 C4机器人与PLC的通信IO域更改扩展
C4机器人与PLC的通信IO域更改扩展
在全自动化生产线上,必须对过程进行监控和协调,例如状态监测和过程控制。这个任务通常由 PLC 来承担。为了使 PLC 和 KR C4 能通过 PROFINET互相通讯,WorkVisual项目必须相应地扩展。在 PLC 中必须同样存在一个 PROFINET 项目设置 — 该项目设置将KR C4 参数化为从属设备。KR C4 可以从两种不同的角度来配置。配置为具有 “ 标准 ” 输入 / 输出的 “ 标准 ” PROFINET 用户或者配置为具有安全输入 / 输出的PROFIsafe用户。
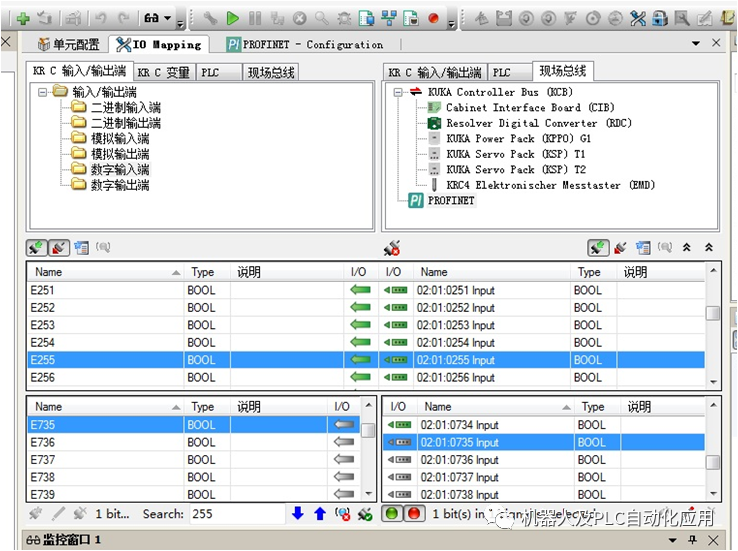
1.KR C4 的输出是PLC 的输入
2.KR C4 的输入 是PLC 的输出
3.数字输出先在PLC 端被写入 输出存储器,然后才被传输。PLC的数字输出在KRC4 端被存放在输入存储器中。
4.在 WorkVisual中,KRC4 输入存储器 和 KR C4 输入/ 输出端 之间的接线在接线显示器中配置。
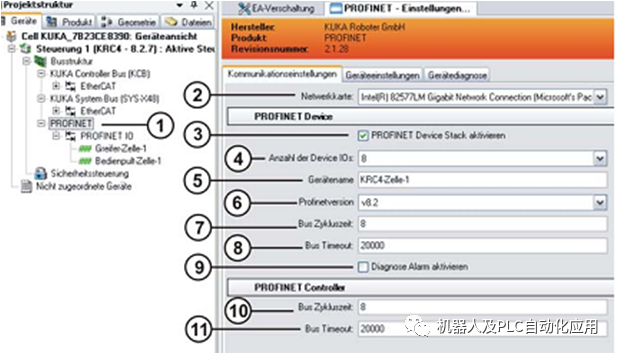
| 1 | ProfiNet(工业以太网) | DTM |
| 2 | 网卡 | 笔记本电脑的网卡,通过它与控制器相连接。 |
| 3 | ProfiNet堆栈 | 激活 PROFINET 设备栈 |
| 4 | 从属设备输入输出数量 | 用于 PLC 通讯的数字输入输出信道的数量。最多 2032 个 |
| 5 | 设备名称 | 用于 KR C4 的 PROFINET 设备名称 与 PLC 项目中的设备名称相同。 |
| 6 | ProfiNet版本 | 取决于 KSS 版本 (8.1 或 v8.2) |
| 7 | 从属设备运行时总线循环时间 | 在 ProfiNet中发送或者接收电报的节拍时间。 |
| 8 | 从属设备运行时总线超时 | 到 PLC 已完成 KR C4 初始化的最长允许时间,单位为毫秒若此时间已过而未成功,则将产生故障信息。 |
| 9 | 诊断警报 | |
| 10 | 总线循环时间--控制器 | 在 ProfiNet中发送或者接收电报的节拍时间。 |
| 11 | 总线超时--控制器 | 到 KR C4 已将所有从属总线模块初始化的最长允许时间,单位为毫秒。若此时间已过而未成功,则将产生故障信息。 |
下面让我突破VASS试一下。

