 常用KUKA电伺服焊钳变量
常用KUKA电伺服焊钳变量
常用KUKA电伺服焊钳变量:

DECLGLOBALFORCEUNIT_T SGg_ForceUnit=#N 力的单位N

焊钳闭合的方向 POSITIVE 正向 /NEGATIVE负向
GLOBALINT SG_ClosingAxDir=-1

GLOBALBOOL SG_ExternalForceSensorA=TRUE 外部力传感器 /激活

GLOBALSIGNAL SG_ExtForceSensorVal $IN[4000] TO $IN[4015]
;外力传感器信号E4000-E4015

GLOBALREAL SG_TipSeatingMaxPerInit=1.0
提示电极最大单位铣削后正向突起值1.0

GLOBALREAL SG_TipSeatingMax=3.0
电极最大变差上限值,磨损值 3.0

No message 没有提示信息
Notify 通告
DECLGLOBALTSMSG_T SG_TipSeatingMsg=#QUITMSG 电极帽提示-确认信息
ServoGun[1]={Name[] "DE RC SM 19 28819",GunControl #POSITION,GunType #CGUN,CompType #EQUALIZING,ExtAxNumber 1,DriveChannel 7,WeldTimerIndex 1,GunDirection #PX,MaxRestart 3,WearMax 14.0,WearType #RATIO,WearRatio 50,ForceMax 5000.0,ForceInitNew 2000.0,ForceInit 1500.0,TipControl FALSE,TipCorrection TRUE,BGProcessActive TRUE,MultiforceActive FALSE,Dockable TRUE,XCompActive FALSE,XCompDirection #NZ,FlexCompActive TRUE,AsyBndCompActiveFALSE}


Name[] "DE RC SM 19 28819"
GunControl #POSITION 枪的控制+正向


GunType #CGUN 焊钳的类型-C型

CompType #EQUALIZING 补偿类型
Equalizintech平衡技术 NO compensation 补偿,Air compensation 空气补偿
ExtAxNumber 1外部轴数量
DriveChannel 7 驱动通道

WeldTimerIndex 1 焊接控制器指数


GunDirection #PX 枪的移动方向 正向X

MaxRestart 3最大重启次数

WearMax 14.0磨损最大值 14.0

WearType #RATIO 磨损类型 RATIO比率输入, /单独测量

WearRatio 50磨损百分比

ForceMax 5000.0 力的最大值

ForceInitNew 2000.0 更换电极的时的夹紧力

ForceInit 1500.0 铣削时的夹紧力

TipControl FALSE 电极控制

TipCorrection TRUE电极帽校正

BGProcessActive TRUE 进程激活
MultiforceActive FALSE 多个力激活

Dockable TRUE可停靠的

XCompActive FALSE X轴补偿

XCompDirection #NZ X补偿方向 Z轴的负向

FlexCompActive TRUE

AsyBndCompActive FALSE
GLOBALREAL SG_SoftendPLimit[6];软端限制
SG_SoftendPLimit[1]=-1.43475634313331
GLOBALREAL SG_ContactPosOffset[6];接触位置偏移
SG_ContactPosOffset[1]=0.0
GLOBALREAL SG_WearFix[6] ; 在单次磨损的情况下,固定尖端上电极的实际磨损SG_WearFix[1]=0.431808501
GLOBALREAL SG_WearFlex[6] ; 单个磨损情况下活动端上电极的实际磨损SG_WearFlex[1]=0.431808501
GLOBALREAL SG_Wear[6] ; 磨损比情况下电极的实际总磨损
SG_Wear[1]=0.863617
GLOBALREAL SG_TouchDiff[6]触摸差异
SG_TouchDiff[1]=3.00000
-
传感器
+关注
关注
2550文章
51045浏览量
753118 -
伺服
+关注
关注
16文章
650浏览量
40953 -
KUKA
+关注
关注
3文章
217浏览量
16518
原文标题:电伺服焊钳SG_CONFIGDATA_SERVOGUNS(ServoGun设置数据库)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
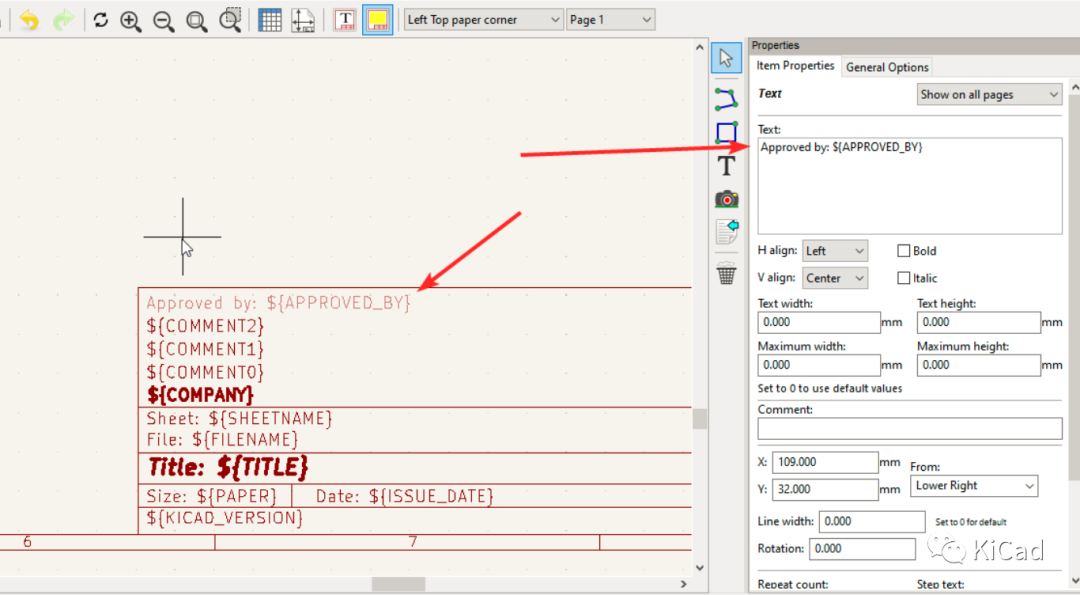
图纸模板中的文本变量
Linux环境变量配置方法
伺服驱动器一上电就报过载解决方法及具体案例
伺服驱动器不上电是什么原因

常用伺服电机的类型及其特点
松下伺服电机怎么调速度
伺服电机常用的三种控制模式有哪些
宽调速永磁直流伺服电机原理 永磁式直流伺服电机常用的调速装置是什么
C语言变量应用详解

伺服电缸和伺服压机区别 伺服电缸能取代液压油缸吗






 工商网监
工商网监
评论