 论述不同的抢占模型如何影响用户和系统的行为
论述不同的抢占模型如何影响用户和系统的行为
当配置Linux内核的时候,我们可以选择一些参数,这些参数能影响系统的行为。你可以用不同的优先级、调度类和抢占模型来工作。正确地选择这些参数是非常重要的。
本文将论述不同的抢占模型如何影响用户和系统的行为。
当你使用 make menuconfig配置内核的时候,你能看到这样的菜单:
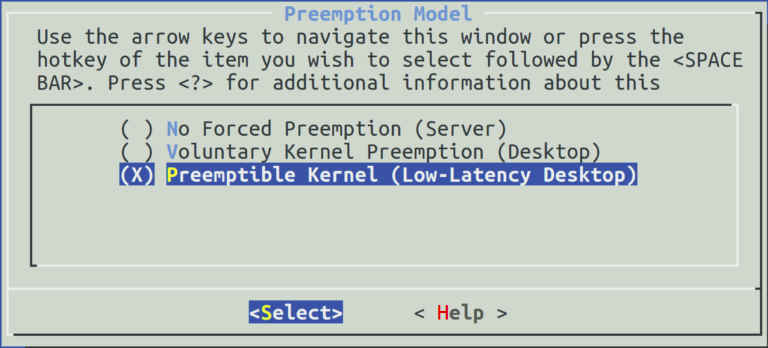
为了深入理解这三个抢占模型的区别,我们将写一个案例:
2个线程,一个高优先级RT(50),一个低优先级RT(30)
高优先级的线程要睡眠3秒
低优先级的线程用CPU来做计算
3秒后高优先级线程唤醒。
如果低优先级的线程陷入系统调用,高优先级的线程睡眠到期,究竟会发生什么?下面我们来一种模型一种模型地看。
No Forced Preemption
这种情况下,上下文切换发生在系统调用返回用户空间的点。案例如下:
2个线程,一个高优先级RT(50),一个低优先级RT(30)
高优先级的线程要睡眠3秒
低优先级的线程进入系统调用计算5秒
5秒后低优先级线程从内核系统调用返回
高优先级线程将醒来(但是比预期迟了2秒)。
内核代码,简单的字符设备:
#include
读里面delay了5秒, 注意mdelay是一个计算型的busy-loop。
用户空间代码如下:
#include
实验步骤:
高优先级线程开始睡眠3秒
低优先级线程睡眠1秒然后做系统调用
高优先级线程6秒后醒来(stop和start的时间差)
# insmod demo.ko # ./appthread1 start time=182thread2 startthread1 stop time=188thread2 stopend test
Preemptible Kernel
这种情况内核里面也可以抢占,意味着上述程序里面的高优先级线程3秒后可醒来。
这种情况下,系统会有更多的上下文切换,但是实时性更加好。对于要求软实时的嵌入式系统而言,这个选项是最佳的。但是对于服务器而言,通常第一个选项更好——更少的上下文切换,更多的CPU时间用作有用功。
运行结果(stop、start时间差3秒):
# insmod ./demo.ko#./appthread1 start time=234thread2 startthread1 stop time=237thread2 stopend test
Voluntary Kernel Preemption
这种情况和第一种情况"no forced preemption"类似,但是内核开发者可以在进行复杂操作的时候,时不时检查一下是否可以reschedule。他们可以调用might_resched()函数。
在下面的代码中,我们添加了一些检查点(check point)
// callback for read system call on the devicestatic ssize_t my_read(struct file *file, char __user *buf,size_t count,loff_t *ppos){ int len=5; if(*ppos > 0) { return 0; } mdelay(4000); // busy-wait for 4 seconds might_resched(); delay(3000); // busy wait for 3 seconds if (copy_to_user(buf , "hello" , len)) { return -EFAULT; } else { *ppos +=len; return len; }}
如果我们把might_resched()注释掉,它会delay 7秒。
添加cond_resched()调用将导致系统检查是否有高优先级的任务被唤醒,这样高优先级任务5秒可以醒来(其中1秒在systemcall之前,另外4秒在kernel)。
运行结果:
#insmod./demo.ko#./appthread1 start time=320thread2 startthread1 stop time=325thread2 stopend test
Full Real Time Preemption
如果我们使能RT补丁,我们会得到一个硬实时的kernel。这意味着任何代码可以抢占任何人。比如一个更加紧急的任务可以抢占中断服务程序ISR。这个patch进行了如下改动:
把中断服务程序转化为优先级是50的RT线程
把softIRQ转化为优先级是49的RT线程
把所有的spinlock变成mutex
其他的细小改动
打补丁后会看到2个新增的菜单:
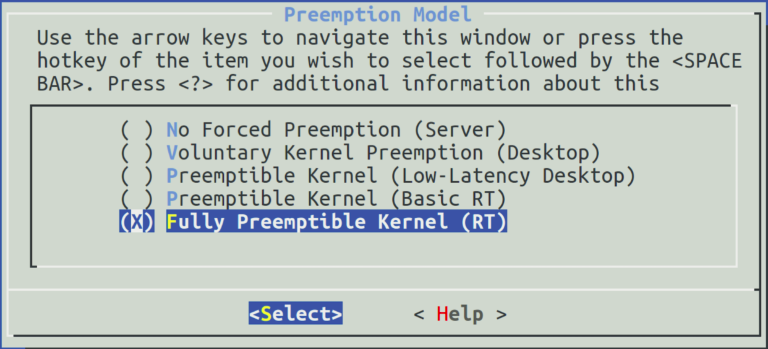
其中“Preemptible Kernel (Basic RT)” 是为了调试目的的,为了全面使用RT补丁的功能,我们应该选择最后一项 – Fully Preemptible Kernel。这样我们会有更多的上下文切换,但是可以满足RT的实时要求。
-
内核
+关注
关注
3文章
1384浏览量
40458 -
Linux
+关注
关注
87文章
11354浏览量
210667
原文标题:理解Linux内核抢占模型(最透彻一篇)
文章出处:【微信号:LinuxDev,微信公众号:Linux阅码场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「基于大模型的RAG应用开发与优化」阅读体验】+Embedding技术解读
【「大模型启示录」阅读体验】营销领域大模型的应用
【「大模型启示录」阅读体验】如何在客服领域应用大模型

