 智能汽车能否识别和绕开物体
智能汽车能否识别和绕开物体
自动驾驶能否识别障碍物的能力与环境感知同等重要,如何安全有效的规划行驶路线,是自动驾驶汽车需解决的最大的难题之一。事实上,路径规划技术,现阶段是一个非常活跃的研究领域。路径规划之所以如此复杂,是因为其涵盖了自动驾驶的所有技术领域,从最基础的制动器,到感知周围环境的传感器,再到定位及预测模型等等。准确的路径规划,要求汽车要理解我们所处的位置以及周边的物体(其他车辆、行人、动物等)会在接下来的几秒钟内采取什么样的行为。
首先来说一下三个名词:路径规划、避障规划、轨迹规划
路径规划通常指全局的路径规划,也可以叫全局导航规划,从出发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。
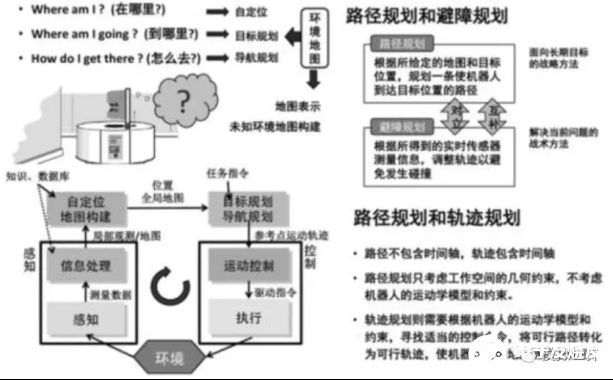
避障规划又叫局部路径规划,又可叫动态路径规划,也可以叫即时导航规划。 主要是探测障碍物,并对障碍物的移动轨迹跟踪( Moving Object Detection and Tracking ,一般缩写为MODAT)做出下一步可能位置的推算,最终绘制出一幅包含现存碰撞风险和潜在碰撞风险的障碍物地图,这个潜在的风险提示是100毫秒级,未来需要进一步提高,这对传感器、算法的效率和处理器的运算能力都是极大的挑战,避障规划不仅考虑空间还考虑时间序列,在复杂的市区运算量惊人,可能超过30TFLOPS,这是无人车难度最高的环节。未来还要加入V2X地图,避障规划会更复杂,加入V2X地图,基本可确保无人车不会发生任何形式的主动碰撞。
轨迹规划则源自机器人研究,通常是说机械臂的路径规划。 在无人车领域,轨迹规划的定义感觉不统一。有人将避障规划与轨迹规划混淆了。轨迹规划应该是在路径规划和避障规划的基础上,考虑时间序列和车辆动力学对车辆运行轨迹的规划,主要是车纵向加速度和车横向角速度的设定。将设定交给执行系统,转向、油门、刹车。如果有主动悬挂,那么轨迹规划可能还要考虑地形因素。
三大规划是无人车最复杂的部分,算法多不胜数,让人眼花缭乱,这也是百度、谷歌和苹果科技巨头要切入无人车领域的主要原因,这些科技巨头最擅长的就是算法的优化整合。当然传统车厂如福特和丰田,拥有对车辆动力学的绝对优势,在此领域实力并不比科技巨头要差,尤其是丰田,从开源 SLAM到KITTI,软件实力丝毫不次于谷歌。
对于全局型路径规划不算复杂,前提是有拓扑级地图,这对地图厂家来说很容易的。对于非地图厂家是有点麻烦的,不过只能算小麻烦。
今天我们重点了解一下避障规划,避障规划的前提是对周围环境有深刻的理解,有一个非常完善实时的环境理解。
在此之前不得不先要理解无人驾驶避障的含义,很明显我们根据无人驾驶避障的过程,可以将无人驾驶避障分成三个方面:
1.运动障碍物检测:对运动过程中环境中的运动障碍物进行检测,主要由车载环境感知系统完成。
