 stm32异步串口通讯配置过程
stm32异步串口通讯配置过程
| 串口是一种全双工通讯方式
单工
数据传输只支持数据在一个方向上传输
半双工
允许数据在两个方向上传输,在同一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信
全双工
允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力
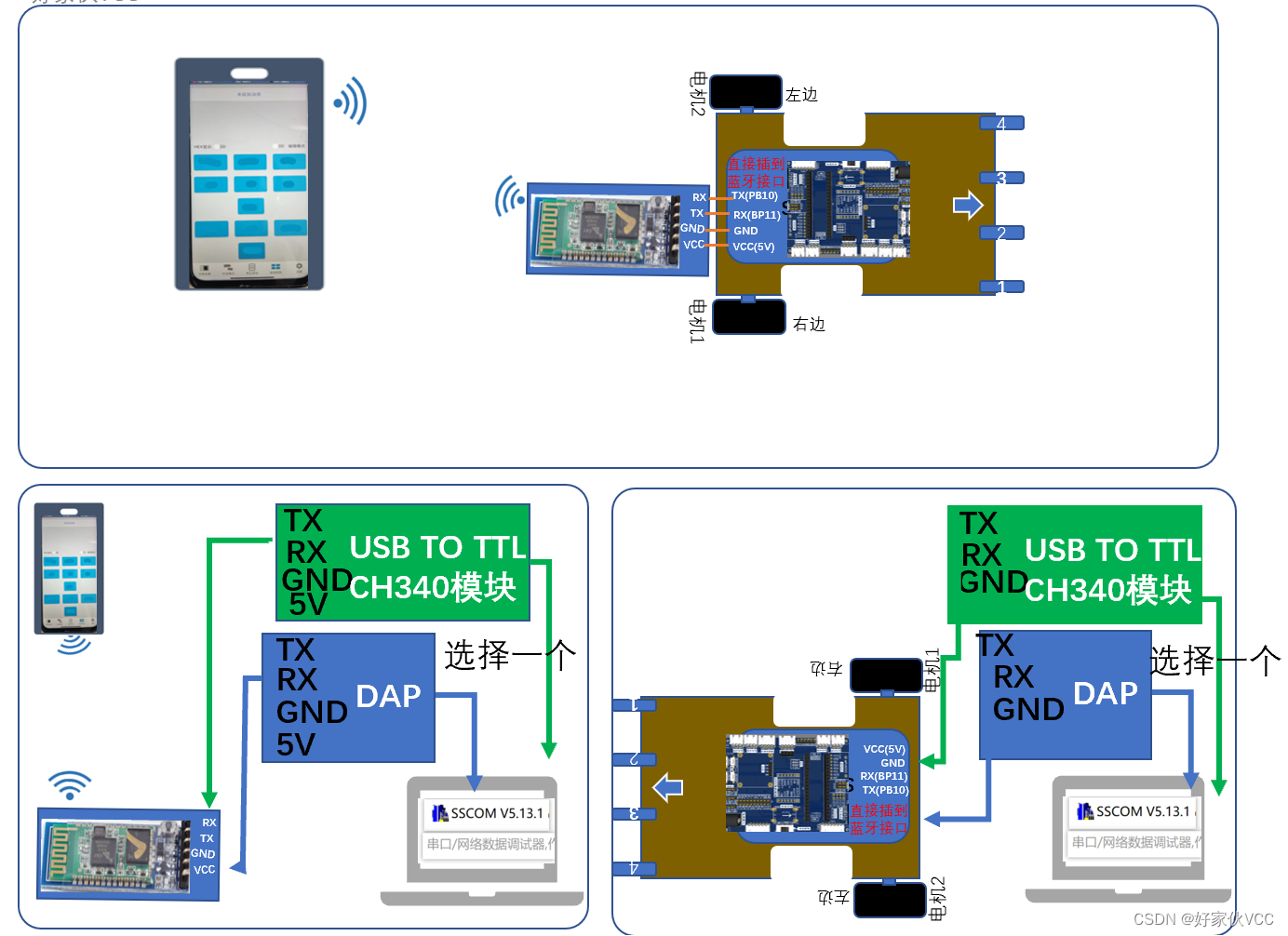
异步串口常见连接方式
相同端口数据传输
不同端口数据传输
这里必须保证通讯两端数据共地,此外还需注意不同端口间的电平转换,如TTL、232.
| 异步通讯时序图
这里以8位字长为例,进行数据传输时,接收方首先捕捉数据起始位- -由高电平到低电平的数据跳变,低电平会保持一个数据周期(空闲时,数据线保持高电平)
1-8-1
紧接着起始位的是8位有效数据(低地址数据LSB在前),这里特别注意,若设置了奇偶校验,奇偶校验位会占据一位有效数据,即写进数据寄存器数据的MSB位被校验位替换后发送出去,如下表所示:
最后为1位停止位,停止位为有效高电平
| 奇偶校验
使能校验功能后,写进数据寄存器的数据的MSB位被校验位替换后发送出去(如果选择偶校验偶数个’1’,如果选择奇校验奇数个’1’)。
偶校验:校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为偶数。
例如:数据=00110101,有4个’1’,如果选择偶校验,校验位是’0’。
奇校验:此校验位使得一帧中的7或8个LSB数据以及校验位中’1’的个数为奇数。
例如:数据=00110101,有4个’1’,如果选择奇校验,校验位是’1’。
| 波特率的产生
RX/TX 波特率=FCK/(16*USARTDIV )
这里的FCK为串口模块的输入时钟频率,通常首先确定想得到的波特率,而后通过上述公式,解得USARTDIV ,进而将USARTDIV的小数和整数部分分别填入波特率寄存器(USART_BRR)的整数DIV_Mantissa和小数DIV_Fraction部分中。
例如: 求得 USARTDIV = 25.62时,就有:DIV_Fraction = 16*0.62 = 9.92 最接近的整数是: 10 = 0x0A DIV_Mantissa = mantissa (25.620) = 25 = 0x19于是, USART_BRR = 0x19A
| 异步串口通讯的基本配置过程
1. 使能串口及对应引脚时钟
2. 配置引脚,根据需要决定是否重映射
TX输出引脚 -- 传输速率50M_hz,复用推挽输出
RX输入引脚 -- 浮空输入
3.串口参数初始化
设置字长、停止位个数、是否开启校验位及选择校验方式(CR1、CR2寄存器),波特率设置
4. 配置中断优先级
抢占优先级、子优先级,使能中断通道
5. 根据需要,开启串口部分中断(CR1)
6. 使能串口(CR1)
stm32串口有独立的收发能力,可根据需要单独开启/关闭接收、发送单元
-
STM32
+关注
关注
2270文章
10900浏览量
356093 -
串口
+关注
关注
14文章
1554浏览量
76532
发布评论请先 登录
相关推荐
串口通信的开发环境配置
嵌入式学习-飞凌嵌入式ElfBoard ELF 1板卡-串口通讯编程示例之串口硬件原理
飞凌嵌入式ElfBoard ELF 1板卡-串口通讯编程示例之串口硬件原理
stm32用串口烧录怎么设置
EU104:一款支持1扩4的通用异步串口扩展芯片,满足绝大部分串口设备的通讯要求
台达DVP系列串口驱动全面解析

求助,关于STM32 USB转串口与其他单片机通讯问题求解
深度解析STM32串口通信基本原理






 工商网监
工商网监
评论