SPICE模型系列的半导体器件
浅析用户行为的V2G模式下电动汽车有序充电控制负荷预测研究

基于Simscape Battery模型的电池系统建模与仿真
AI行为识别视频监控系统 Python

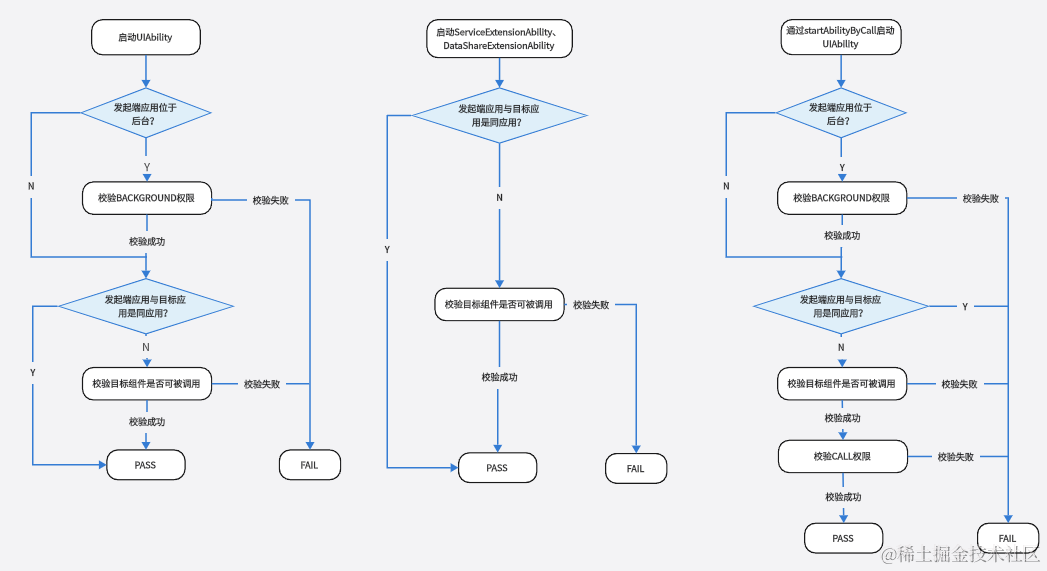
鸿蒙Ability Kit(程序框架服务)【组件启动规则(Stage模型)】
视频AI行为监测系统在高速公路中应用
系统中的latency是如何产生的






 工商网监
工商网监
评论