 飞行时间传感器的距离确定方法
飞行时间传感器的距离确定方法
飞行时间传感器测量物体穿过介质传播所需的时间。通常,是在发出波脉冲,从对象反射到返回到ToF传感器之间经过的时间的度量。
目前,立体成像,结构化的光投影和飞行时间(或ToF)这三项领先的3D成像技术正在争夺手机和汽车中的市场空间。
通过3D成像技术,可以实现行人检测,基于面部特征对用户进行身份验证,检测手的移动并提供SLAM(同时定位和映射)算法等应用。
今天,我们主要来了解飞行时间传感器。
一、什么是飞行时间传感器?
飞行时间传感器测量物体穿过介质传播所需的时间。通常,是在发出波脉冲,从对象反射到返回到ToF传感器之间经过的时间的度量。
而飞行时间相机是一种利用ToF测量来确定相机与物体或环境之间的距离,创建由单独测量的点生成的图像的设备。
ToF相机的应用包括基于激光的无扫描器LiDAR成像系统,运动感测和跟踪,用于机器视觉和自动驾驶的物体检测,地形图等等。
二、飞行时间传感器确定距离的方法
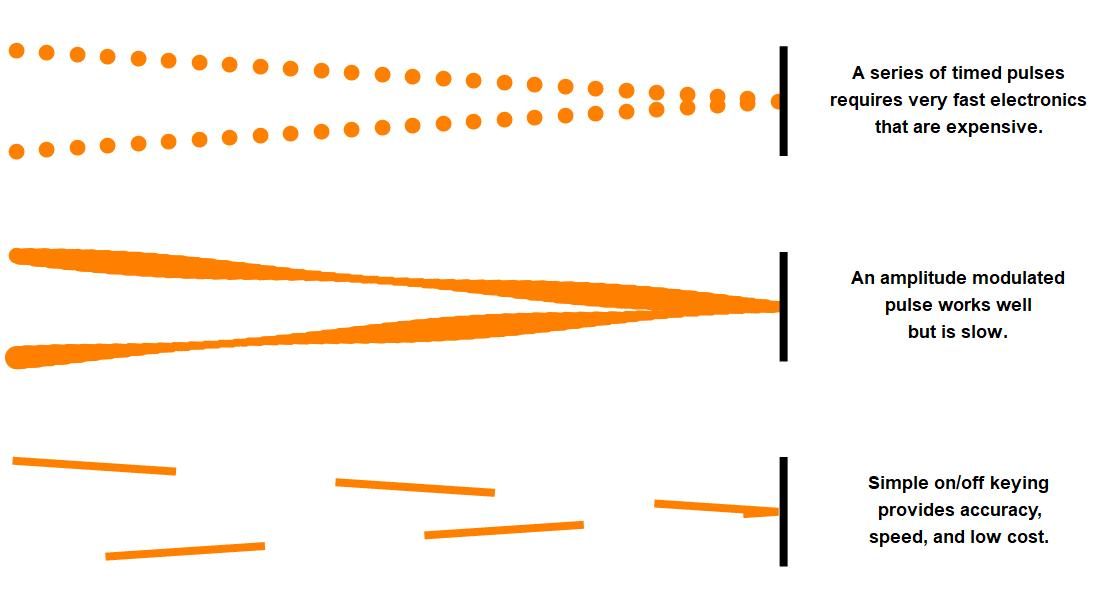
使用飞行时间来确定距离的方法有以下3种:
①、在图像的顶部,您可以看到第一种方法,该方法是发送脉冲并测量时间间隔,直到它们在反射后返回为止。
②、图像的中间部分显示了第二种方法,其中您可以调制光源的振幅并记录反射波的相移。
③、图像的底部表示第三种方法,该方法传输占空比为50%的方波,并记录在特定间隔内到达的返回光量。
利用飞行时间确定距离的方法
但在实际应用中,确定距离的方法远没有这么简单。比如,当飞行时间传感器应用在相机中,实现毫米级精密ToF相机时,以上利用飞行时间确定距离的方法就不太适用了,而是需要经过改进。
光波和无线电波的传播速度接近300,000,000,000mm/s,对于波传播1mm,光波和无线电波的传播速度约为3.3ps(返回波速为3.3ps)。这意味着,如果您想要一个可以对房间内所有物体成像的设备,并且想要的分辨率约为1毫米,则定时电子设备将需要皮秒级的分辨率,转化为数百GHz的时钟速度。
设计在这些频率下工作的电子电路既不容易,也不经济,因此,如果设计人员希望将这些设备带入消费市场,那么他们必须想出一种在较低频率下工作的方法。
存在两种常见的方法,可以在合理的GHz频率下实现毫米级精度:
将正弦调制波的相移与距离相关;
使用50%占空比方波的相移和差分电压来确定距离。
在以下各节中,我们将更详细地介绍这两种方法。
三、改进飞行时间传感器确定距离的方法
通过调幅波的相移确定距离
假设您要绘制最大长度为15m的小型办公室或大型客厅。要确定适合该长度的工作频率,请使用Ç=λ·&˚FC=λ⋅F其中c是光速(c=3x108m/s),λ是一个波长(λ=15m),ƒ是频率。在此示例中,ƒ=20MHz,这是一个相对容易使用的频率。
当亮光的输出由20MHz正弦信号调制时,一切就开始了。光波最终将到达物体或墙壁,并且将反射和反转方向。原始调制光的调光器版本将返回接收器。除非对象恰好是15米的整数倍,否则相位将偏移一定量。
相移可用于计算波传播的距离。
如果您可以准确地测量相角,则可以准确地确定反射物体与传感器/接收器的距离。
如何测量正弦波的相角?
那么,如何快速测量正弦波的相位角?这涉及在四个等距的点(即90°或1/4λ的间隔)处测量接收信号的幅度。
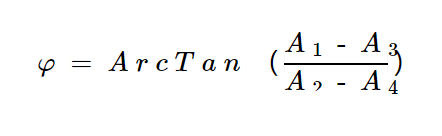
