 电伺服焊接控制器握手程序用法分析
电伺服焊接控制器握手程序用法分析
适用版本KUKA 8.3系统
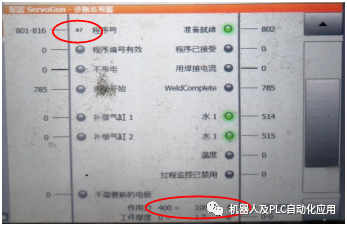
用于电伺服焊钳在调用程序前的自我检查与焊接控制器的通讯,即我给你程序序号调用91焊程序后,焊接控制器给力值400到机器人机器人反馈给焊接控制400的IO信号。用以判断通讯的好坏,数值传输的准确性,起到监控的作用!
接口故障,会触发A789(重置步进触点错误)进行故障复位,重新进行连接,连接后才能进行焊接程序的发出。
下面让我们详细分析一下:
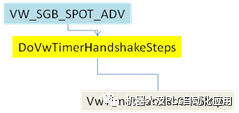
在轨迹预执行中调用,判断通讯连接情况。
在轨迹点处再次进行判断调用。
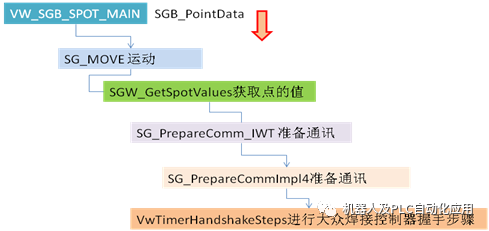

SG_CheckProgNum_WT[1]:91有效检查程序号
每次焊接都要用到的握手程序91,BOSCH力值是400
大众焊接控制器握手步骤传送程序号
VwTimerHandshakeSteps(PrepCommStep, Point_DATA, timeOutextension)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
16203浏览量
177413 -
焊接
+关注
关注
38文章
3062浏览量
59594 -
伺服
+关注
关注
16文章
645浏览量
40899
原文标题:VwTimerHandshakeSteps-电伺服焊接控制器握手程序用法分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伺服驱动器的控制方式分析
1. 引言 伺服驱动器作为连接电机与控制系统的桥梁,其性能直接影响到整个系统的响应速度、稳定性和精度。随着控制理论的发展和电子技术的革新,伺服

伺服控制器的常见故障及解决方法
伺服控制器作为工业自动化领域的核心部件,其稳定性和可靠性对于整个系统的运行至关重要。然而,在实际应用中,伺服控制器也会遇到各种故障。本文将对伺服
伺服电机与PLC控制器的区别
伺服电机与PLC控制器在工业自动化和控制系统中各自扮演着不同的角色,它们之间的区别主要体现在功能、结构、应用场景以及控制方式上。以下是对这两者区别的详细阐述。
西门子PLC与伺服控制器如何通讯
在工业自动化领域中,西门子PLC(Programmable Logic Controller,可编程逻辑控制器)与伺服控制器之间的通讯是实现高效、精确控制的关键环节。本文旨在详细阐述西
伺服控制器与PLC的区别
在现代工业自动化领域中,伺服控制器(Servo Controller)和可编程序控制器(Programmable Logic Controller,简称PLC)是两个至关重要的控制设备
伺服控制器的工作原理和基本结构
伺服控制器,作为工业自动化和精密控制领域的核心部件,其工作原理和基本结构对于理解和应用伺服系统至关重要。本文将详细阐述伺服
伺服电机控制器怎么调参数
伺服电机控制器参数调整是确保伺服系统正常运行和达到预期性能的关键步骤。本文将详细介绍伺服电机控制器的参数调整方法,包括基本原理、常见参数、调
伺服控制器编码器反馈数值为负数怎么回事
伺服控制器编码器反馈数值为负数是一个相对复杂的问题,涉及到多个方面。在这篇文章中,我们将从以下几个方面进行详细分析:伺服
伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗
伺服电缸是一种通过电动机驱动实现线性运动的设备,它的原理和结构可以简单描述如下: 原理: 伺服电缸的原理基于电动机的转电磁效应和转换机械能的能力。通过电动机的正反转和电流的






 工商网监
工商网监
评论