 协作机器人产品模块化态势已趋于明显,部分零部件实现国产化替代
协作机器人产品模块化态势已趋于明显,部分零部件实现国产化替代
一、产品模块化的态势已经趋于明显
协作机器人发展到现在,产品模块化的态势已经趋于明显,标准的协作机器人关节模组由角度编码器、直驱电机(DD马达)、驱动器、谐波减速机、刹车、扭矩传感器等元器件组成。
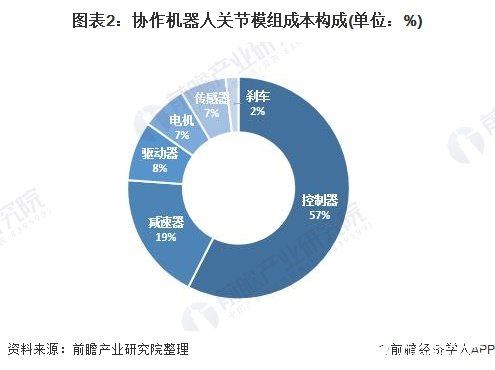
按照关节模组价格1.5万元/个计算,再结合各零部件采购价格情况,前瞻产业研究院估算,在一个协作机器人关节模组里,控制器占关节模组成本的57%;减速器占19%;驱动器占8%;电机和传感器均占7%;刹车占2%。
二、核心零部件依赖进口,部分零部件实现国产化替代
协作机器人三大核心零部件是电机、控制器和减速器,在人机协作机器人产业链中,上游核心零部件的受限于进口严重限制了我国人机协作机器人的发展,我国大部分机器人企业都集中在下游的系统集成领域。
(一)电机
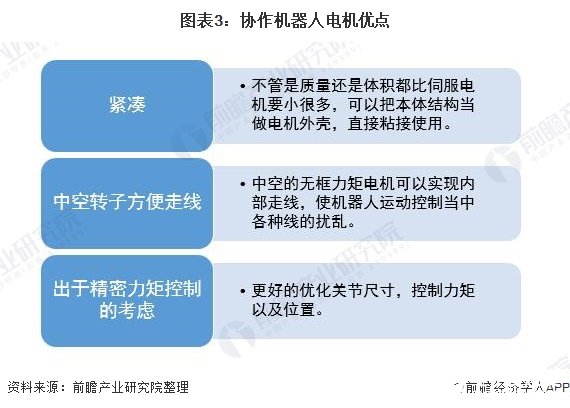
和一般工业机器人不同,协作机器人一般采用中空的力矩电机而不是普通的交流伺服电机。进口无框力矩电机的价格是同样功率伺服电机的2-3倍,之所以协作机器人关节都采用这种无框力矩电机是因为它有下列优点:
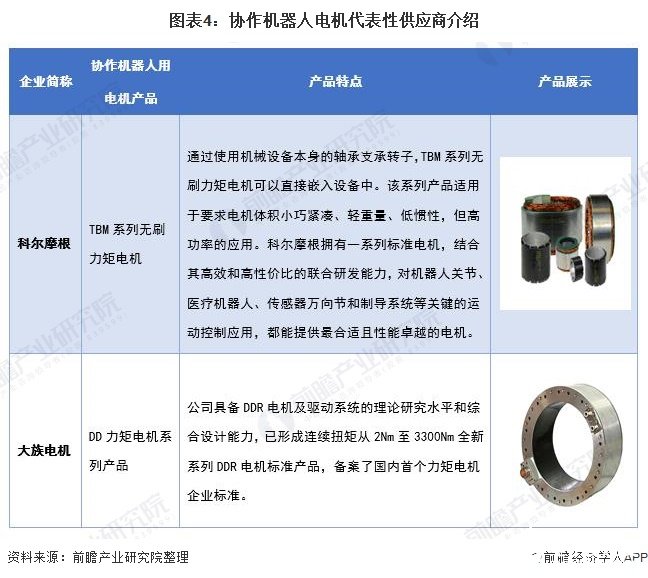
国内协作机器人电机供应商包括:科尔摩根、大族电机,以下是这两家企业协作机器人用电机产品介绍:
企业简称协作机器人用电机产品产品特点产品展示
科尔摩根TBM系列无刷力矩电机通过使用机械设备本身的轴承支承转子,TBM系列无刷力矩电机可以直接嵌入设备中。该系列产品适用于要求电机体积小巧紧凑、轻重量、低惯性,但高功率的应用。科尔摩根拥有一系列标准电机,结合其高效和高性价比的联合研发能力,对机器人关节、医疗机器人、传感器万向节和制导系统等关键的运动控制应用,都能提供最合适且性能卓越的电机。
大族电机DD力矩电机系列产品公司具备DDR电机及驱动系统的理论研究水平和综合设计能力,已形成连续扭矩从2Nm至3300Nm全新系列DDR电机标准产品,备案了国内首个力矩电机企业标准。
(二)控制器
目前国外主流协作机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发,各品牌协作机器人均有自己的控制系统与之匹配。
(三)减速器
协作机器人减速器用的减速器一般为谐波减速器,具有体积小、重量轻、传动比高、精密度高,多用于3C、半导体、食品、注塑、模具、医疗等行业的负载30Kg以下的轻载机器人,主要应用于多关节机器人的小臂、腕部或手部。
绿的谐波减速器国产化的先行者,较早实现了技术突破和规模化生产,降低了客户的采购成本和采购周期,打破了进口产品在细分行业的垄断。公司在工业机器人、数控机床等高端装备行业获得了众多知名客户的认可。2019年绿的谐波总计销售8.8万台谐波减速器,其中约七成应用于工业机器人领域。该公司客户名单中,包括了全球最大协作机器人生产商优傲。2017-2019年绿的谐波主营业务收入分别为17394.65万元、21778.37万元及18396.74万元。其中,谐波减速器及精密零部件为主营业务收入的主要来源。

