 采用神经网络与模糊推理结合实现环境实验室温湿度监测系统的设计
采用神经网络与模糊推理结合实现环境实验室温湿度监测系统的设计

传统的温、湿度闭环控制通常采用开关控制或PID控制,前者实现简单但精度差,后者精度高,但需建立数学模型,参数整定要求较高,而在温湿度非线性复杂变化的环境下,不易精确建模。模糊控制理论是能够模拟人脑智能,随环境变化的自适应控制技术,适合于非线性系统和难以用数学模型精确描述的复杂系统。进一步可以采用神经网络与模糊推理结合的控制新模式。
1、环境实验室温湿度监控系统结构
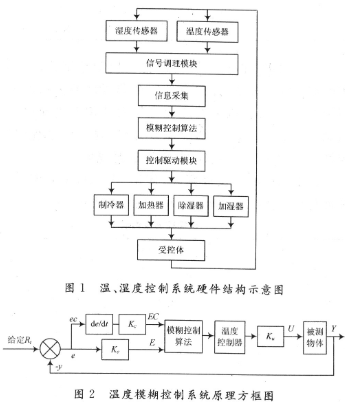
环境实验室温、湿度监测控制机构见图1。温、湿度传感器测得的信号经过调理,输入到模糊控制算法模块,产生决策信号控制驱动件(加热器、制冷器、加湿器、除湿器),保持环境实验室温、湿度恒定在设定值。
2、控制系统模糊控制机理
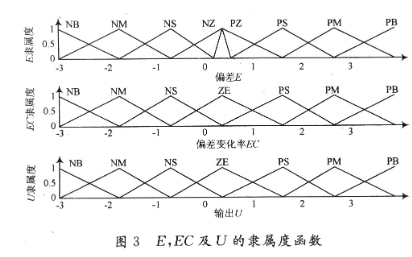
典型的模糊逻辑控制由模糊化、模糊推理和清晰化三部分组成。下面以温度控制为例来具体说明。依据传统模糊控制模型,本设计中温度模糊控制系统原理如图2所示。
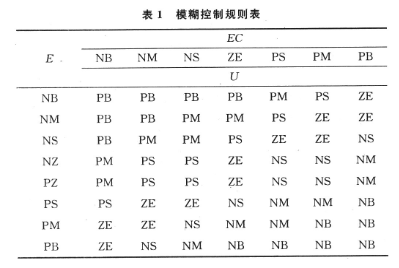
模糊控制器选用双输人单输出控制方式,以温度误差e和误差变化率ec作为输入变量,以u作为输出变量。模糊子集为E=EC=U={NB,NM,NS,ZE,PS,PM,PB}={负大,负中,负小,零,正小,正中,正大),其论域为:e=ec=u=[-3,3]={-3,-2,-1,0,1,2,3}。隶属度函数采用三角分布函数,如图3所示。
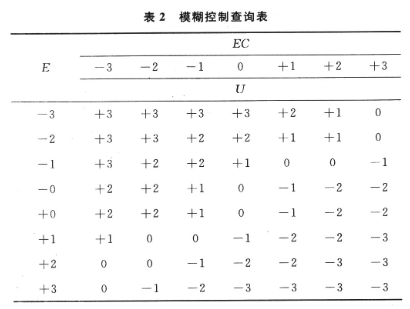
根据控制系统的输入/输出特性,以消除温度偏差为控制目标,制订控制规则如表1所示。
由模糊规则进行推理可以得出模糊控制器语言规则的输入输出关系,其关系是一个非线性的关系曲面。当偏差较大时,控制量的变化应尽力使偏差迅速减小;当偏差较小时,除了要消除偏差外,还要考虑系统的稳定性,防止系统出现过冲,甚至引起系统振荡。由隶属度函数及规则表,使用Mamdani推理方法和面积重心法进行清晰化,可得到控制查询表。