2.运动障碍物碰撞轨迹预测:对运动过程中可能遇到的障碍物进行可能性评级与预测,判断与无人驾驶车辆的碰撞关系。(当你检测到障碍物后,你就得让机器判断是否会与汽车相撞)
3.运动障碍物避障:通过智能决策和路径规划,使无人驾驶车辆安全避障,由车辆路径决策系统执行。(判断了可能会与汽车发生碰撞的障碍物后,你就得去让机器做出决策来避障了)
运动障碍物检测方法
运动障碍物检测根据他们的sensor主要分成两类:
一种是基于激光雷达和毫米波雷达的
一种是基于立体视觉的
运动障碍物碰撞轨迹预测
这一部分与障碍物的检测识别分不开的。无人车的感知系统需要实时识别和追踪多个运动目标(Multi-ObjectTracking,MOT),例如车辆和行人。
物体识别是计算机视觉的核心问题之一,最近几年由于深度学习的革命性发展,计算机视觉领域大量使用CNN,物体识别的准确率和速度得到了很大提升,但总的来说物体识别算法的输出一般是有噪音的:物体的识别有可能不稳定,物体可能被遮挡,可能有短暂误识别等。自然地,MOT问题中流行的Tracking-by-detection方法就要解决这样一个难点:如何基于有噪音的识别结果获得鲁棒的物体运动轨迹。
运动障碍物的避障本质上它是一个路径规划的过程:在路段上有未知障碍物的情况下,按照一定的评价标准,寻找一条从起始状态到目标状态的无碰撞路径。
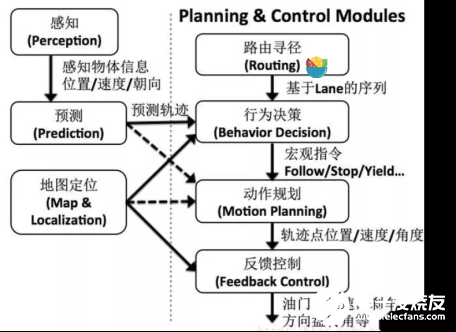
预测
预测模块的作用是对感知所探测到的物体进行行为预测,并且将预测的结果具体化为时间空间维度的轨迹传递给下游模块:行为决策模块。然后行为决策模块结合路由寻径模块从而进行行为决策。
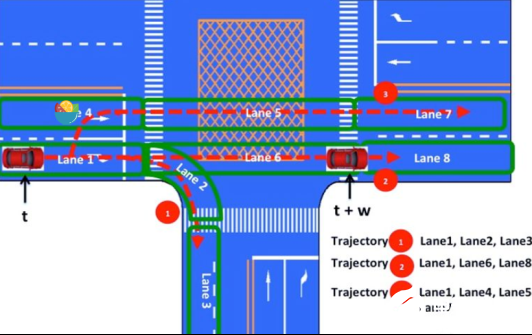
这些选择就是结合高精地图的全局规划,然后再通过汽车周边传感器感知的信息进行局部规划,从而判断汽车是否右转、直行or并道。
-
智能汽车
+关注
关注
30文章
2777浏览量
107146 -
自动驾驶
+关注
关注
783文章
13684浏览量
166147
发布评论请先 登录
相关推荐
汽车雷达回波发生器的技术原理和应用场景
tlv320adc3101evm-k评估板能否使用他刷新固件,现在软件识别不到evm如何解决?
物体识别桌 AR物体识互动桌 电容屏实物识别漫游桌
物体识别交互软件 AR实物识别桌软件 电容物体识别桌
在目标检测中大物体的重要性

能否在TAS5731初始化之前识别到TAS5731存在?
多目标智能识别系统
Meta探索开发AI耳机:识别物体和翻译外语
**十万级口语识别,离线自然说技术,让智能照明更懂你**
中国首个汽车大模型标准发布,助力汽车智能化进程加速
图像识别技术原理 图像识别技术的应用领域
用于机器人物体识别和滑动检测的磁敏触觉传感器






 工商网监
工商网监
评论