 新松机器人的轴孔装配工业机器人系统专利
新松机器人的轴孔装配工业机器人系统专利

新松机器人发明的轴孔装配工业机器人,通过这种工作精度高且接触力可控的轴孔装配工业机器人可以完成精准的轴孔装配任务,而设置在该机器人中的运动计算模块、电机驱动模块以及力控制模块控制着整个机器人的动作,最终完成精准的轴孔装配。
集微网消息,数控加工在制造业已被广泛应用,随着加工零件的复杂度增加和精度的提高,一些精细零件的加工与装配作业依靠普通的数控机床已经不能满足需求。
例如高精度的轴孔装配作业,由于环境中存在诸多不确定性和突发事件,使得装配作业时常发生故障,在常规位置控制下,装配工业机器人装配件之间的微小偏差可能使装配件不能完成装配,导致装配作业失败,甚至造成对装配工件及周边设备的损伤。
生活中常用的技术中,一些方法利用轴孔空间的“碗状约束域”实现了轴孔的装配,一些方法使用了多轴孔装配装置,该装配装置是根据刚性轴孔装配任务的特点,针对弹性多轴孔装配动作而设计的,但是大多采用单一的位置控制模式设计的,而对接触力不能够进行控制,不适用于对接触力要求较为严格的装配作业。
而另外的柔顺性实现轴孔装配技术,利用增大位置环增益完成装配任务,可以实现对孔运动的情况下的轴孔装配作业,但其仍然是靠位置控制来实现轴孔装配,不能够对接触力进行控制,在对装配精度要求较高或刚度较低的工件进行装配作业时,其接触力的不可控性容易造成装配失败或者工件的损伤。
针对这些问题,新松机器人在13年11月14日申请了一项名为“轴孔装配工业机器人系统及其工作方法”的发明专利(申请号:201310578100.8),申请人为沈阳新松机器人自动化股份有限公司。
根据目前公开的专利资料,让我们一起来看看这项轴孔装配机器人吧。
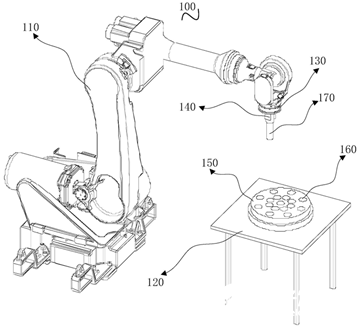
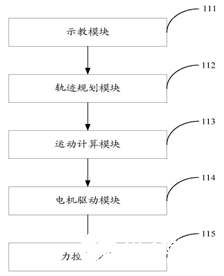
如上图所示为轴孔装配工业机器人系统的结构示意图,这个工业机器人系统主要包括:工业机器人110、轴孔装配平台120、力觉传感器130、夹持装置140、装配工件150、装配孔160及装配轴170,此外该系统还包括示教模块111、轨迹规划模块112、运动计算模块113、电机驱动模块114及力控制模块115,具体的功能模块示意如下图所示。
其中,工业机器人与轴孔装配平台的底座固定在同一基准面上,夹持装置安装于工业机器人的手臂末端,装配工件固定在轴孔装配平台上。力觉传感器安装在手臂末端与夹持装置之间,用于实时测量装配轴与装配孔间接触力。
该工业机器人为六自由度工业机器人,何为六自由度呢?物体在空间具有六个自由度,即沿x、y、z三个直角坐标轴方向的移动自由度和绕这三个坐标轴的转动自由度。因此,要完全确定物体的位置,就必须清楚这六个自由度。拥有六自由度的工业机器人在工作范围内除奇异点外能够自由调节工业机器人手臂末端在笛卡尔坐标系下的三个轴向位置和绕三个坐标轴转动的姿态。
和六自由度相匹配的是,力觉传感器为六维力觉传感器,能够检测笛卡尔坐标系下三个方向的力和绕三个方向的力矩。工业机器人通过示教及轨迹规划生成一系列运动轨迹点,以使夹持装置夹持装配轴运动至装配孔的上方。
运动计算模块将运动轨迹点解析成对应时间点的关节空间下各关节角度,并传送至电机驱动模块,电机驱动模块驱动工业机器人运动并带动夹持装置夹持装配轴运动至装配孔的上方。
如上图为装配机器人系统的工作流程图,该装配机器人系统先根据示教位置按照位置控制模式以速度v运动至子图a状态,然后在接触力和位置同时控制的方式下继续以速度v向下运动直至装配轴与装配孔间接触力达到设定的恒定值f,如图b所示。
然后采用搜孔单元进行搜孔,找到正确的装配孔,但由于装配轴与装配孔的姿态不符可能会出现卡死现象如图c1,为避免出现c1的情况发生,在找到装配孔后装配机器人在接触力和位置同时控制的模式下,实时调整装配轴的位姿,将装配轴与装配孔间的姿态扭矩控制在合理的微小范围内的同时控制装配轴向下运动。
当Z方向接触力突然增大且三个方向的姿态扭矩依然处于合理范围内时,说明装配轴已经插入装配孔的底部,如图c2所示,此时完成装配。
最后我们再来看看轴孔装配工业机器人的工作方法的步骤流程,如下图所示。
首先,工业机器人通过示教及轨迹规划生成一系列运动轨迹点,以使夹持装置夹持装配轴运动至装配孔上方,示教模块控制工业机器人在笛卡尔空间和关节空间下进行点动,直至夹持装置夹持装配轴到达装配孔正上方,并记录关键的示教点。轨迹规划模块将示教点解析成平滑的样条曲线,再将所条曲线按照时间点离散化成运动轨迹点。
其次,运动计算模块将运动轨迹点解析成对应时间点的关节空间下各关节角度,并传送至电机驱动模块,电机驱动模块驱动工业机器人运动并带动夹持装置夹持装配轴运动至装配孔上方。
最后,力控制模块根据接触力及装配轴的位置,控制工业机器人运动使装配轴与装配孔以设定好的接触力进行接触,将装配轴顺利插入至装配孔中。
以上就是新松机器人发明的轴孔装配工业机器人,通过这种工作精度高且接触力可控的轴孔装配工业机器人可以完成精准的轴孔装配任务,而设置在该机器人中的运动计算模块、电机驱动模块以及力控制模块在这个过程中发挥着极其重要的作用,控制着整个机器人的动作,最终才能完成精准的轴孔装配!
-
电机
+关注
关注
145文章
9743浏览量
155008 -
工业机器人
+关注
关注
91文章
3557浏览量
98631
发布评论请先 登录
人形机器人热度狂飙,工业赛道真正落地的是复合机器人!

六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
荣耀机器人散热系统介绍

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
工业机器人TOP1,切入人形机器人赛道,意欲何为?

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点
工业机器人与协作机器人概念不同




评论