设置与上位机通讯的长度 : 可以改为1024(1024位)

在机器人中分配IO到1024,让后编译下载到机器人,并在机器人中激活项目.
PLC程序中加入KUKA机器人的组态文件

在标准通讯区,选择1024与机器人相对应,然后下载程序到PLC.
可以通过机器人给PLC发出信号,再通过PLC软件的监控功能,查看效果.

机器人编程结合练习:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5011文章
13291浏览量
463270 -
存储器
+关注
关注
38文章
7490浏览量
163819 -
自动化
+关注
关注
29文章
5571浏览量
79269
原文标题:C4机器人与PLC的通信IO域更改扩展
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ModbusTCP转Profinet:ABB机器人与PLC的高效连接
在工业自动化领域,不同设备间的通讯和数据交换是系统稳定运行的关键。其中,ABB机器人与PLC(可编程逻辑控制器)之间的协作尤为重要。为实现这一目标,我们常常需要通过特定的通讯协议进行数据的传输和指令
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
嵌入式人工智能(EAI)将人工智能集成到机器人等物理实体中,使它们能够感知、学习环境并与之动态交互。这种能力使此类机器人能够在人类社会中有效地提供商品及服务。
数据是一种货币化工具
数据是互联网
发表于 12-24 00:33
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
。
ROS系统主要特点有哪些
(1) 提供丰富的机器人算法库
机器人的各种控制以及通信离不开算法库的支持,ROS系统提供丰富且功能强大的机器人算法库,如坐标变换、运动控制等。
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
工业机器人、PLC与自动化之间的关系
随着科技的不断进步和工业领域的快速发展,自动化已成为现代工业生产的重要趋势。在这一进程中,工业机器人和PLC(可编程逻辑控制器)作为自动化的两大核心要素,发挥着至关重要的作用。本文将深入探讨工业机器人、
ABB机器人与西门子PLC的Profinet通讯设置
在现代工业自动化领域中,机器人与PLC之间的通讯是实现高效、精准生产的重要环节。ABB机器人与西门子PLC之间的Profinet通讯设置,是实现两者无缝对接的关键。本文将详细介绍ABB
PLC与机器人之间如何通讯
在现代工业自动化领域,可编程逻辑控制器(PLC)和机器人作为两大核心设备,其间的通讯是实现自动化生产线高效、稳定运行的关键。PLC以其高可靠性、强适应性和易编程性等特点,在工业自动化控制中占据重要
如何使用PLC控制机器人
随着工业自动化技术的飞速发展,机器人技术作为其中的重要组成部分,其应用范围日益广泛。在机器人的控制系统中,PLC(Programmable Logic Controller,可编程逻辑控制器)以其
abb机器人的io通信和信号设置过程
引言 ABB机器人作为工业自动化领域的重要设备,其IO通信和信号设置是实现机器人与外部设备进行数据交换和控制的关键。本文将详细介绍ABB机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
,在 PS层运行 苏姆的裸机程序, 并将六自由度串联机器人逆解算法移植到主站代码里,进行机器人末端位置对于视觉反馈的实时跟随控制。
(4)通过实验验证了本设计的对物块识别的准确性和实时性,并使用自主
发表于 05-29 16:17
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
(运动控制)、 伺服驱动器 、IO模块和电源系统4个部分。
机器人控制系统
机器人控制器是机器人的核心部分,主要控制
发表于 05-11 09:40
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
于部分消费者来说,扫地机器人仍然是一笔不小的开支。
4.扫地机器人的未来发展前景
展望未来,搭载无刷电机的扫地机器人有望在多个方面实现突破。随着传感器技术和人工智能算法的进步,扫地
发表于 05-05 15:03
请问CAN-PLC如何扩展额外IO(输入/输出)呢?
PLC通常会提供扩展模块,可以通过这些模块来扩展IO点的数量。这些扩展模块通常可以通过现有的总线结构与P





 工商网监
工商网监
评论