 解耦时所需的步骤以及注意事项
解耦时所需的步骤以及注意事项

解耦时必须注意以下事项:
设备输出端设置保持不变还是改变,取决于用哪个 IOCTL 功能给设备解耦。
IOCTL(”PNIO-CTRL”,60, [ 用户 ID]):设备输出端设置保持不变。如果将设备短时间断开电源后又重新接上,则会恢复输出端设置。
IOCTL(“PNIO-CTRL”,1060, [ 用户 ID] ):设备输出端设置不会保持不变,而是在解耦后立即归零。如果将设备短时间断开电源后又重新接上,则不会恢复输出端设置。
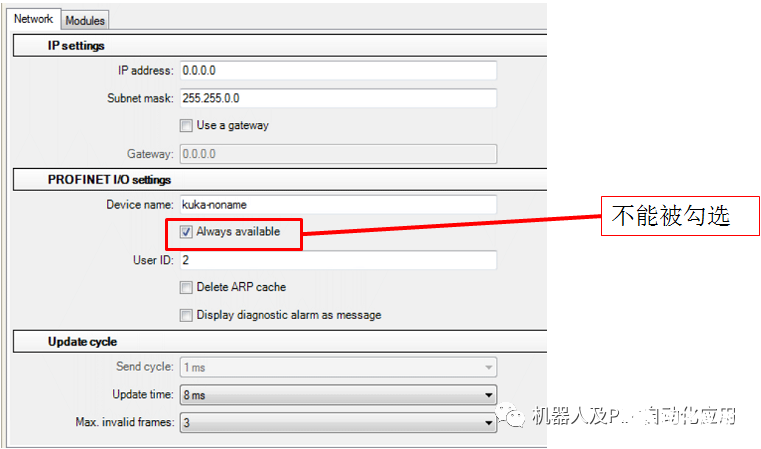
始终可用网络
勾选:机器人控制器启动时期待设备已被激活。若设备未被激活,将输出故障信息。
未勾选:机器人控制系统在启动时不检查设备是否已被激活。
解耦:
1. 在一台机器人上使用该设备时:
RET =IOCTL(”PNIO-CTRL”,60, [ 用户 ID] )
2.在一台或多台机器人上使用该设备时:
RET =IOCTL(“PNIO-CTRL”,1060, [ 用户 ID] )
耦合:
1. 在一台机器人上使用该设备时:
RET =IOCTL(”PNIO-CTRL”,50, [ 用户 ID] )
2. 在一台或多台机器人上使用该设备时:
RET =IOCTL(”PNIO-CTRL”,1050, [ 用户 ID] )
RET 的返还值:
0 IOCTL 已成功执行。
1 超时
2 IOCTL 包含一个错误参数。
------------------------------------------------
解耦的操作步骤:
1. 选择菜单序列显示 》 变量 》 单个。
2. 在名称栏输入:
在一台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,60,[ 用户识别号 ])
在一台或多台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,1060,[ 用户识别号 ])
3. 用回车键确认。设备即被解耦。
耦合的操作步骤:
1. 选择菜单序列显示 》 变量 》 单个。
2. 在名称栏输入:
在一台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,50,[ 用户识别号 ])
在一台或多台机器人上使用该设备时:
=IOCTL(“PNIO-CTRL”,1050,[ 用户识别号 ])
3. 用回车键确认。设备即被耦合。
责任编辑:dhj
-
控制系统
+关注
关注
41文章
6986浏览量
114369 -
机器人
+关注
关注
213文章
31386浏览量
223540 -
解耦
+关注
关注
0文章
43浏览量
12237
发布评论请先 登录

钽电容使用注意事项






评论