翻开也阅历了古典操控理论、现代操控理论和智能操控理论三个期间。智能操控的典型实例是含糊全主动洗衣机等。主动操控体系可分为开环操控体系和闭环操控体系。一个控操控体系包含操控器﹑传感器﹑变送器﹑施行安排﹑输入输出接口。操控器的输出经过输出接口﹑施行安排﹐加到被控体系上﹔操控体系的被控量﹐经过传感器﹐变送器﹐经过输入接口送到操控器。纷歧样的操控体系﹐其传感器﹑变送器﹑施行安排是纷歧样的。比方压力操控体系要选用压力传感器。电加热操控体系的传感器是温度传感器。如今,PID操控及其操控器或智能PID操控器(外表)现已许多,商品已在工程实习中得到了广泛的运用,有林林总总的PID操控器商品,各大公司均开发了具有PID参数自整定功用的智能调度器(intelligentregulator),其间PID操控器参数的主动调整是经过智能化调整或自校对、自习气算法来完毕。有运用PID操控完毕的压力、温度、流量、液位操控器,能完毕PID操控功用的可编程操控器(plc),还有可完毕PID操控的PC体系等等。
1、开环操控体系
开环操控体系(open-loopcontrolsystem)是指被控方针的输出(被操控量)对操控器(controller)的输出没有影响。在这种操控体系中,不依托将被控量反送回来以构成任何闭环回路。
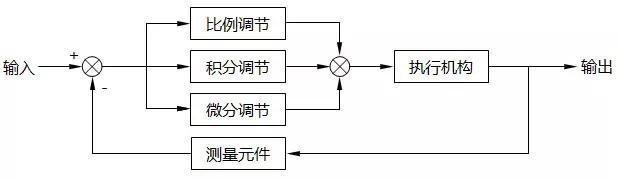
2、闭环操控体系
闭环操控体系(closed-loopcontrolsystem)的特征是体系被控方针的输出(被操控量)会反送回来影响操控器的输出,构成一个或多个闭环。闭环操控体系有正反响和负反响,若反响信号与体系给定值信号相反,则称为负反响(NegativeFeedback),若极性一样,则称为正反响,一般闭环操控体系均选用负反响,又称负反响操控体系。闭环操控体系的比方许多。比方人即是一个具有负反响的闭环操控体系,双眼即是传感器,充任反响,人体体系能经过不断的批改终究作出各种准确的动作。假定没有双眼,就没有了反响回路,也就成了一个开环操控体系。另例,当一台实在的全主动洗衣机具有能接连查看衣物是不是洗净,并在洗净往后能主动堵截电源,它即是一个闭环操控体系。
3、阶跃照料
阶跃照料是指将一个阶跃输入(stepfunction)加到体系上时,体系的输出。稳态过失是指体系的照料进入稳态后﹐体系的希望输出与实习输出之差。操控体系的功用可以用稳、准、快三个字来描绘。稳是指体系的安稳性(stability),一单个系要能正常作业,首要有必要是安稳的,从阶跃照料上看应当是收敛的﹔准是指操控体系的准确性、操控精度,一般用稳态过失来(Steady-stateerror)描绘,它标明体系输出稳态值与希望值之差﹔快是指操控体系照料的活络性,一般用上升时刻来定量描绘。
4、PID操控的原理和特征
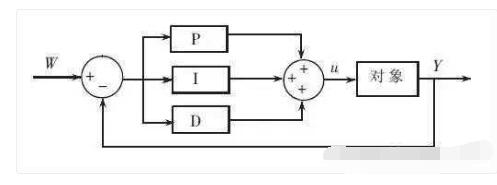
在工程实习中,运用最为广泛的调度器操控规矩为份额、积分、微分操控,简称PID操控,又称PID调度。PID操控器面世至今已有近70年前史,它以其构造简略、安稳性好、作业牢靠、调整便当而变成工业操控的首要技能之一。当被控方针的构造和参数不能彻底把握,或得不到准确的数学模型时,操控理论的其它技能难以选用时,体系操控器的构造和参数有必要依托阅历和现场调试来断定,这时运用PID操控技能最为便当。即当咱们不彻底了解一单个系和被控方针﹐或不能经过有用的丈量方法来取稳当系参数时,最适宜用PID操控技能。PID操控,实习中也有PI和PD操控。PID操控器即是依据体系的过失,运用份额、积分、微分核算出操控量进行操控的。
份额(P)操控
份额操控是一种最简略的操控方法。其操控器的输出与输入过失信号成份额联络。当仅有份额操控时体系输出存在稳态过失(Steady-stateerror)。
积分(I)操控
在积分操控中,操控器的输出与输入过失信号的积分红正比联络。对一个主动操控体系,假定在进入稳态后存在稳态过失,则称这个操控体系是有稳态过失的或简称有差体系(SystemwithSteady-stateError)。为了消除稳态过失,在操控器中有必要引进“积分项”。积分项对过失取决于时刻的积分,跟着时刻的添加,积分项会增大。这么,即使过失很小,积分项也会跟着时刻的添加而加大,它推进操控器的输出增大使稳态过失进一步减小,直到等于零。因而,份额+积分(PI)操控器,可以使体系在进入稳态后无稳态过失。
微分(D)操控
在微分操控中,操控器的输出与输入过失信号的微分(即过失的改动率)成正比联络。主动操控体系在打败过失的调度进程中或许会呈现振动乃至失稳。其要素是因为存在有较大惯性组件(环节)或有滞后(delay)组件,具有按捺过失的效果,其改动老是落后于过失的改动。处理的方法是使按捺过失的效果的改动“超前”,即在过失挨近零时,按捺过失的效果就应当是零。这即是说,在操控器中仅引进“份额”项一般是不行的,份额项的效果仅是拓宽过失的幅值,而如今需求添加的是“微分项”,它能猜想过失改动的趋势,这么,具有份额+微分的操控器,就可以提早使按捺过失的操控效果等于零,乃至为负值,然后避免了被控量的严峻超调。所以对有较大惯性或滞后的被控方针,份额+微分(PD)操控器能改进体系在调度进程中的动态特性。
-
PID
+关注
关注
35文章
1472浏览量
85513
发布评论请先 登录
相关推荐
如何使用Python实现PID控制
如何调节PID参数 PID控制器的调试方法
PID控制器的类型和选择指南
什么是PID控制与传统控制的区别
PID控制的优缺点分析 PID参数调节的常见方法
如何使用PID进行温度控制
PID算法的基本原理介绍
串级pid内环和外环怎么确定
PID控制的原理与作用
位置式PID与增量式PID的区别
什么是PID?PID各个参数有什么作用?





 工商网监
工商网监
评论