对应输出量U实际意义如表3所示。
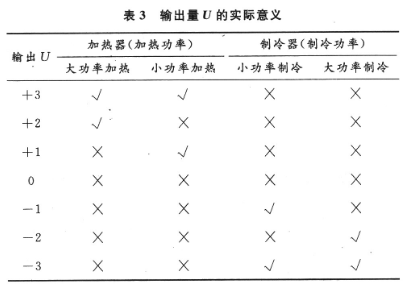
注:√表示启动;×表示不启动
工作机理:依照模糊控制查询表建立的二维常数数组,将输入偏差E和偏差变化率EC量化到其基础变量论域,作为数组的行和列实时检索该查询表,得到实时输出U,依照输出量U的实际意义控制加热器或制冷器,从而驱使温度稳定在设定值。
3、控制系统程序设计
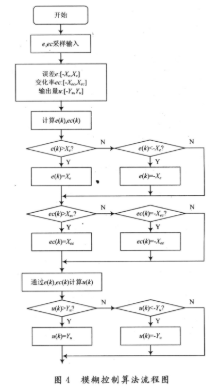
采用ST语言进行程序设计,包括主程序、模糊控制算法、中断服务程序、操作命令与报警程序,其中模糊控制算法程序流程图如图4所示。
4、应用效果
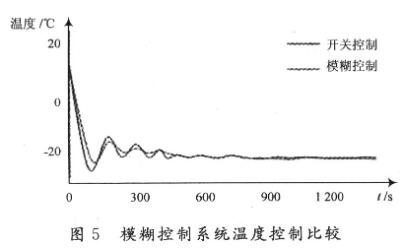
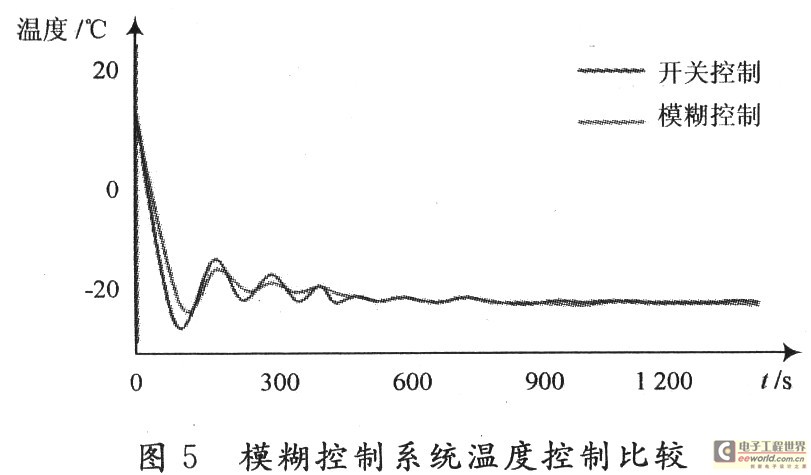
外部环境温度从16℃降温到-20℃,应用效果如图5所示,从开始到基本稳定(与设定值相差±1℃)用时510 s,系统稳定后波动范围在±O.8℃以内。收敛速度、系统稳定性与量化因子、比例因子有关,合理选择量化因子、比例因子,在收敛速度与稳定性之间取得平衡。
5、结 语
本设计采用基于模糊控制理论的控制策略,实现了环境实验室的温度、湿度的可靠测量和控制,具有精度高、稳定性好、收敛速度快等优点,与传统开关控制系统相比,具有精度、速度、稳定优势;与基于预测的模糊控制方式、双模糊控制策略、参数自学习模糊控制策略相比减少了运算复杂度。对于温、湿度具有明显耦合效应的环境,可以采用温、湿度解耦合运算后,再分别进行控制。
责任编辑:gt
-
传感器
+关注
关注
2577文章
55483浏览量
793828 -
神经网络
+关注
关注
42文章
4842浏览量
108150 -
监测系统
+关注
关注
8文章
3089浏览量
84654
发布评论请先 登录




评论