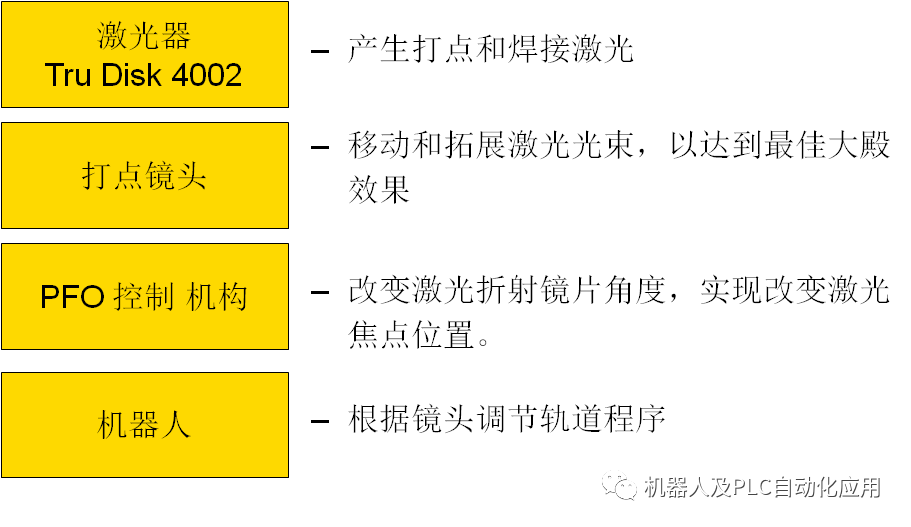
 PFO飞行热熔激光焊接
PFO飞行热熔激光焊接
PFO飞行热熔激光焊接
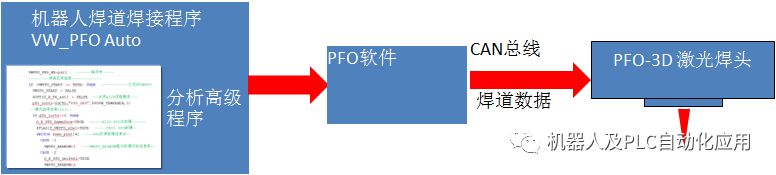
控制示意图:
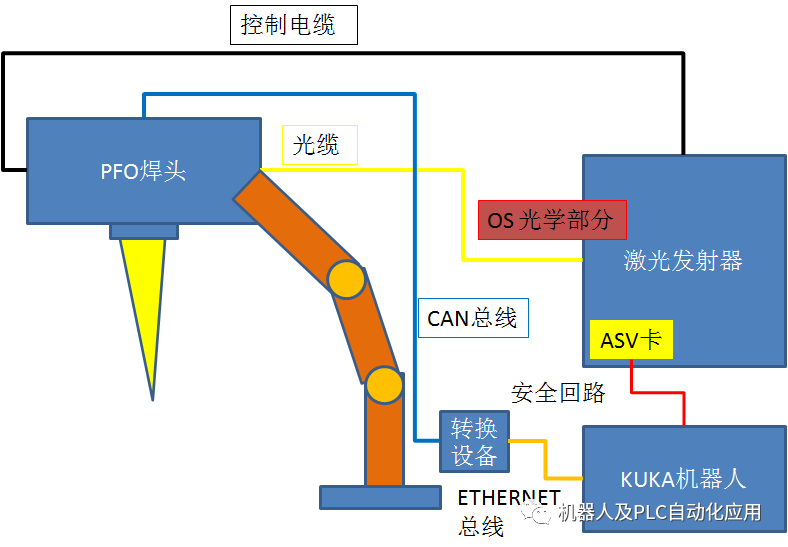
机器人使用插件:
PFODRIVER 插件
ECAT_SYS_X44插件
机器人CCU版接口X44:Ethernet总线地址:172.20.3.3
转换器设备的设备EtherNET总线地址:172.20.3.99
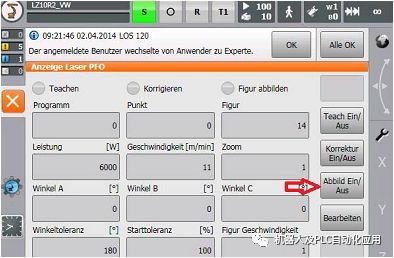
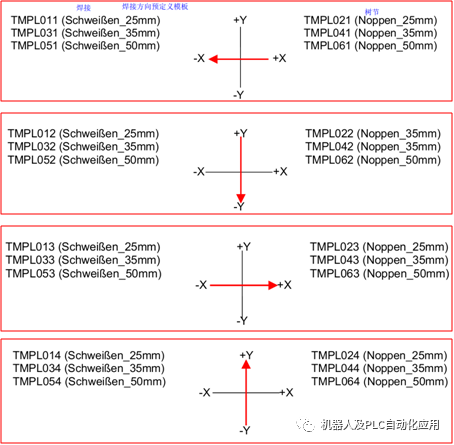
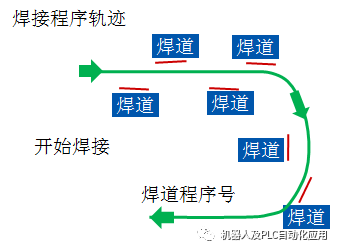
固定图形的长度和方向用不同的图像号来代替
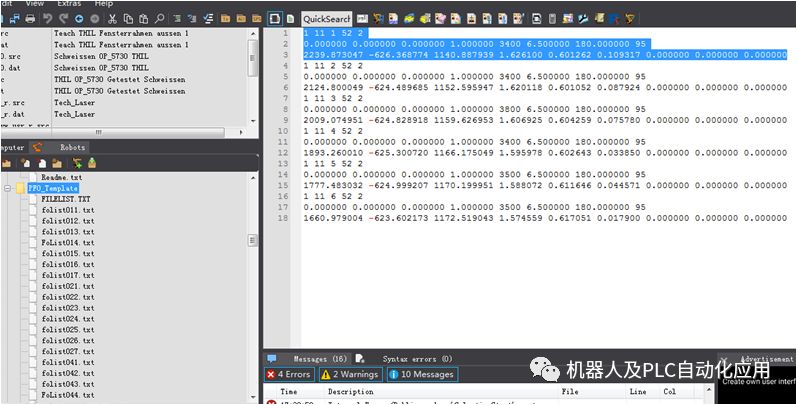
焊道位置示教程序分析
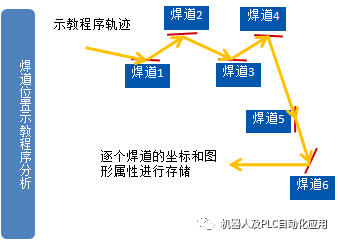
1.机器人在执行焊道位置示教程序时,当机器人运行到焊道轨迹点时,通过KUKA 用户程序记录焊道的程序号,焊点号,焊道图形属性和坐标值,然后存到PFO应用软件数据库里。
使用软件库中的标准图形的用户程序

