 基于双层自学习可拓控制结构的可拓控制器的改进设计及仿真分析
基于双层自学习可拓控制结构的可拓控制器的改进设计及仿真分析
引 言
可拓控制是在可拓学的基础上提出的从信息转换的角度来处理控制问题的理论与方法。可拓控制以控制输入信息的合格度(关联度)作为确定控制输出校正量的依据,通过可拓变换,使被控信息转换到合格的范围内,解决控制系统中不可控和需要控制之间的矛盾。文献提出了一种可拓控制器的设计方法,并探讨了特征模式划分与关联度计算等问题;文献提出了包括上层可拓控制器和基本可拓控制器的双层自学习可拓控制结构。
该文在上述研究的基础上,提出了一种改进的可拓控制算法,并对其进行仿真研究。研究结果表明,其算法具有简单、快速等优点。
1、可拓控制器
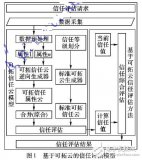
可拓控制方法是将可拓集合论的研究事物的转化关系理论与方法应用到控制问题研究上,通过将不合格范围内的控制变量转化到合格范围内,从而使控制效果从不满意转化到满意。基于这种思想,建立了如图1所示的可拓控制器的结构框图。
图1所示即为包含上层可拓控制器和基本可拓控制器的双层自学习可拓控制器的结构图。由图可知,特征量选取,特征模式划分,关联度计算,测度模式划分,控制输出5部分组成了下层的基本可拓控制器,其主要完成基本的控制功能。上层可拓控制器主要依靠人们的经验和知识对参数进行整定,作为基本可拓控制器的补充和完善,完成对基本控制的优化,保证良好的控制效果,同时反映可拓控制所强调的矛盾转化问题。
1.1 可拓控制的基本概念
首先介绍与可拓控制相关的基本概念:
(1)特征量:表征系统运动状态的变量,记为C;
(2)特征状态:由特征量C描述的系统状态,记为S;
(3)经典域:由控制指标决定的系统特征状态的取值范围;
(4)可拓域:控制器输出随系统特征状态可调整到合格范围内的特征状态的取值范围;
(5)非域:系统输出不能被调整到合格范围内的特征状态的取值范围;
(6)可拓集合:可拓域内建立的关于特征状态的集合;
(7)特征状态关联度:当前的特征状态与系统控制目标可拓集合之间的关系,记为K(s)。
将其分为K(s)≤一1,一1≤K(s)《O,K(s)≥O三种情况进行讨论,可拓控制主要研究一1≤K(s)≤O的情况;
(8)特征模式:由特征量表示系统运动状态的典型模式,记为:φi=fi(C1,C2,…,Cn),i=1,2,…,r。其中:φ表示第i个特征模式;fi表示关于φi,的模式划分;
(9)测度模式:根据特征状态关联度划分的模式,记为Mi。
1.2 基本可拓控制算法
这里参照文献采用偏差e和偏差微分e作为系统的特征量,并将特征状态划分为8个特征模式。假定被控对象的偏差和偏差微分的容许范围分别为eom和eom,系统可调的最大偏差和偏差微分分别为em和em关于特征状态S(e,e)的可拓集合可用图2表示,其中阴影部分代表经典域。
设特征平面-e占的原点为S0(0,O),记定义平面内任意一点到原点的距离为称为状态距,则有D0=M0,Dm=M-1;定义特征平面e-e上任意一点S。(e,e)的关联度为:
其中:是由系统所处的特征模式决定的;X表示经典域。
特征状态关联度K(s)表明了系统特征状态S与特征状态(e,e)的可拓集合的关联程度,由此测度模式的划分,即关联度在[一1,O]范围内的特征状态的划分可表示如下:
(1)测度模式M1,对应的特征状态处于经典控制域内。
(2)测度模式M2,对应的特征状态处于可拓域内。
(2)测度模式M3,对应的特征状态处于非域内。
可拓控制器的输出如下:
其中:u(t),u(t一1)分别为控制器当前时刻和前一时刻的输出;y(t)为当前时刻被控量的采样值;k为过程的静态增益;Kci为第M2i个测度模式的控制系数;K(s)为特征状态S的关联度;sgn(e)为偏差的符号函数,取法如下:
ε为小范围修正量,用来消除扰动和过程增益的不准确性,取法如下:
其中:Ki,K。为适当常数;占为小正数。
1.3 改进的可拓控制算法
由上述可拓控制算法可知,进行可拓控制时需要整定k,Kci,Ki,Kp,δ等参数。其整定过程依靠人们的经验知识,因此整定比较困难,尤其是Kci的整定直接影响到可拓控制效果的好坏。另一方面,通过仿真实验发现,小范围修正量ξ的整定效果不明显。因此,提出改进的控制算法,采用状态距来代替原有参数的整定。
(1)测度模式M1。经典控制域在完全可控的范围内,而可拓控制主要是在可拓域内发挥作用,因此在此范围内采用PID控制算法,旨在补偿经典域内可拓控制效果不理想的缺点。此时,控制器的输出如下:
其中:e(t),u(t)分别为PID控制器的输入和输出;KP,KI,KD三个参数的整定采用Ziegler一Nichols方法。为方便起见,此时记u(t)=u(PID)。
(2)测度模式M2。采用改进的可拓控制算法,控制器的输出为:
u(t)=y(t)/k一K(s)psgn(e)+D(s)sgn(e)
其中:u(t),u(t一1)分别为控制器当前时刻和前一时刻的输出;y(t)为当前时刻被控量的采样值;k为过程的静态增益;Kci为第M2i个测度模式的控制系数;K(s)为特征状态S的关联度;D(s)为状态距;户为修正因数;sgn(e)为偏差的符号函数,与上述取法相同。
(3)测度模式M3测度模式M3对应的特征状态较大地偏离经典域,处于非域范围内,此时控制器的输出取幅值。
综上所述,可拓控制器的输出算法如下:
2、 可拓控制算法的仿真研究
在该仿真部分,将采用相应的线性对象、延迟对象和非线性对象对改进的可拓控制算法进行仿真试验,并与传统的可拓控制算法和PID控制算法进行比较。其中,PID控制参数的选取均采用Ziegler-Nichols方法整定后的参数,输入信号为单位阶跃信号,仿真时间为500 s。
2.1 线性对象
取线性对象的传递函数为:G(s)=1/(10s+1)4,则控制效果如图3所示。
图3中,PID表示PID控制输出,EC表示传统的可拓控制算法输出,IEc表示改进后的可拓控制算法输出。
由图3中曲线可知,在误差允许范围内,PID控制、EC和IEC均能收敛,从而达到较满意的控制效果。与其他两种控制方法相比,IEC不但能更快地收敛于稳定值,而且超调量也比较小。
2.2 延迟对象
取延迟对象传递函数为:G(s)=e-10s/(5s+1)4,则控制效果如图4所示。
由4图中曲线可知,在误差允许范围内,PID控制、EC和IEC均能收敛从而达到较满意的控制效果。与PID控制相比,IEC能更快地收敛于稳定值;与EC相比,除了能更快地收敛外,IEC的波动较小、超调量几乎为0。
2.3 非线性对象
取非线性对象为开环传递函数G(s)=1/(10s+1)4的单位反馈输出的平方,控制效果如图5所示。
由图5中曲线可知,在误差允许范围内,PID控制、EC和IEc均能收敛从而达到较满意的控制效果。与PID控制相比,IEc能更快地收敛于稳定值;与EC相比,除了能更快的收敛外,IEc的波动和超调量均较小。
3、 结 语
从仿真研究来看,改进的可拓控制算法具有参数整定简单、响应快速且稳定等特点。并应用于线性对象、延迟对象和非线性对象进行仿真研究,验证该算法的可行性和有效性。结果证明了可拓控制具有良好的控制品质和较好的自学习能力,有较好的发展前景。
责任编辑:gt
-
控制器
+关注
关注
113文章
16563浏览量
180321 -
PID
+关注
关注
36文章
1475浏览量
86186
发布评论请先 登录
相关推荐
STM32之红外遥控信号自学习实现
自学习空调控制器
【乐拓USB示波器免费试用连载】A_基于乐拓示波器调试CAN通信产品过程
如何让电机自学习?
基于可编程控制器的模糊自学习锅炉燃烧控制系统
氧乐果合成反应温度的模糊自学习控制方法
自学习红外遥控器的设计与实现
自学习热转印机控制系统设计

基于可拓云的网络信任评估模型





 工商网监
工商网监
评论