我试图在下面说明测量值和相角之间的关系。A1和A3之间的差与A2和A4之间的差之比等于相角的切线。ArcTan实际上是两个参数的反正切函数,该函数映射适当的象限,并将A2=A4且A1>A3或A3>A1分别定义为0°或180°。
下面图像说明了变量A1,A2,A3和A4的差如何拟合到单位圆上。
在上面的插图中,图形的最左侧有两条垂直数字线,显示了减去A1和A3(表示为深黄色)以及A2和A4(表示为蓝色)的结果。测量值在中间的正弦曲线图中显示为垂直线。
请注意,此图形未考虑反射(这将使所有物体有效地移动180°)。
确定给定距离的工作频率:
回到我们的示例,到目标的距离由以下公式确定:
其中c是光速,phi(φ)是相位角(以弧度为单位),ƒ是调制频率。
测量光子的实际飞行时间需要333GHz电子设备。此方法最大需要4倍的调制频率,在这种情况下为4x20MHz=80MHz。这显着减少了资源。但是,您会很高兴知道一些聪明的工程师找到了一种进一步降低最大频率的方法。
通过带电电容器的差分电压测量确定相移
下一个测量情况涉及频闪光源和每个像素有两个电容器的CMOS成像传感器。
时钟源产生占空比为50%的方波,该方波控制明亮的选通光源以及与每个像素内部的电荷存储电容器的连接。
下图显示了这种系统的示例:
“光子混合器设备固态阵列LiDARS的快速校准方法”中的图像显示了一个CMOS像素,该像素带有两个交替连接的电荷存储电容器,以记录入射光。
光线离开光源,反射离开物体,然后撞击像素,该像素将作为电荷记录在上面所示的电容器CA或CB中。电容器使用相同的时钟源以与照明源相同的频率交替连接至像素。
这种巧妙的安排意味着电容器中的差分电荷直接与相位偏移有关。相位由波长以及到目标和目标的距离确定。
来自“光子混合器设备固态阵列LiDARS的快速校准方法”的图像
可以照亮被摄对象充电容器所需的次数。只要距离恒定,电荷比例将保持不变。
那么这种方法的效果如何呢?
提供给AAC的传感器与随附的软件结合使用,能够记录高达45fps的图像。在较低的刷新率下,系统可以轻松成像衬衫上的皱纹。
上图绘制了从Pmd的picoflexx相机捕获的每个像素的(x,y,z)顶点位置。
仅深度数据本身很难可视化。因此,深度图像通常与照片结合在一起,或使用假色显示,以使场景更容易可视化。
上图显示出,低分辨率图像的伪彩色深度覆盖层使解释场景更加容易。使用Pmd的RoyalViewer软件和CamBoardpicoflexx3D开发套件捕获的goober作者的图像。
飞行时间传感器可用于多种应用中,包括将巧妙的物理技术与工程技术结合起来创建环境的3D地图。
-
传感器
+关注
关注
2551文章
51126浏览量
753774
发布评论请先 登录
相关推荐
GUD8矿用本安性磁性传感器检测距离怎样确定
集成时间数字转换器简化了飞行时间测距应用的设计


艾迈斯欧司朗发布新一代单区直接飞行时间(dToF)传感器TMF8806
激光测距传感器输出什么信号
解读工业机器人避障常用的视觉传感器、激光传感器、红外传感器、超声波传感器

贸泽开售适用于存在检测和系统激活应用的STMicroelectronics VL53L4ED飞行时间接近传感器
意法半导体宣布推出一款全能型、直接式飞行时间3D激光雷达模组
意法半导体的多区飞行时间(ToF)传感器系列介绍

多区飞行时间(ToF)传感器的特点

飞行时间传感器:技术原理与多元应用






 工商网监
工商网监
评论