2: VW_PFO VIRT_PUNKT Programm=14 Punkt=7 Betriebsart =fahre ZIRK Auftrag = Teach Template Rampe = Ende
使用圆弧进行焊接
2: VW_PFO VIRT_PUNKT Programm=14 Punkt=8 Betriebsart =fahre PTP Auftrag = Teach Template Rampe = AUS
使用PTP点到点进行焊接
3: VW_PFO VIRT_PUNKT Programm=56 Punk t=2 Betriebsart =fahre LIN Auftrag = Teach Template Rampe = AUS
使用LIN点到点进行焊接
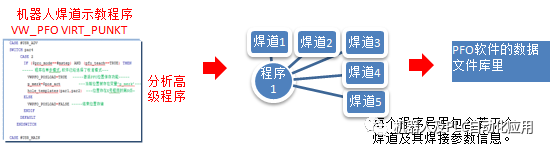
焊接程序分析
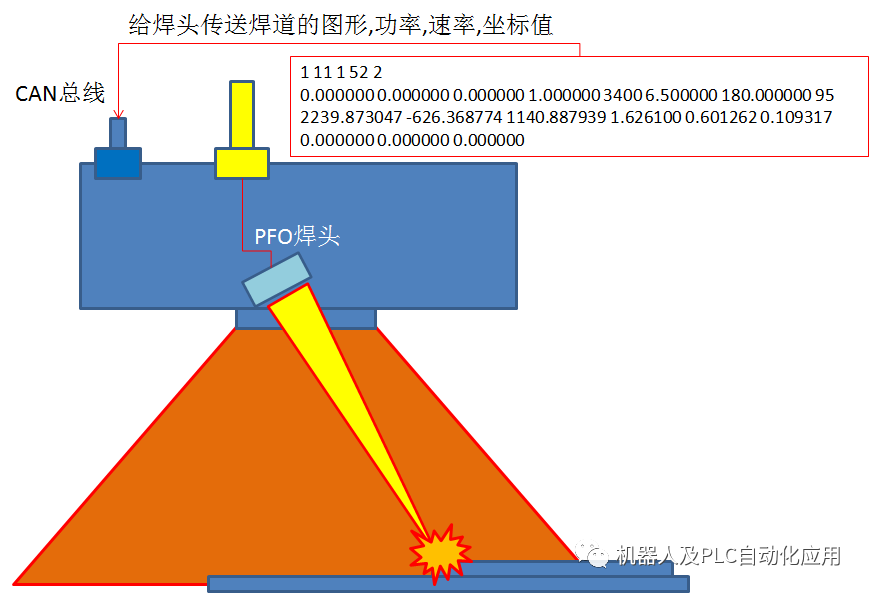
2.机器人在执行飞行焊接程序时,通过KUKA 用户程序调用焊道的程序号,给PFO软件,然后PFO软件将此程序号里激活的所有焊道及其数据都通过CAN总线发送给PFO焊头,焊头对此程序号内所有焊道逐一进行焊接。

-
转换器
+关注
关注
27文章
8685浏览量
147076 -
机器人
+关注
关注
211文章
28379浏览量
206899 -
焊接
+关注
关注
38文章
3114浏览量
59691
原文标题:KUKA机器人PFO焊头控制方法
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
激光焊接技术在焊接医疗针管的工艺应用



铜激光焊接技术篇——铜激光焊接难点分析

到底多少钱才能买到熔深厚度合适的大功率手持激光焊机?
激光熔覆设备的配置如何选择

宽带激光熔覆设备的特点及应用

激光焊接技术在焊接医疗弹簧的工艺应用

焊接速度超乎想象?手持激光焊接机让汽车生产如虎添翼!


激光熔覆工艺深度解析:原理、分类与材料选择
纳秒激光焊接机如何实现高精度焊接







 工商网监
工商网监
评论