三、广州精谷关节模组精度突破国际最高水平
传感器也是协作机器人关节模组的重要零部件,协作机器人传感器分为位置传感器和力扭矩传感器两大类,其中位置传感器又分为增量式传感器和绝对式传感器两大类。目前国内方面大部分厂商生产的协作机器人都不带关节力矩传感器。
位置传感器(尤其是绝对式传感器)对协作机器人的系统精度和重复定位精度起着至关重要的作用。当前国内外协作机器人厂商提供系统精度及重复定位精度都没有跳出UR协作机器人公司先前就已公布的技术指标,几乎都是重复定位精度为0.01-0.03mm,系统精度为0.1mm。由此可以看出这些世界级的机器人制造公司都没将关节元器件有机的融合在一起。

经调研,在2019年东京国际机器人展会上有五家公司展出机器人关节模组。其中三家是谐波减速机制造商,即日本哈默纳科、日本住友、中国苏州绿地;两家是传感器制造商,即日本尼康和中国广州精谷。这五家公司生产的关节模组的尺寸及重量基本都在相同的尺寸范围内,但各个公司公布的关节模组精度指标却由很大差别。五家企业具体关节模组精度指标如下:
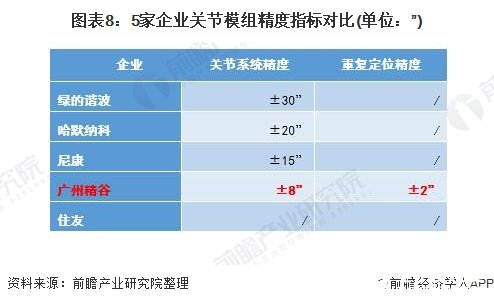
从各家公司公布的关节模组精度来看,广州精谷已经达到了超越了国外最高水平(尼康15“)。高精度关节模组是高精度协作机器人的制造基础。据悉,使用广州精谷关节模组制造的协作机器人辅以后期的标定处理绝对有机会制造出系统精度0.01mm,重复定位精度0.003mm或系统精度0.05mm,重复定位精度0.005mm的协作机器人,将来有望成为世界上精度最高的协作机器人。
责任编辑:Gt
-
驱动器
+关注
关注
52文章
8122浏览量
145869 -
机器人
+关注
关注
210文章
28138浏览量
205965 -
编码器
+关注
关注
45文章
3578浏览量
134036
发布评论请先 登录
相关推荐
复合机器人在汽车零部件上下料中的应用
万界星空科技汽车零部件行业MES介绍
倍加福VOS视觉传感器在协作机器人中的应用
三坐标CMM三次元用于测量电子零部件
江苏省汽车及零部件产业协作配套对接会在苏州举行

100%全国产化车载ACDC与DCDC电源

华为Pura 70拆解:零部件国产化率超 90%
汽车零部件MES系统功能
海康威视助力汽车零部件制造企业数字化转型
汽车零部件需要做哪些环境试验?

中国工业机器人应用与趋势剖析






 工商网监
工商网监
评论