 KUKA机器人练习:制作一条报警信息!
KUKA机器人练习:制作一条报警信息!

Set_KrlMsg(#State, USER_MSG, Par[], Opt)报警信息函数
定义的 KUKA 结构:KrlMsg_T
STRUC KrlMsg_T CHAR Modul[24], INT Nr, CHARMsg_txt[80]
Modul[ ]可包含最多 24 个字符。
Nr是可自由选择的整数
不能识别二次使用的编号。
信息文本: Msg_txt[ ] ,Msg_txt[ ] 可包含最多 80 个字符。
如需对下一条信息的 Msg_txt[ ] 重新进行初始化,则必须先删除“原有的”内容。
例:
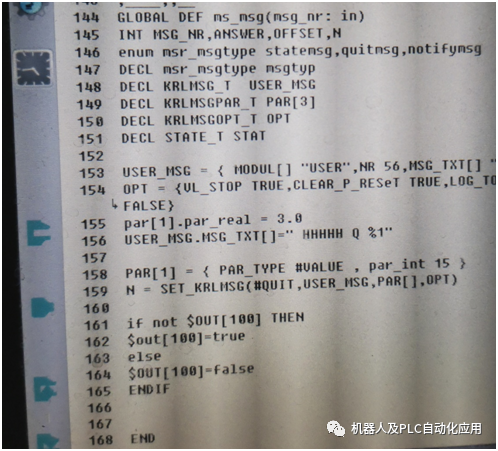
DECL KrlMsg_TUSER_MSG
USER_MSG = {Modul[] "user", Nr -1, Msg_txt[] " "}
发送人: Modul[ ]"user "

信息号: Nr 56
信息文本: Msg_txt[ ] "HHHHH Q %1 "

枚举数据类型 EKrlMsgType
ENUM EKrlMsgType Notify, State, Quit,Waiting
#Quit : 将该信息提示作为确认信息发出
#STATE: 将该信息提示作为状态信息发出
#NOTIFY:将该信息提示作为提示信息发出
#WAITING: 将该信息提示作为等待信息发出
信息文本中的变量%1,%2,%3
因此,需要 3 组参数。每组参数由 KUKA 结构 KrlMsgPar_T 构成:
Enum KrlMsgParType_T Value, Key, Empty
STRUC KrlMsgPar_T KrlMsgParType_T Par_Type,CHAR Par_txt[26], INT
Par_Int, REAL Par_Real, BOOL Par_Bool
例如:
DECLKrlMsgPar_T Par[3]
Par[1] = {Par_type #Value, Par_Int 15 }

Par_Type : 参数 / 通配符的类型
#VALUE : 参数直接以传递的形式代入信息文本中 (即作为字符串、INT、REAL 或 BOOL 值)
#KEY: 该参数是一个为载入相应的文本用于在信息提示数据库中进行查找的关键词
#EMPTY : 参数是空的。
Par_txt[26] : 参数的文字或关键词
Par_Int: 将一个整数值作为参数传递
Par_Real : 将一个实数值作为参数传递
Par_Bool : 将一个布尔值作为参数传递,显示的文字为TRUE 或 FALSE
练习:在USR_S中编辑一个Ms_msg的程序
然后通过:中断程序触发.
GLOBALINTERRUPTDECL26WHEN $IN[100] == true DO ms_msg()
INTERRUPT ON 26
-
数据库
+关注
关注
7文章
3799浏览量
64381 -
函数
+关注
关注
3文章
4331浏览量
62597 -
KUKA
+关注
关注
3文章
217浏览量
16527
原文标题:KUKA 机器人练习:制作一条报警信息!
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论